ABSTRACT
For the teleoperation of dual-arm robots with various tasks, the existence of a controller with a high degree of freedom is indispensable. Especially when precise work is required, additional information such as force feedback is very helpful for the operator. In transmitting such force information, a control device of exoskeleton-type with many points of contact with the human body can be one of the solutions. This paper proposes an optimal design method for the 7 degrees of freedom (DOF) exoskeleton systems. The proposed method optimizes the kinematic parameters by using kinematic performance indices related to the dexterity of the human and exoskeleton system. The manipulability ellipsoid is a representative index that can confirm the dexterity of the robot. In this study, we derived the objective function considering the human body model and then optimized it using a genetic algorithm. Unlike other HRI (Human-Robot Interaction) systems, exoskeleton robots share the end-effector as well as the base of the robot with the wearer. Therefore, it is hypothesized that the proposed performance index will be highly suitable for exoskeleton systems.
-
KEYWORDS: Exoskeleton robot, Optimal design, Kinematic performance index, Human-robot interaction, Manipulability ellipsoid
-
KEYWORDS: 외골격 로봇, 최적설계, 기구학적 성능 인자, 인간-로봇 상호작용, 조작성 타원
1. 서론
외골격 로봇은 착용자와 맞닿은 상태에서 인체 동작을 모사한다는 특징에 따라 여러 산업분야에서 개발되고 있다. 그 중에서도 원격조종 분야에서는 착용자의 자세 정보를 비교적 간단하게 획득 가능하며 다양한 피드백이 가능하기 때문에 외골격 타입의 마스터 장치의 개발이 다수 이루어졌다.
1-5 하지만 기존의 외골격 로봇 설계는 작업분석에 따른 자유도 배치와 인체의 ROM (Range of Motion)을 분석하여 동작범위를 맞추는 구조에만 중점을 두고 진행된 것이 많았다.
6-8 때문에 인체의 관절구조(특히 어깨)의 복잡성으로 인해 최대한 인체 움직임에 대응하여 동작할 수 있는 외골격 구조를 위해서는 그 이상의 복잡도를 가지는 링크 구조를 요한다. 이는 외골격 시스템을 개발 및 운용하는데 있어 여러 제약(많은 관절 수에 의한 개발비용 및 제어 복잡도 증가)을 발생시키며 실제 산업 현장에 적용하기 어렵게 하는 요인이기도 하다. 따라서 본 논문에서는 산업용으로 개발되고 있는 여러 외골격 로봇 중 원격조종을 위한 외골격 시스템을 설계하는데 있어 인체와 외골격 구조의 기구학적 해석을 통하여 동작 성능을 최적화할 수 있는 설계방법론을 제시하고자 한다. Ho Shing Lo et al.
9의 경우어깨관절의 Singularity 회피를 위하여 외골격의 각 관절에 각도 제한을 두어 배치 최적화를 진행하였고, Amin Zeiaee et al.
10은 어깨관절의 작동범위를 고려하여 각 링크의 길이를 최적화하였다.
본 연구에서는 외골격 로봇이 HRI (Human-Robot Interaction) 시스템이라는 것이 착안하여 Manipulability Ellipsoid 기반의 HRI 전용 성능 인자를 개발하여 외골격의 기구학적 설계의 최적화를 이루고자 한다.
2. 외골격 로봇의 개념 설계
2.1 시스템 구성
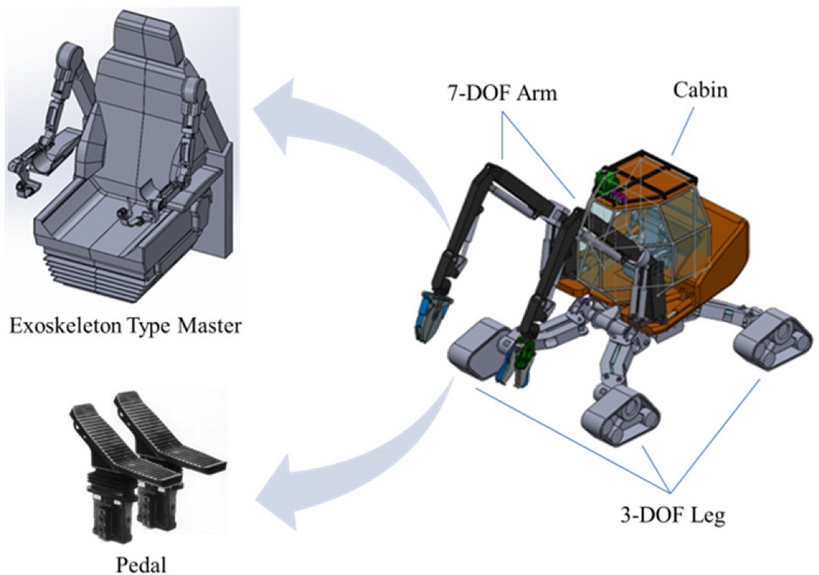
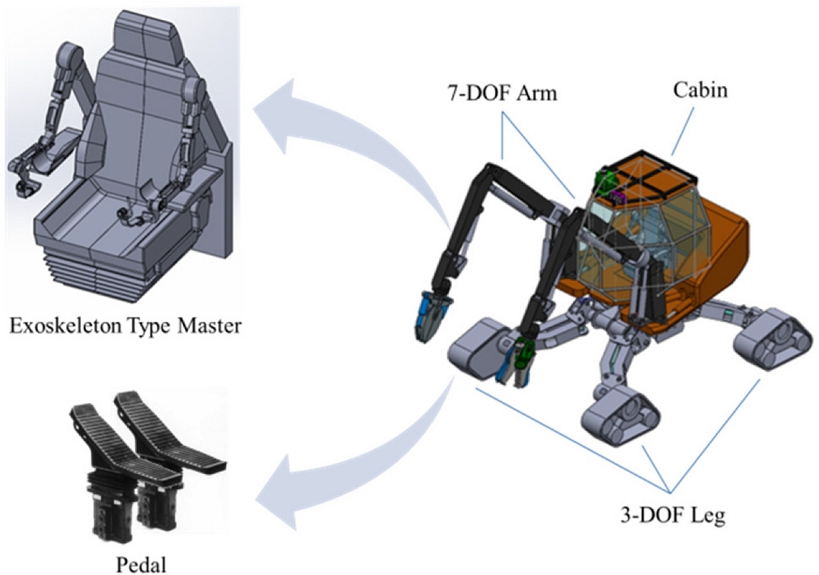
본 연구에서는 원격조종을 위한 Master 장치를 개발하고자 하며 조종하고자 하는 Slave 장치는
Fig. 1과 같다.
Fig. 1의 Slave 장치는 재난 현장(붕괴, 화재 등)의 신속한 대응을 위하여 개발된 장비로 7자유도 유압 Manipulator 2개를 사용하여 각종 장애물의 인양 및 파쇄작업을 하도록 개발되었다. 이 시스템에서 요구되는 동작은 다음과 같다.
Fig. 1Master-slave system for the special purpose machine
(1)장애물 절단
(2)장애물 인양
(3)좁은 틈 벌리기
(4)장애물 대리기/치기
(5)장애물 밀기
이 중 특히 장애물 절단은 한쪽 팔로 장애물을 든 상태에서 반대쪽 팔로 절단하는 작업이기 때문에 양팔 협조가 필요한 고난도 작업이다. 일반적인 건설장비에서 사용하고 있는 레버 형식의 조종 장치로 총 14자유도의 팔을 동시 조작하기에는 한계가 있기 때문에 본 장비의 조종은 조종자의 팔 움직임을 모사하도록 하였다. 장비의 전/후진 및 조향 입력은 캐빈 내에 설치된 페달을 통하여 조작하게 된다.
2.2 개념 설계
2.1장에서 설명한 시스템 개념을 제한 조건으로 정리하면 다음과 같다.
(1) 14자유도의 Slave 조종
(2)양팔 협업작업 가능
(3)직관적인 조종 방법(조종자의 팔 움직임 모사)
(4)조종자의 양옆에 위치(좌석 시트에 의한 제약)
(5) Force Feedback을 통한 현장감 확보
외골격 형태의 조종기를 사용함으로써 (1)부터 (3)의 조건을 만족할 수 있으며, 특히 (5)의 경우 인체와 복수의 접촉점을 가질 수 있는 외골격의 특성을 고려하였을 때보다 다양한 현장감을 줄 수 있을 것이다.
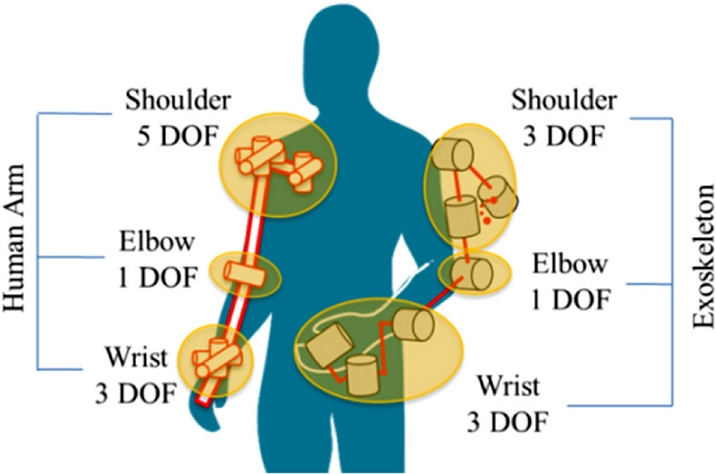
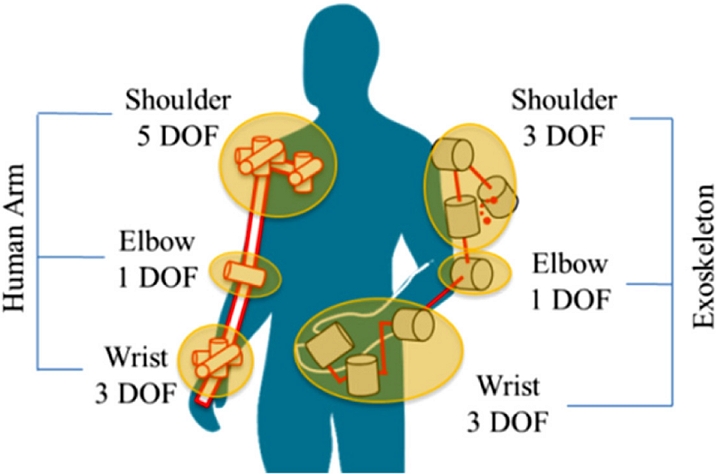
인체 동작을 모사하는 외골격 설계에 있어 기본이 되는 인체의 자유도 배치를 알아볼 필요가 있다. 일반적으로 간소화된 인체의 팔은 7자유도로 모델링된다. 어깨-팔꿈치-손목 관절에 대하여 3-1-3 또는 3-2-2자유도로 설정하는 것이 일반적이다. 복잡한 인체 관절의 동작을 구현하기 위하여 어깨관절을 5자유도 이상으로 설정하는 경우도 존재하지만 이러한 경우 인체를 감싸는 형태를 벗어날 수 없다.
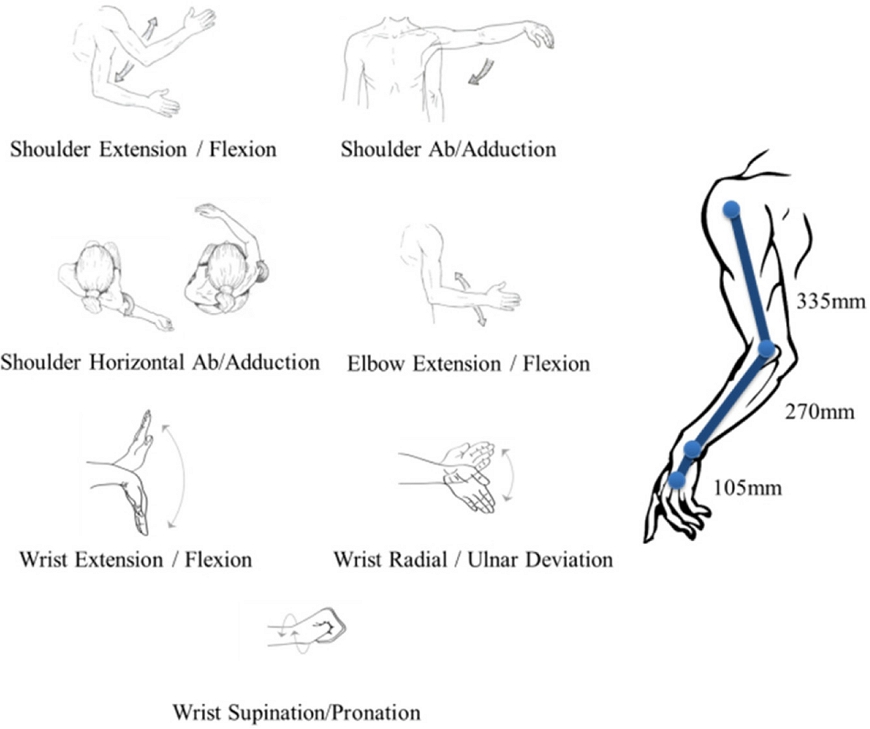
11 본 연구에서는 Master 장치의 장착 위치(좌석 시트의 양옆)를 고려하여 인체 팔 동작 모사에 대응할 수 있는 최소 자유도인 3-1-3자유도를 선택하였다. 한국인 표준에 대한 각 인체 관절의 동작 분류 및 인체 분절의 길이는
Fig. 2와 같다.
12 어깨관절의 경우 Extension/Flexion, Abduction/Adduction, Horizontal Abduction/Adduction의 3가지 동작으로 분류 가능하고, 팔꿈치 관절은 Extension/Flexion의 단일 동작으로 분류된다. 마지막으로 손목관절의 경우 Extension/Flexion, Radial Deviation/Ulnar Deviation, Supination/Pronation의 3가지 동작으로 분류된다.
Fig. 2Motion and length of a human arm
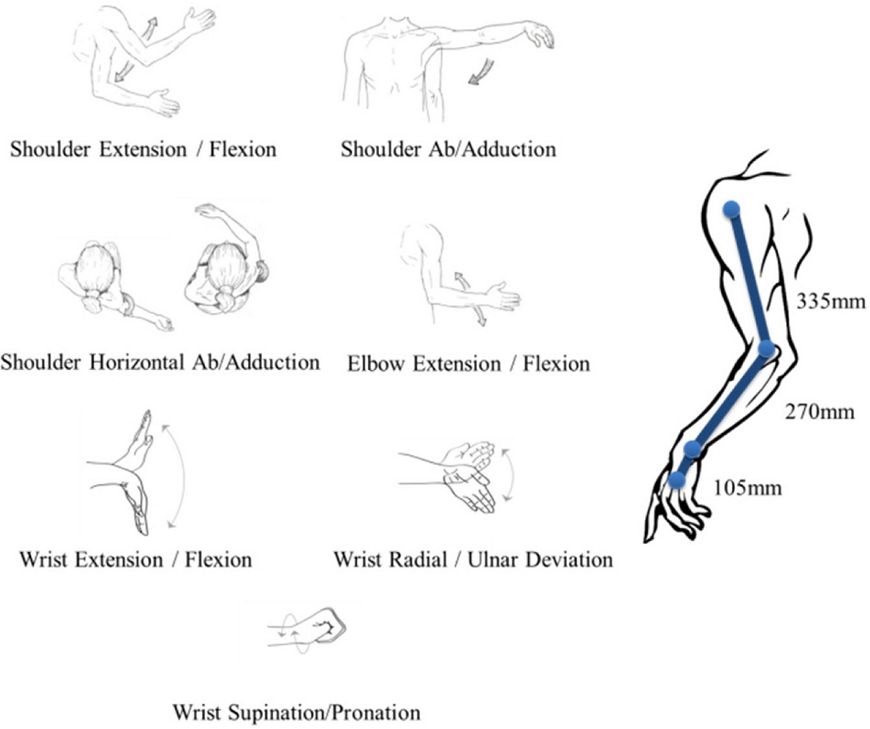
Table 1은 각 동작에 대한 범위(Range of Motion, ROM)이다.
Fig. 2에 표시된 인체 분절의 길이는 각 관절의 회전 중심 사이의 길이이다.
Table 1Range of motion of human arm
Table 1
|
Motion |
Range [°] |
|
Shoulder extension/Flexion |
188 |
|
Shoulder Ab/Adduction |
170 |
|
Shoulder horizontal Ab/Adduction |
112 |
|
Elbow extension/Flexion |
134 |
|
Wrist extension/Flexion |
185 |
|
Wrist radial/Ulnar deviation |
51 |
|
Wrist supination/Pronation |
118 |
위의 제한 조건과
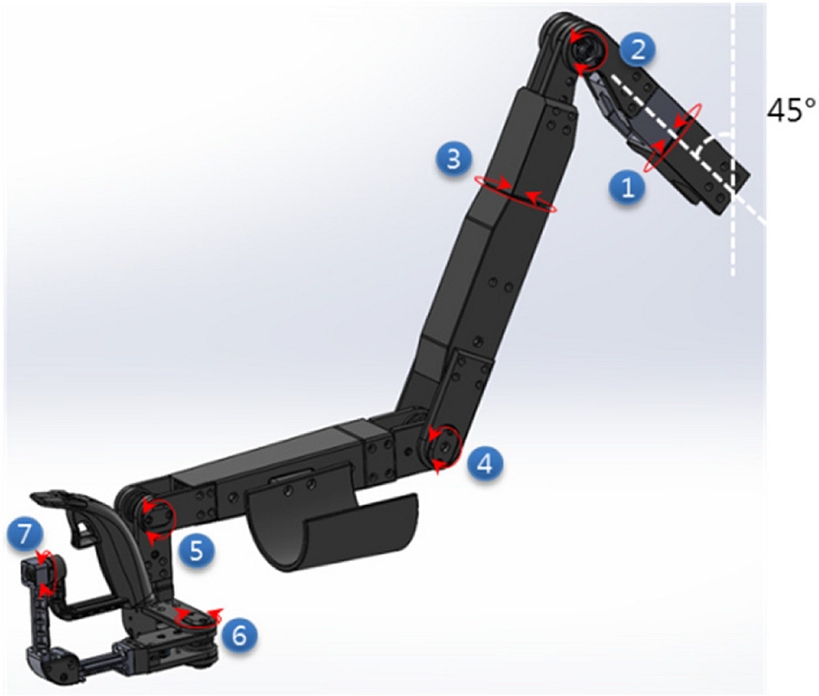
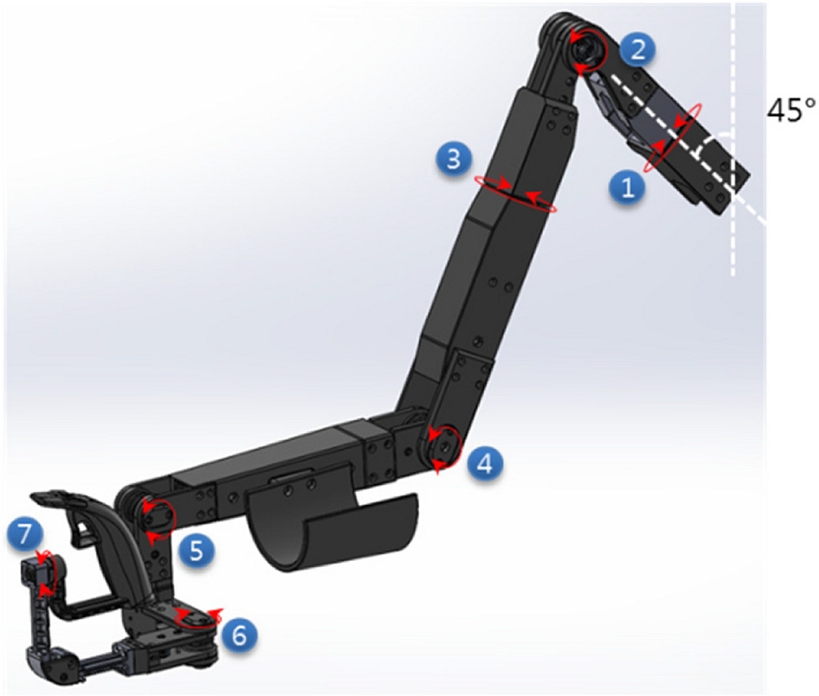
Fig. 2의 인체 정보를 활용하여 외골격의 간략한 형태를
Fig. 3과 같이 설정하였다. 1번 축은 45°를 기울여 어깨관절에서 발생할 수 있는 Singularity를 회피하도록 하였다.13 또한 4번 축과 5번 축 사이에는 별도의 체결 장치를 두어 여자유도에 의한 Singularity 회피와 2점의 Force Feedback 작용점을 확보할 수 있도록 하였다. 5-7번 축의 경우 착용자의 손목과 회전중심이 일치하도록 배치하였다.
Fig. 3Concept of the upper-limb exoskeleton
3. 성능 인자를 활용한 외골격 설계
3.1 HRI 시스템을 위한 성능 인자
Manipulability의 개발 이후 시리얼 매니퓰레이터(Serial Manipulator)의 성능평가와 설계 최적화를 위하여 다양한 성능인자(Performance Index)들이 개발되어왔다. 이러한 성능 인자들의 주요 관심사는 대상 로봇의 구동 범위나 동작 성능에 한정된 것이 많았다. 하지만 이러한 성능 인자들을 고려하여 개발되었다고 생각되는 각종 산업용 로봇들과 달리 인체의 팔은
Table 1에서 보이는 바와 같이 관절의 구동 범위가 180° 이하로 작은 경우가 많고 1개의 점에서 회전중심이 겹쳐지는 형태(어깨, 손목관절)를 지녔다. 이는 목표 작업, 구동 방식 등 여러 요인을 고려하였을 때 현재 인체의 형태가 보다 적절하기 때문일 것이라고 생각할 수 있다. 여기서 외골격 로봇의 경우, 그 목적이 인체 동작의 모사에 있으며 인체와 붙어서 움직인다는 특징이 있다. 앞서 설명한 바와 같이 이러한 특징때문에 종래의 외골격로봇은 착용자의 신체 치수를 측정하여 인체 관절과 유사한 위치에 회전중심이 위치하도록 설계하는 것이 일반적이었다. 하지만 이러한 설계 방법은 다양한 조종자에 대응할 수 있는 제품 개발에 한계가 있기 때문에 외골격 로봇의 상용화에 커다란 걸림돌이 될 것이다. 따라서 본 논문에서는 다양한 인체 치수를 가지는 조종자에 대응 가능하도록 하는 설계 최적화를 진행하려고 한다. 그러기 위해서는 서로 다른 길이와 관절 구조를 가지는 인체와 외골격 로봇을 동시에 고려할 수 있는 성능 인자의 개발이 필요하다.
Julius Klein et al.
11은 Condition Number를 활용하여 로봇의 Manipulabiliy를 최대화하는 방향으로 외골격의 성능을 향상시키고자 하였고, Yong Yu et al.
14는 하지 외골격 로봇과 인체의 Manipulabiliy Ellipsoid의 크기를 비교하여 인체의 Ellipsoid가 로봇의 Ellipsoid 내에 존재함으로써 보행 시 외골격 로봇의 동작 성능이 인체의 동작 성능 이상이 되도록 하였다. 위의 연구들에서 제시한 성능 인자는 인체 모델이 동시에 고려되지 않았거나 동작의 방향성이 아닌 Ellipsoid의 크기만을 고려하였기 때문에 이는 어느 방향으로도 잘 움직인다는 것을 의미하므로 Overdesign의 가능성이 있다.
본 연구에서는 다음
식(1)과 같은 성능 인자를 제안하고자 한다.
여기서
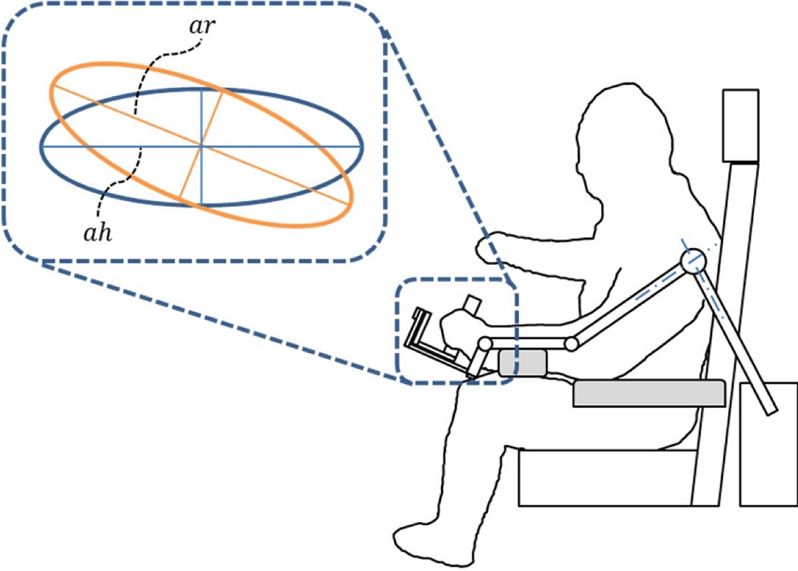
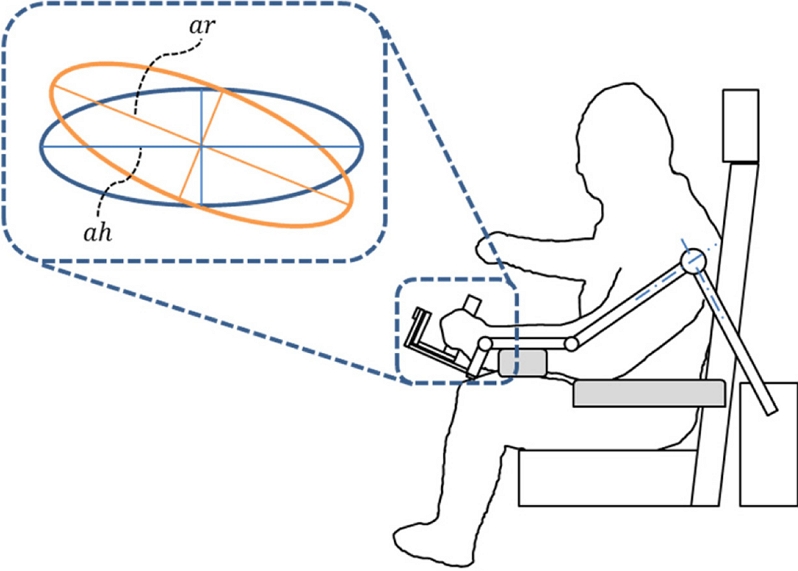
ar과
ah는 각각 외골격 로봇의 Manipulability Ellipsoid의 장축(Main Axis)과 인체 팔의 Manipulability Ellipsoid의 장축을 나타낸다. 이는
Fig. 4와 같이 특정 자세에서의 외골격과 인체의 Manipulability Ellipsoid가 이루는 각도를 비교함으로써 외골격이 인체와 유사한 동작 성능을 가지는 정도를 나타낼 수 있다. 두 장축의 단위벡터의 내적은 0 ≤
PI ≤ 1의 값을 가진다.
PI = 1인 경우, 외골격이 인체와 같은 방향으로 움직이기 쉽다는 것을 나타내므로 조종자가 움직이고자 하는 방향을 전달하는 조종 장치로써의 성능이 적합하다고 할 수 있다.
Fig. 4Concept of the performance index
3.2 목적함수 설정
일반적으로 최적화 알고리즘을 적용하기 위해서는 정해진 함수의 최소 또는 최대치를 계산하는 목적함수의 설정이 필요하다. 인체 해부학에서 인체 동작은 인체를 기준으로 3 평면으로 분할(Frontal, Sagittal, Transverse Plane)하여 해석하는 것이 일반적이다. 각 평면에서 생성되는 Manipulability Ellipsoid에 의한
PI 값과 그 범위는 아래
식(2)와 같이 정의된다.
첨자 F, S, T는 각각 Frontal, Sagittal, Transvers Plane을 의미한다. 이를 활용하여 각 평면을 포함하는 하나의 목적함수를 설정하면 다음
식(3)과 같다.
4. 7자유도 외골격 로봇의 설계 최적화
4.1 인체 및 외골격 모델링
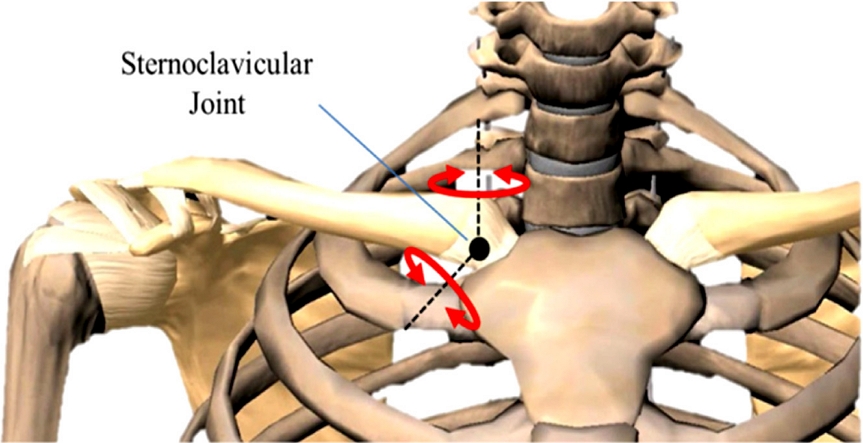
외골격 로봇의 설계 최적화에 앞서 외골격과 결합되는 인체모델에 대해 정의하고 넘어갈 필요가 있다. 2.2장의 비교적 간략한 형태의 외골격 구성을 위하여 3-1-3자유도의 팔 모델을 사용하였지만 인체의 어깨관절은 보다 복잡한 구조를 띄고 있다. 이번 절에서는 보다 최적화된 설계를 위하여 조금 더 자유도가 높은 모델을 적용시키고자 한다. 인체의 어깨관절은
Fig. 5와 같이 Sternoclavicular Joint에 의해 발생하는 추가적인 자유도가 존재한다. 이 관절을 고려하여 인체와 외골격을 모델화하면
Fig. 6의 9자유도 모델을 얻을 수 있다.
Fig. 5Sternoclavicular joint
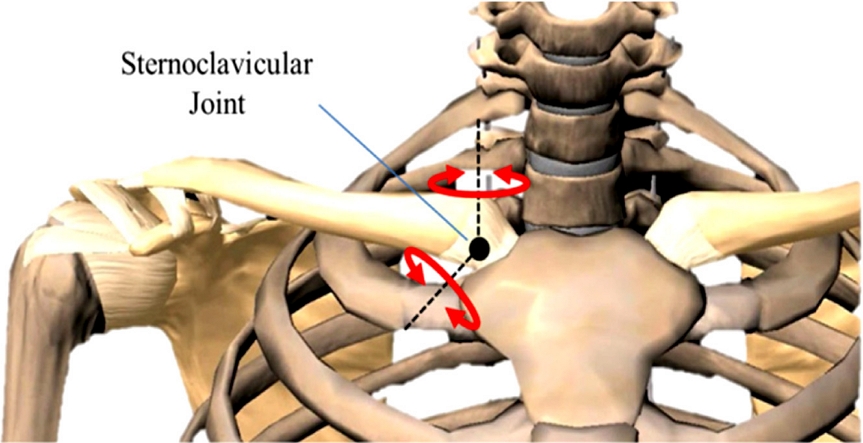
Fig. 6Kinematic model of human arm and exoskeleton
4.2 설계변수 설정
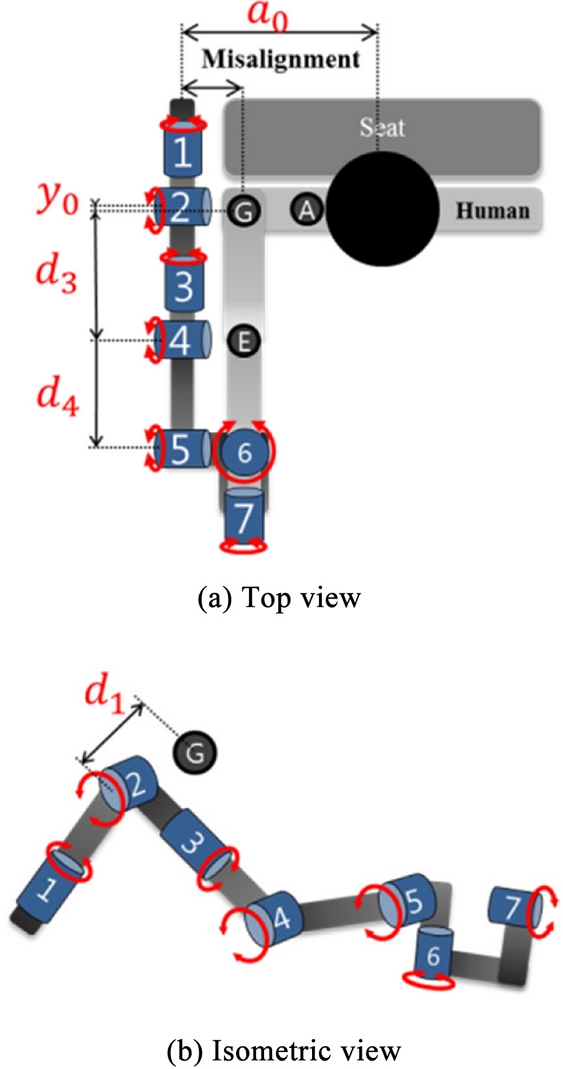
4.1장에서 구성한 모델을 기반으로 외골격 로봇의 설계변수를 선택하면
Fig. 7과 같다. 여기서 각각의 변수들은 아래와 같다.
Fig. 7Design parameter of the exoskeleton robot
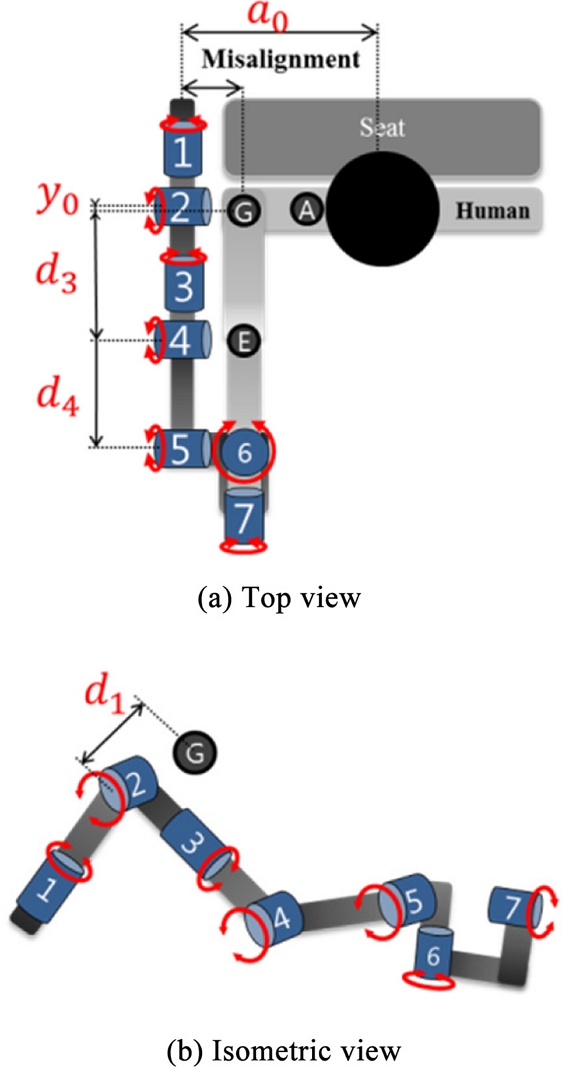
(1) a0: 몸통의 중심으로부터 1번 관절까지의 거리
(2) d1: 1번 관절과 인체 어깨관절(G) 사이의 거리
(3) d3: 2번 관절과 4번 관절 사이의 거리
(4) d4: 4번 관절과 5번 관절 사이의 거리
(5) y0: 인체 어깨관절(G)와 2번 관절 사이의 거리
이때의 각 변수의 범위 설정은 외골격 로봇이 설치되는 환경(좌석 시트의 양옆)과 성인 남성의 신체 사이즈를 고려하여 아래
식(4)와 같이 설정하였다(단위: m).
앞에서 설정한 설계변수에 대하여 MATLAB® 내의 GA (Genetic Algorithm) 최적화 툴을 활용하여 최적화를 진행하였다. 최적화 결과는
Table 2와 같다.
Table 2Optimization results of design parameters
Table 2
|
Parameters |
Initial [m] |
Optimal [m] |
|
Link parameter |
a
0
|
0.238 |
0.291 |
|
d
1
|
0.1 |
0.068 |
|
d
3
|
0.335 |
0.337 |
|
d
4
|
0.27 |
0.245 |
|
y
0
|
0 |
0 |
|
Objective function |
-mean (PI) |
- |
-0.936 |
Table 2의 결과를
Fig. 2의 한국인 표준 인체 분절 길이에 대입한 초기값(
Table 2의 초기값)과 비교하기 위하여 GCI (Global Conditioning Index)를 도입하였다. GCI는 대상 로봇의 전체 작업 공간에서의 Condition Number를 측정하여 동작 성능을 정량적으로 비교하는 것이 가능하다. GCI는 아래
식(5)와 같이 구할 수 있다.
여기서 ϰ는 Condition Number, W는 작업 영역(Work Space)을 의미한다. GCI 값은 1에 가까울수록 좋은 성능을 나타낸다. 초기값과 최적화 결과에 대한 GCI는 각각 0.413과 0.556으로 동작 성능이 약 35% 향상된 것을 알 수 있다.
5. 결론
본 연구에서는 원격조종의 마스터 장치를 목적으로 하는 외골격 로봇의 설계에 있어 다양한 착용자에 대응 가능하도록 한국인 표준 신체 사이즈를 고려한 최적화를 진행하였다. 최적화에 앞서 HRI 시스템이라고 볼 수 있는 외골격 로봇의 목적함수 설정을 위하여 Manipulability Ellipsoid를 기반으로 하는 새로운 성능 인자를 제안하였다. 제안한 성능 인자를 활용하여 외골격 링크 길이의 최적화를 진행하였고, 이를 기반으로 상세설계를 진행하였다. 다른 종류의 HRI 시스템과 달리 외골격 로봇은 End-Effector는 물론 로봇의 Base도 착용자와 공유하는 시스템이기 때문에 본 연구에서 제안한 성능 인자의 적합도가 높을 것이라고 생각된다.
ACKNOWLEDGMENTS
본 연구는 산업통상자원부의 재원으로 산업핵심기술 개발사업의 지원을 받아 수행 되었습니다(No. 10052967, 재난‧재해 대응용 특수목적기계 통합제어시스템 개발).
REFERENCES
- 1.
Frisoli, A., Salsedo, F., Bergamasco, M., Rossi, B., and Carboncini, M. C., “A Force-Feedback Exoskeleton for Upper-Limb Rehabilitation in Virtual Reality,” Applied Bionics and Biomechanics, Vol. 6, No. 2, pp. 115-126, 2009.
10.1155/2009/378254
- 2.
Folgheraiter, M., Jordan, M., Straube, S., Seeland, A., Kim, S. K., et al., “Measuring the Improvement of the Interaction Comfort of a Wearable Exoskeleton,” International Journal of Social Robotics, Vol. 4, No. 3, pp. 285-302, 2012.
10.1007/s12369-012-0147-x
- 3.
Sone, J., Inoue, R., Yamada, K., Nagae, T., Fujita, K., et al., “Development of a Wearable Exoskeleton Haptic Interface Device,” Journal of Computing and Information Science in Engineering, Vol. 8, No. 4, pp. 1-12, 2008.
10.1115/1.3009670
- 4.
Kim, Y. S., Lee, J., Lee, S., and Kim, M., “A Force Reflected Exoskeleton-Type Masterarm for Human-Robot Interaction,” IEEE Transactions on Systems, Man, and Cybernetics-Part A: Systems and Humans, Vol. 35, No. 2, pp. 198-212, 2005.
10.1109/TSMCA.2004.832836
- 5.
Letier, P., Motard, E., and Verschueren, J. P., “Exostation: Haptic Exoskeleton Based Control Station,” Proc. of the IEEE International Conference on Robotics and Automation, pp. 1840-1845, 2010.
10.1109/ROBOT.2010.5509423
- 6.
Roderick, S., Liszka, M., and Carignan, C., “Design of an Arm exoskeleton with Scapula Motion for Shoulder Rehabilitation,” Proc. of the 12th International Conference on Advanced Robotics, pp. 524-531, 2005.
- 7.
Gupta, A. and O'Malley, M. K., “Design of a Haptic Arm Exoskeleton for Training and Rehabilitation,” IEEE/ASME Transactions on Mechatronics, Vol. 11, No. 3, pp. 280-289, 2006.
10.1109/TMECH.2006.875558
- 8.
Perry, J. C., Rosen, J., and Burns, S., “Upper-Limb Powered Exoskeleton Design,” IEEE/ASME Transactions on Mechatronics, Vol. 12, No. 4, pp. 408-417, 2007.
10.1109/TMECH.2007.901934
- 9.
Lo, H. S. and Xie, S. S., “Optimization of a Redundant 4R Robot for a Shoulder Exoskeleton,” Proc. of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics, pp. 798-803, 2013.
- 10.
Zeiaee, A., Soltani-Zarrin, R., Langari, R., and Tafreshi, R., “Kinematic Design Optimization of an Eight Degree-of-Freedom Upper-Limb Exoskeleton,” Robotica, Vol. 37, No. 12, pp. 2073-2086, 2019.
10.1017/S0263574719001085
- 11.
Klein, J., Spencer, S., Allington, J., Bobrow, J. E., and Reinkensmeyer, D. J., “Optimization of a Parallel Shoulder Mechanism to Achieve a High-Force, Low-Mass, Robotic-Arm Exoskeleton,” IEEE Transactions on Robotics, Vol. 26, No. 4, pp. 710-715, 2010.
10.1109/TRO.2010.2052170
- 12.
- 13.
Letier, P., A vraam, M., V eillerette, S, .H orodinca, M., De Bartolomei, M., et al., “SAM: A 7-DOF Portable Arm Exoskeleton with Local Joint Control,” Proc. of the IEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 3501-3506, 2008.
10.1109/IROS.2008.4650889
- 14.
Yu, Y. and Liang, W., “Design Optimization for Lower Limb Assistive Mechanism based on Manipulability Inclusive Principle,” Proc. of the IEEE International Conference on Robotics and Biomimetics, pp. 174-180, 2012.
10.1109/ROBIO.2012.6490962
Biography
- Byeong Kyu Lee
Ph.D. candidate in the Department of Mechanical Engineering, Hanyang University. His research interests are in exoskeleton robot, pHRI system and teleoperation.
- Chang Soo Han
Professor in the Department of Robotics Engineering, Hanyang University. His research interests are medical service robot, future combat robot, field robot, wearable robot, path planning, construction automation robot.
Citations
Citations to this article as recorded by

- Development of a Realistic Simulator for Driving Education of a Disaster-Responding Special Purpose Machinery
Hyo-Gon Kim, Jung-Woo Park, Hyo-Jun Lee, Sung-Ho Park, Young-Ho Choi, Byeong-Kyu Lee, Jin-Ho Suh
Journal of Power System Engineering.2021; 25(2): 86. CrossRef