ABSTRACT
Estimation of the relative position between the body segments is an important task in inertial sensor-based human motion tracking. Conventionally, the relative position is determined using orientations and constant segment vectors that connect from segment to joint center, based on the assumption that the segments are rigid. However, the human body segments are non-rigid, which leads to an inaccurate relative position estimation. This paper proposes a relative position estimation method based on inertial sensor signals, considering the non-rigidity of the human bodies. Considering that the effects of non-rigidity are highly correlated with a specific variable, the proposed method uses time-varying segment vectors determined by the specific physical variable, instead of using constant segment vectors. Verification test results for an upper-body model demonstrates the superiority of the proposed method over the conventional method: The averaged root mean square error of the sternum-to-forearm estimation from the conventional method was 34.19 mm, while the value from the proposed method was 16.67 mm.
-
KEYWORDS: Relative position estimation, Non-rigidity, Wearable inertial sensor, Upper body segment
-
KEYWORDS: 상대위치 추정, 비강체성, 착용형 관성센서, 상체 분절
1. 서론
최근 헬스케어나 웰니스와 같이 일상생활에서도 인간의 건강을 관리할 수 있는 분야들이 주목받으면서, 공간의 제약없이 인체활동을 분석할 수 있는 착용형 센서 기술의 중요성이 확대되고 있는 추세이다. 본 논문이 다루는 착용형 관성센서(Inertial Sensor)는 신체에 부착함으로써 실시간으로 동작을 추적할 수 있다는 점에서 활용도가 높다. 예로, 의료 분야에서 환자의 운동 기능을 평가하거나 스포츠 분야에서의 역동적인 움직임을 분석 하기 위하여 착용형 관성센서가 활용된다.
1-4 이때 다수의 신체분절에 부착된 관성센서를 통해 인간 동작을 실시간으로 추적 가능하며, 이러한 동작추적 기술에 있어 신체 분절간 3차원 상대위치는 필수적으로 요구되는 기본 물리량이다.
5-8
관성센서를 이용하여 신체 분절간 상대위치를 추정하는 방법은 다음의 두 가지로 분류 가능하다. 첫째는 가속도 이중적분을 통한 상대위치 추정 방법으로 가속도계 신호로부터 추출된 순수 가속도 성분을 이용한다. 둘째는 자세 및 분절벡터 경유 상대위치 추정 방법으로, 신체 분절들이 구형 관절(Spherical Joint)로 연결되어 있다는 가정하에 분절 좌표계의 원점에서 관절 중심까지의 벡터(이하 분절벡터)를 결정한 후, 관성센서 신호를 통해 추정된 분절의 자세 정보와 결합하여 상대위치를 추정하는 방법이다.
가속도 이중적분 방법의 경우, 적분 시 신호의 잡음을 포함한 다양한 오차성분이 위치 추정값에 누적됨에 따라 표류오차가 쉽게 발생한다는 문제를 갖는다. 비록 표류오차를 감소시키기 위한 다양한 억제 기법들이 개발되어 왔지만, 여전히 이중적분을 통한 위치 추정에는 한계를 갖는다.
9-11 반면, 자세 및 분절벡터 경유 상대위치 추정 방법은 센서 신호의 융합 알고리즘을 통해 비교적 높은 정확도로 추정 가능한 자세 정보를 바탕으로 결정되기 때문에 이중적분에 따른 표류오차 발생 문제에 무관하다는 장점을 지닌다.
12-15 자세 및 분절벡터 경유 방법에서는 강체로 이루어진 신체 분절들이 구형 관절로 연결되어 있다는 가정하에 분절벡터를 고정 상수로 취급한다. 따라서 캘리브레이션 절차를 통해 분절벡터가 결정되고 나면 상대위치는 오직 자세 정보에 의해 결정된다.
16-18
하지만 신체 분절은 골격을 바탕으로 근육 및 피부와 같은 요소들로 감싸져 있어 신체의 동작에 따라 변형되는 비강체이다. 또한 관절들 역시 연골 및 인대 등의 연조직성에 기인하여 기계식 구형 관절과는 상이한 부분이 있다. 따라서 분절벡터는 고정되어 있지 않으며 움직임에 따라 변형 가능하다. 기존의 접근법이 이러한 인체의 비강체성을 고려하지 않고 분절벡터를 고정 상수로 취급하는 것은 위치 추정오차의 원인이 된다.
19
동작 분석과 관련한 인체의 비강체성은 광학식 모션캡처 시스템에서 주로 다뤄져 왔다. 연조직 변형(Soft Tissue Artifact)은 피부에 부착된 마커와 해부학적 지표 간의 상대적인 움직임을 발생시켜, 마커로부터 해부학적 좌표계를 정의하거나 체내 관절 각을 측정함에 있어 부정확성의 요인이 된다.
20-23 이러한 부정확성을 감소시키기 위하여 신체의 변형을 보상하거나 정량화하는 기법들이 제안되었다. 하지만 관성센서는 광학식 모션캡처 시스템과 달리 마커위치 등 위치 정보가 직접적으로 제공되지 않기 때문에 이들 방법과는 전혀 다른 접근 방식이 요구된다. 그럼에도 관성센서를 이용한 동작 분석과 관련한 인체의 비강체성은 다음과 같이 매우 드물게 연구되었다.
우선, Frick과 Rahmatalla
19는 관성센서 기반의 위치추정에 있어 분절벡터를 시변(Time-Varying)벡터로 추정하는 단일 프레임 최적화 기법을 제안하였다. 비록 관절 중심의 가속도가 매우 미미한 경우로 한정되는 한계점을 갖지만, 비강체성의 영향을 정량적으로 고려하기 위하여 관절 중심 위치를 시변화하였다는 점이 새로운 접근이다. 다음으로 본 논문의 저자인 이창준과 이정근
24은 무릎 관절을 대상으로 두 개의 분절벡터를 추정하는 칼만 필터를 제안하였다. 여기서 비강체성과 관련된 연조직 변형량은 칼만 필터의 관절 구속 조건에 연동된 측정 잡음에 반영되어 보상되었다. 하지만, 관절 구속 조건 역시 기계식 구형 관절을 가정하여 도출되는 만큼 분절의 비강체성만 제한적으로 고려된다는 한계를 지닌다.
본 논문은 착용형 관성센서 기반의 상대위치 추정에 있어, 인체의 비강체성을 고려하므로서 추정의 정확도를 향상시키는 방법을 제안한다. 인체의 비강체성을 고려하기 위하여, 제안 방법에서는 분절벡터를 고정상수로 취급하는 대신 움직임에 따라 변화하는 변수로 설계하여 실시간으로 추정하고 있다. 제안 방법의 기본적인 개념은 다음과 같다. 관절별로 분절벡터의 변동과 높은 상관관계를 갖는 변수(이하 변형 관련 변수)가 존재한다. 따라서 회귀 분석을 통하여 변형 관련 변수를 입력으로 분절벡터를 출력하는 함수를 도출할 수 있다. 일단 함수가 도출되면, 이를 이용하여 시변 분절벡터를 실시간으로 결정함으로써 비강체성의 영향을 보상하고 위치 추정의 정확도를 향상한다. 본 연구에서 제안 방법은 상체의 분절들인 흉골(Sternum), 상박(Upper Arm) 및 전박(Forearm)을 대상으로 검증되었으며, 상수 분절벡터를 사용하는 추정 방법과 비교 분석되었다.
2. 방법
2.1 관성센서 기반 상대위치 추정
제안하는 상대위치 추정법은 흉골과 상박, 전박을 대상으로 세 분절들 간의 상대위치를 추정하고자 한다. 각 분절의 해부학적 좌표계는 해당 분절에 부착된 센서의 좌표계와 동일하다고 가정하며, 위의 세 분절의 좌표계를 각각
i, j, 그리고
k로 표시한다(
Fig. 1 참조). 특정 분절 좌표계에 대한 자세는 방향 코사인 행렬로 표현되며, 예로 흉골에 대한 상박의 자세 행렬을 이용하여 다음
식(1)과 같이 3 × 1 벡터
x의 좌표계를 변환 가능하다.
Fig. 1Upper body model

여기서 벡터의 좌측 윗첨자는 벡터를 관찰한 좌표계를 의미하며, Rji는 흉골(i)에 대한 상박(j)의 상대자세를 나타내는 회전행렬이다. 상대자세행렬은 고정 관성 좌표계(I)에 대한 두 분절의 자세 인, RiI과 RjI을 이용하여 Rji=RTjIRiI로 계산되며, 각각의 자세는 센서 융합 알고리즘을 통하여 각 분절에 부착된 센서 신호로부터 추정 가능하다.
본 연구에서는 상지의 중심부에 해당하는 흉골을 기준 좌표계로 지정하며, 흉골에 대한 상박과 전박의 상대위치를 추정하고자 한다. 우선 각각의 관절을 구형 관절로 가정하였을 때, 흉골에 대한 상박의 상대위치와 상박에 대한 전박의 상대위치는 각각
식(2)와
식(3)과 같이 결정된다.
여기서 si,Si와 sj,Sj는 각각 흉골과 상박에서 어깨 관절(S)까지의 벡터이며, sj,Ej와 sk,Ek는 각각 상박과 전박에서 팔꿈치 관절(E)까지의 벡터이다.
위의 두 식을 통해 인접한 신체 분절간 상대위치가 결정되며, 흉골에 대한 전박의 상대위치는 위에서 결정된 두 상대위치
pi,ji와
pj,ki를 이용하여 다음
식(4)와 같이 결정가능하다.
위의
식(2)부터
식(4)에서의 신체 분절간 상대위치는 신체 분절들이 구형 관절로 연결되어 있다는 가정하에 결정된다. 이에 더하여 기존에는 신체 분절을 강체로 가정하였기 때문에 분절벡터를 상수로 취급하였다. 그러나 실제로 신체 분절은 변형 가능한 비강체에 해당하며, 근육이나 힘줄과 같은 연한 요소들로 연결되어 있기 때문에 위의 가정은 유효하지 않게 된다. 따라서 실제 신체의 분절벡터는 신체변형에 의해 변동되므로 상수로 결정되면 안된다. 본 연구에서는 신체변형에 따른 분절벡터의 변동을 고려하여 시변 분절벡터를 결정함으로써, 상대위치 추정에서 신체변형의 영향을 보상하는 것을 목표로 한다.
제안 방법은 앞서 언급하였듯이 분절벡터의 변동이 특정 변수와 높은 상관관계를 갖는다는 가정에 기반하므로, 변형 관련 변수에 대한 분절벡터의 양상을 추종함으로써 비강체성에 의한 변동을 고려하고자 한다. 이에 제안 방법은 회귀법을 통하여 해당 변수에 대한 분절벡터의 함수를 도출한 후에, 도출된 함수로부터 분절벡터를 결정한다.
분절벡터를 변형 관련 변수에 대한 함수로 도출하기 위해서는 학습 데이터가 필요하지만, 관절 중심 위치에 대한 정밀한 계측이 어렵기 때문에 분절벡터의 참값을 얻는 데에는 한계가 있다. 대신 본 연구에서는 추정하고자 하는 물리량이 분절벡터가 아닌 분절간 상대위치라는 점에 초점을 맞춰, 참조 상대위치와 미리 결정된 상수벡터를 이용하여 참조 상대위치를 만족하는 분절벡터를 추정한 후에 학습 데이터를 구성하였다.
본 연구에서는 어깨와 팔꿈치 관절에 인접한 분절들을 다루며, 특정 관절(
S, E ∈
J)을 기준으로 신체의 중심부에 가까운 분절(
p)과 말단부에 가까운 분절(
d)의 분절벡터가 결정되어야 한다. 예로 어깨를 기준으로 하였을 때, 흉골을 중심부, 상박을 말단부로 볼 수 있다. 참조 상대위치
pp,d,refp와 상대자세
prefdR를 이용하여, 중심부와 말단부에 대한 분절벡터를 각각 다음
식(5)와
식(6)과 같이 결정할 수 있다.
여기서
s¯는 미리 결정된 상수 분절벡터이며,
μ는 각 분절벡터의 비율을 결정하는 가중치로 0 ≤
μ ≤ 1이다. 예로
μ = 0일 경우,
s^pp=s¯p p가 되므로 중심부의 분절벡터는 선결된 상수벡터로 결정된다. 위의
식(5)와
식(6)을 통하여 회귀 분석의 학습 데이터를 구성하기 위한 분절벡터를 결정할 수 있다.
이에 더하여 분절벡터의 변동을 예측할 수 있는 변수가 요구되며, 본 연구에서는 어깨와 팔꿈치 관절이 회전 자유도를 갖는다는 점을 고려하였을 때 관절각이 변형 관련 변수로 적합하다고 판단하였다. 일반적으로 팔꿈치는 굴절/신전과 회외/회내를 하는 2자유도, 어깨 관절은 굴절/신전, 내전/외전, 그리고 내회전/외회전을 하는 3자유도 관절로 취급된다. 신체의 변형에 따른 분절벡터의 양상을 추종 가능한 회전 자유도를 고려하였을 때, 어깨와 팔꿈치 관절 모두 굴절/신전이 가장 큰 회전 범위를 가지므로, 각 관절의 굴절각을 변형 관련 변수로 선정하였다.
제안 방법은 데이터를 기반으로 변수 간의 상관관계를 도출하는 비모수적(Non-Parametric) 회귀법인 커널(Kernel) 회귀를 이용한다.
25 관절
J에 대한 분절벡터의 함수를 도출하기 위해 변형 관련 변수를 관절의 굴절각(
xJ =
αJ)으로, 관측값은 분절벡터(
yJs^p,JTps^d,JTdT )로 지정한다. 관절
J의 굴절각과 분절벡터 간의 상관관계는 다음
식(7)과 같이 모델링된다.
여기서
f는 굴절각에 대한 분절벡터의 함수이며,
ε는 오차항이다. 커널 회귀는 학습 데이터로부터
식(7)의 모델에 가장 적합한 비선형 함수
f *(
xJ,t)를 도출하며, 도출된 함수를 이용하여 이산시간
t에서 계측된
αJ,t로부터 분절벡터
sp,J,tp와
sd,J,td를 결정 가능하다. 이에 사용된 커널 회귀의 자세한 절차는 Ref. 25를 참고하였다.
25
이로써 어깨와 팔꿈치에 대한 시변 분절벡터들이 결정되며, 결정된 분절벡터들을
식(2)와
식(3)에 대입함으로써 인체의 비강체성을 고려한 상대위치 추정이 이뤄진다.
3. 결과 및 고찰
3.1 검증 실험
제안하는 상대위치 추정법의 성능을 검증하기 위해 3축 가속도계(측정범위: ±160 m/s
2), 3축 자이로스코프(측정범위: ±1,200 deg/s), 그리고 3축 지자기센서(측정범위: ±1.5 Gauss)를 포함하는 관성센서 모듈인 R MTw (Xsens Technologies B.V.)가 사용되었다. 여기서 각 센서를 통해 측정된 가속도, 각속도 및 지구 자기장 신호는 해당 분절의 자세 추정을 위한 입력 신호로 사용되었다. 각 MTw는 벨크로 스트랩을 이용하여
Fig. 2와 같이 흉골과 왼쪽 상박 및 전박의 측면에 부착되었으며, 센서의 축 방향은
Fig. 1에 표기된 좌표계의 축 방향과 동일하다. X축은 빨간색, Y축은 초록색, 그리고 Z축은 파란색 축에 해당한다. 제안방법의 성능을 검증하기 위하여 광학식 모션캡쳐 시스템인 OptiTrack Flex13(Natrual Point)을 통해 참조 상대위치와 자세를 제공받았다. 두 시스템의 샘플링률은 모두 100 Hz로 설정하였으며, 정적 시험 조건에서의 두 시스템간 자세 비교를 통하여 자세의 RMSE (Root Mean Squared Error)가 최소가 되도록 시간축을 조절하여 동기화를 진행하였다. 모션캡쳐 시스템을 통해 센서의 참조 좌표계를 계측하기 위해 각 센서를 3개의 마커가 부착된 마커 클러스터에 좌표계가 일치하도록 고정하였다.
Fig. 2Experimental setup

제안 방법의 개념 증명 단계로써, 검증 실험은 2명의 건강한 27세 남성 피실험자만을 대상으로 진행하였다(피실험자 1과 2의 키와 몸무게는 각각 172와 173 cm 그리고 70와 74kg).
Table 1은 두 피실험자에 대한 상수 분절벡터를 보여준다. 검증 실험은 상체의 네 가지 특정 동작을 반복하여 진행되었으며,
Fig. 3은 각 Test에 대한 동작들을 보여준다. 각 Test는 2분 동안 총 5번의 시행으로 진행되었으며, 그 중 첫 번째 시행의 데이터는 회귀 학습 데이터로, 나머지는 검증용 데이터로 사용되었다. 따라서 제안 방법은 Tests 1부터 4의 첫 번째 시행 데이터를 학습한 후에 나머지 데이터들에 대하여 검증이 이루어졌다.
Table 1
Pre-determined constant segment vectors
(Unit: mm)
Table 1
|
Subject 1 |
X |
Y |
Z |
|
Sternum-to-shoulder |
154.21 |
166.59 |
-92.84 |
|
Upper arm-to-shoulder |
106.57 |
-4.96 |
-77.97 |
|
Upper arm-to-elbow |
-170.09 |
-23.47 |
-33.90 |
|
Forearm-to-elbow |
218.60 |
3.98 |
-39.24 |
|
Subject 2 |
X |
Y |
Z |
|
Sternum-to-shoulder |
145.33 |
166.99 |
-64.67 |
|
Upper arm-to-shoulder |
129.53 |
-53.91 |
-63.90 |
|
Upper arm-to-elbow |
-119.70 |
-1.59 |
-34.83 |
|
Forearm-to-elbow |
226.93 |
12.54 |
-37.22 |
Fig. 3Test motions

제안하는 상대위치 추정법의 성능을 검증하기 위하여, 세 가지의 비교방법들을 비교 분석하였다. 첫 번째 방법(M1)은 참조 자세와 상수 분절벡터를 이용하여 상대위치를 추정하는 방법이다. M1의 추정오차 발생은 온전히 신체변형에 따른 분절벡터의 변동에 기인하므로, 제안 방법을 통해 보상하고자 하는 대상으로 볼 수 있다. 두 번째 방법(M2)과 세 번째 방법(M3)은 시변 분절벡터를 이용하는 본 논문 제안 방법으로, M2는 참조 자세를, M3은 추정된 자세를 사용하며, 분절벡터를 결정하는 과정에서 M2는 참조 자세로부터 추출된 관절각을, M3은 추정된 관절각을 사용한다. M2는 시변 분절벡터의 사용에 따른 비강체성의 보상 효과만을 평가하기 위하여 선정되었다
M3에 적용된 자세 추정법은 Ref. 12에서 제안된 모델 기반의 외란 보상법이 사용되었으며, 상수 분절벡터는 광학식 모션캡쳐 시스템을 기반으로 하는 Ref. 18의 최적화 기법을 통하여 결정되었다.
3.2 결과 및 고찰
Table 2는 두 명의 피실험자에 대한 Tests 1부터 4에서의 평균 RMSE를 보여준다. 여기서 각 Test에 대한 RMSE는 4개의 데이터에 대한 평균 RMSE에 해당한다.
Table 3은 M3에 사용된 상대자세, 즉 관절각 추정의 평균 RMSE를 보여준다.
Figs. 4와
5는 피실험자 1에 대하여 각각 Tests 1과 4에서의 추정 결과를,
Fig. 6은 Test 4에서 M1과 M2를 통해 추정된 흉골-전박의 궤적을,
Fig. 7은
si,Si의 회귀 결과를 보여주는 그래프이다.
Table 2
Averaged RMSE of relative position estimation
(Unit: mm)
Table 2
|
Sternum-to-upper arm |
Upper arm-to-forearm |
Sternum-to-forearm |
|
Subject 1 |
M1 |
M2 |
M3 |
M1 |
M2 |
M3 |
M1 |
M2 |
M3 |
|
Test 1 |
16.60 |
9.31 |
9.16 |
9.72 |
8.29 |
10.59 |
24.67 |
16.18 |
20.55 |
|
Test 2 |
12.85 |
5.21 |
5.04 |
12.17 |
7.99 |
9.46 |
26.72 |
7.61 |
12.68 |
|
Test 3 |
27.77 |
6.98 |
7.90 |
13.90 |
8.67 |
10.26 |
41.90 |
11.42 |
17.15 |
|
Test 4 |
35.42 |
6.96 |
8.60 |
15.45 |
8.33 |
9.73 |
53.73 |
15.48 |
22.54 |
|
Subject 2 |
M1 |
M2 |
M3 |
M1 |
M2 |
M3 |
M1 |
M2 |
M3 |
|
Test 1 |
23.68 |
12.94 |
11.80 |
7.34 |
8.23 |
5.65 |
29.26 |
18.00 |
13.43 |
|
Test 2 |
11.02 |
10.44 |
9.50 |
8.04 |
5.10 |
10.52 |
17.82 |
12.56 |
14.64 |
|
Test 3 |
36.56 |
9.41 |
10.23 |
7.82 |
6.45 |
9.07 |
37.90 |
10.46 |
13.79 |
|
Test 4 |
39.79 |
9.22 |
10.28 |
10.99 |
8.81 |
10.18 |
41.55 |
13.94 |
18.60 |
Table 3
Averaged RMSE of joint angle estimation
(Unit: °)
Table 3
|
Subject 1 |
Subject 2 |
|
Shoulder |
Elbow |
Shoulder |
Elbow |
|
Test 1 |
1.97 |
1.97 |
2.35 |
1.84 |
|
Test 2 |
1.23 |
1.50 |
1.87 |
3.75 |
|
Test 3 |
1.79 |
1.46 |
2.11 |
1.35 |
|
Test 4 |
2.13 |
2.63 |
2.27 |
2.77 |
Fig. 4Estimation results of Test 1 from Subject 1: (a) Sternum-to-upper arm, (b) Upper arm-to-forearm, and (c) Sternum-to-forearm

Fig. 5Estimation results of Test 4 from Subject 1: (a) Sternum-to-upper arm, (b) Upper arm-to-forearm, and (c) Sternum-to-forearm
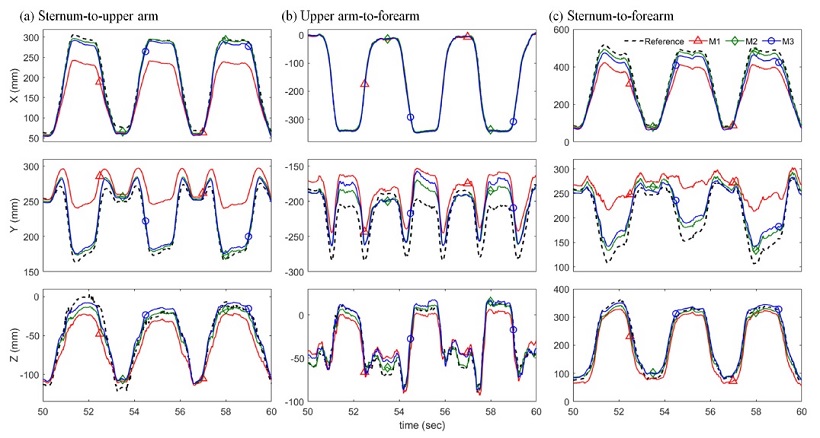
Fig. 6Estimated sternum-to-forearm trajectories from M1 (Red) and M2 (Blue) with respect to the truth reference (Black) of Test 4 from Subject 1

Fig. 7Regression result of sternum-to-shoulder vector

Table 2에서 확인할 수 있듯이 대부분의 Test에서 시변 분절 벡터를 사용하는 M2와 M3이 상수 벡터를 사용하는 M1에 비해 우수한 추정성능을 보였다. M1의 경우 두 명의 피실험자에 대하여
pi,ji와
pj,kj에서 평균 RMSE가 각각 25.46과 10.68 mm로,
pi,ji에서 비교적 큰 수준의 오차를 나타냈다. M2와 M3은
pi,ji에서 각각 16.65와 16.60 mm만큼의 우세폭을 나타낸 반면,
pj,kj에서는 두 방법 모두 평균 3 mm 이하로 미미한 수준의 우세폭을 나타냈다. 앞의 두 추정 결과가 결합된
pi,ki의 경우, M1의 평균 RMSE는 34.19 mm였으며, M2와 M3은 평균 20.99와 17.52 mm로 향상된 추정 결과를 보였다.
Figs. 4와
5에서 확인할 수 있듯이, 상수 분절벡터를 사용하는 M1은 비강체성의 영향을 크게 받았으며, 관절과 동작별로 그 차이가 드러났다. M1의 추정오차는 온전히 인체의 비강체성에 기인된다는 점을 고려하였을 때, 어깨 관절로 연결된 흉골-상박에서의 변형이 팔꿈치로 연결된 상박-전박에 비해 비교적 큰 수준으로 발생한 것으로 판단된다. 이는 어깨 관절이 팔꿈치 관절 보다 비교적 복잡한 자유도를 가진다는 점과 관련성이 있다. 또한 동작의 종류에 따라 신체, 특히 피부의 외형에 나타나는 영향이 상이하기 때문에, 동작에 따른 상이한 경향은 당연한 결과로 여겨질 수 있다.
반면, 제안된 M2와 M3은 분절벡터를 시변 처리함으로써 M1의 추정 결과에서 드러난 비강체성의 영향을 보상하였다.
Fig. 6에서 M1과 M2의 흉골-전박 궤적을 비교하였을 때, M2가 M1에 비해 참조 궤적에 근접하였으며, 이는 시변 분절벡터를 통한 비강체성의 보상 효과를 보여준다.
Fig. 7에서 보이듯, 제안 방법은 상수의 분절벡터(검정 파선)와 달리 비선형성을 나타내는 분절벡터의 함수(빨강 실선)를 도출하여 분절벡터를 시변으로 결정하도록 하였다. 즉, 기존 방법인 M1은 동작에 따라서 변동되는 분절벡터를 상수로 취급하였기 때문에 부정확한 추정으로 이어진 반면, 제안 방법은 분절벡터의 양상을 추종함으로써 비강체성에 의한 분절벡터의 변동을 고려하였다.
관성센서 신호로부터 추정된 자세를 사용하는 M3의 경우, 참조 자세를 사용하는 M2에 비해 저하된 성능을 보였다. 이는 자세의 추정오차 발생에 기인한 것으로,
Table 3에 보여지는 자세의 추정 RMSE와 연관된다. 자세 추정오차는 상대위치를 계산하는 과정뿐 아니라 분절벡터를 결정하는 과정에서도 영향을 끼치기 때문에, 피실험자 2의 Test 2와 같이 자세 추정오차가 큰 경우 상대위치 추정성능 저하를 야기한다. 그럼에도 불구하고, 모든 Test에 대하여 평균 0.98 mm의 성능 저하를 나타냈으며, 보상 효과의 측면에서 보았을 때 크게 저하된 수준은 아닌 것으로 판단된다.
제안 방법의 검증 실험은 두 명의 피실험자에 대해서만 이뤄졌기 때문에 검증 결과를 일반화하기 어렵지만, 개념 증명 단계로써 제안 방법의 비강체성 보상에 대한 효과를 확인하였다. 추후 연구에서는 다양한 연령과 성별에 대해 검증하므로써, 비강체성 보상 효과를 통계적으로 분석할 예정이다.
앞의 결과를 통해 제안 방법의 보상 효과는 확인되었지만, 여전히 비강체성의 영향으로 인하여 추정오차가 발생하였다. 제안 방법은 학습 데이터로부터 평균적인 분절벡터의 양상을 추종하여 분절벡터를 결정하므로, 비강체성의 세세한 영향을 모두 고려할 수는 없는 한계를 갖는다. 본 연구가 검증한 상체 분절의 경우, 굴절각을 통해 다양한 종류의 비강체성을 모두 반영할 수 없음을 의미한다.
4. 결론
본 논문에서는 인체의 비강체성을 고려한 착용형 관성센서 기반의 상체 분절간 상대위치 추정 방법을 제안하였다. 관절별로 분절벡터의 변동과 높은 상관성으로 갖는 변수를 선정하고, 회귀 분석을 통하여 변형 관련 변수와 분절벡터를 연동시키는 함수를 도출하였다. 도출된 함수를 이용하여, 분절벡터를 고정 상수로 취급하는 대신 움직임에 따라 변화하는 시변수로 실시간으로 추정하였다. 제안 방법의 성능은 상체 분절인 흉골, 상박 및 전박을 대상으로, 고정 분절벡터를 사용하는 기존 방법과 비교 분석하여 검증되었다. 예를 들어 검증 결과에서 흉골-하박간 상대위치 RMSE는 기존 방법(M1) 34.19 mm 및 제안 방법(M3) 16.67 mm로, 17.52 mm 즉 51% 감소를 보이는 등, 제안 방법은 기존 방법 대비 우수한 추정성능을 보였다. 특히 변형 수준이 큰 흉골-상박에서 비강체성의 영향을 우수하게 보상하였음을 확인하였다.
제안 방법은 학습 데이터로부터 분절벡터를 변형 관련 변수에 대한 함수로 도출함으로써 시변 분절벡터를 결정하기 때문에, 그에 따른 보상 효과는 변수의 선정과 밀접하게 연관된다. 따라서 관절별로 신체변형을 보다 정확하게 고려할 수 있는 변형 관련 변수의 분석 및 선정에 관한 보완연구가 필요하다. 또한 본 연구에서는 상체 분절에 대해서만 검증되었기 때문에 추후에는 하체를 대상으로 한 연구가 진행될 계획이다.
ACKNOWLEDGMENTS
이 논문은 2018년도 정부(교육부)의 재원으로 한국연구재단 기초연구사업(No. NRF-2018R1D1A1B07042791)의 지원을 받아 수행됨.
REFERENCES
- 1.
Díaz, S., Stephenson, J. B., and Labrador, M. A., “Use of Wearable Sensor Technology in Gait, Balance, and Range of Motion Analysis,” Applied Sciences, Vol. 10, No. 1, pp. 234(1)-234(39), 2020.
10.3390/app10010234
- 2.
El-Gohary, M., Pearson, S., McNames, J., Mancini, M., Horak, F., et al., “Continuous Monitoring of Turning in Patients with Movement Disability,” Sensors, Vol. 14, No. 1, pp. 356-369, 2014.
10.3390/s140100356
- 3.
Fasel, B., Spörri, J., Schütz, P., Lorenzetti, S., and Aminian, K., “Validation of Functional Calibration and Strap-Down Joint Drift Correction for Computing 3D Joint Angles of Knee, Hip, and Trunk in Alpine Skiing,” PloS One, Vol. 12, No. 7, Paper No. e0181446, 2017.
10.1371/journal.pone.0181446
- 4.
Nagahara, R., Kameda, M., Neville, J., and Morin, J. B., “Inertial Measurement Unit-Based Hip Flexion Test as an Indicator of Sprint Performance,” Journal of Sports Sciences, Vol. 38, No. 1, pp. 53-61, 2020.
10.1080/02640414.2019.1680081
- 5.
Schepers, H. M., Roetenberg, D., and Veltink, P. H., “Ambulatory Human Motion Tracking by Fusion of Inertial and Magnetic Sensing with Adaptive Actuation,” Medical & Biological Engineering & Computing, Vol. 48, No. 1, pp. 27-37, 2010.
10.1007/s11517-009-0562-9
- 6.
Kok, M., Hol, J. D., and Schön, T. B., “An Optimization-Based Approach to Human Body Motion Capture Using Inertial Sensors,” IFAC Proceedings Volumes, Vol. 47, No. 3, pp. 79-85, 2014.
10.3182/20140824-6-ZA-1003.02252
- 7.
Song, K. W., Song, Y. E., and Jung, H., “IMU Based Walking Position Tracking Using Kinematic Model of Lower Body and Walking Cycle Analysis,” Journal of the Korean Society for Precision Engineering, Vol. 35, No. 10, pp. 965-972, 2018.
10.7736/KSPE.2018.35.10.965
- 8.
Zhou, H., Hu, H., Harris, N. D., and Hammerton, J., “Applications of Wearable Inertial Sensors in Estimation of Upper Limb Movements,” Biomedical Signal Processing and Control, Vol. 1, No. 1, pp. 22-32, 2006.
10.1016/j.bspc.2006.03.001
- 9.
Thong, Y., Woolfson, M., Crowe, J., Hayes-Gill, B., and Jones, D., “Numerical Double Integration of Acceleration Measurements in Noise,” Measurement, Vol. 36, No. 1, pp. 73-92, 2004.
10.1016/j.measurement.2004.04.005
- 10.
Gulmammadov, F., “Analysis, Modeling and Compensation of Bias Drift in MEMS Inertial Sensors,” Proc. of the 4th International Conference on Recent Advances in Space Technologies, pp. 591-596, 2009.
10.1109/RAST.2009.5158260
- 11.
Gilbert, H. B., Celik, O., and O'Malley, M. K., “Long-Term Double Integration of Acceleration for Position Sensing and Frequency Domain System Identification,” Proc. of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics, pp. 453-458, 2010.
10.1109/AIM.2010.5695927
- 12.
Lee, J. K., “A Parallel Attitude-Heading Kalman Filter without State-Augmentation of Model-Based Disturbance Components,” IEEE Transactions on Instrumentation and Measurement, Vol. 68, No. 7, pp. 2668-2670, 2019.
10.1109/TIM.2019.2906417
- 13.
Zihajehzadeh, S., Loh, D., Lee, M., Hoskinson, R., and Park, E., “A Cascaded Two-Step Kalman Filter for Estimation of Human Body Segment Orientation Using MEMS-IMU,” Proc. of the 36th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, pp. 6270-6273, 2014.
10.1109/EMBC.2014.6945062
- 14.
Suh, Y. S., “Orientation Estimation Using a Quaternion-Based Indirect Kalman Filter with Adaptive Estimation of External Acceleration,” IEEE Transactions on Instrumentation and Measurement, Vol. 59, No. 12, pp. 3296-3305, 2010.
10.1109/TIM.2010.2047157
- 15.
Jang, T., Kim, Y., and Jang, T., “The Comparison of Attitude Estimation Method based on Kalman Filter with Considering External Acceleration and Bias Effect,” Journal of the Korean Society for Precision Engineering, Vol. 35, No. 8, pp. 745-752, 2018.
10.7736/KSPE.2018.35.8.745
- 16.
Seel, T., Schauer, T., and Raisch, J., “Joint Axis and Position Estimation from Inertial Measurement Data by Exploiting Kinematic Constraints,” Proc. of the IEEE International Conference on Control Applications, pp. 45-49, 2012.
10.1109/CCA.2012.6402423
- 17.
McGinnis, R. S. and Perkins, N. C., “Inertial Sensor Based Method for Identifying Spherical Joint Center of Rotation,” Journal of Biomechanics, Vol. 46, No. 14, pp. 2546-2549, 2013.
10.1016/j.jbiomech.2013.07.017
- 18.
Cameron, J. and Lasenby, J., “A Real-Time Sequential Algorithm for Human Joint Localization,” Proc. of the International Conference on Computer Graphics and Interactive Techniques, p. 107-es, 2005.
10.1145/1186954.1187076
- 19.
Frick, E. and Rahmatalla, S., “Joint Center Estimation Using Single-Frame Optimization: Part 1: Numerical Simulation,” Sensors, Vol. 18, No. 4, pp. 1089(1)-1089(7), 2018.
10.3390/s18041089
- 20.
Benoit, D. L., Ramsey, D. K., Lamontagne, M., Xu, L., Wretenberg, P., et al., “Effect of Skin Movement Artifact on Knee Kinematics during Gait and Cutting Motions Measured in Vivo,” Gait & posture, Vol. 24, No. 2, pp. 152-164, 2006.
10.1016/j.gaitpost.2005.04.012
- 21.
Benoit, D. L., Damsgaard, M., and Andersen, M. S., “Surface Marker Cluster Translation, Rotation, Scaling and Deformation: Their Contribution to Soft Tissue Artefact and Impact on Knee Joint Kinematics,” Journal of biomechanics, Vol. 48, No. 10, pp. 2124-2129, 2015.
10.1016/j.jbiomech.2015.02.050
- 22.
Cappello, A., Stagni, R., Fantozzi, S., and Leardini, A., “Soft Tissue Artifact Compensation in Knee Kinematics by Double Anatomical Landmark Calibration: Performance of a Novel Method during Selected Motor Tasks,” IEEE Transactions on biomedical engineering, Vol. 52, No. 6, pp. 992-998, 2005.
10.1109/TBME.2005.846728
- 23.
Andersen, M. S., Damsgaard, M., Rasmussen, J., Ramsey, D. K., and Benoit, D. L., “A Linear Soft Tissue Artefact Model for Human Movement Analysis: Proof of Concept Using in Vivo Data,” Gait & Posture, Vol. 35, No. 4, pp. 606-611, 2012.
10.1016/j.gaitpost.2011.11.032
- 24.
Lee, C. J. and Lee, J. K., “Relative Position Estimation Using Kalman Filter based on Inertial Sensor Signals Considering Soft Tissue Artifacts of Human Body Segments,” Journal of Sensor Science and Technology, Vol. 29, No. 4, pp. 237-242, 2020.
10.46670/JSST.2020.29.4.237
- 25.
Nadaraya, E. A., “On Estimating Regression,” Theory of Probability & Its Applications, Vol. 9, No. 1, pp. 141-142, 1964.
10.1137/1109020
Biography
- Chang June Lee
M.Sc. candidate in the Department of Mechanical Engineering, Hankyong National University. His research interests include IMU-based human motion tracking and joint torque estimation as well as wearable robotics.
- Jung Keun Lee
Professor in the School of ICT, Robotics & Mechanical Engineering, Hankyong National University. His research interests include inertial sensing-based human motion tracking, biomechatronics, wearable sensor applications, and system dy-namics and control.












