ABSTRACT
In this study, we designed and manufactured a 3-axis force sensor for an intelligent gripper that safely grips an unknown object. The 3-axis force sensor consists of an Fx force sensor, an Fy force sensor, and an Fz force sensor in one body, and is manufactured by attaching a strain gauge. The characteristics evaluation showed that the rated output error was within 0.2, the nonlinearity error was within 0.05, and the reproducibility error was within 0.06%. Therefore, the 3-axis force sensor designed and manufactured in this study can be used to measure weight and control the force used to grip an unknown object by attaching it to the intelligent gripper.
-
KEYWORDS: 3-Axis force sensor, Intelligent gripper, Intelligent robot, Strain gage, Rated output, Nonlinearity error, Reproducibility error
-
KEYWORDS: 3축 힘센서, 지능형 그리퍼, 지능로봇, 스트레인 게이지, 정격출력, 비직선성 오차, 재현성 오차
1. 서론
다양한 공장에서 생산하기 전의 다양한 소재들과 완성품들이 있고, 슈퍼마켓 등에는 부서지기 쉬운 것부터 딱딱한 것 등의 다양한 종류의 물체가 많이 진열되어 있다. 이와 같은 다양한 물체는 무게를 대부분 다르고 크기도 다르므로 현재의 로봇 그리퍼
[1-
12]가 안전하게 잡기가 어렵다. 현재의 로봇 그리퍼는 공압식, 전기식 등으로 구성되었는데, 이것들은 잡는 물체가 정해지면 잡는 힘을 공압식 그리퍼는 적당한 공기압을 공급하도록 조정하고, 전기식은 모터에 공급되는 전류값을 결정해준다. 즉, 이와 같은 그리퍼들은 잡는 힘을 결정해주기 때문에 정해진 그 물체만을 잡아 들을 수 있다.
그러나 일반 그리퍼가 무게를 알 수 없는 미지물체는 처음 잡을 때는 얼마 정도의 힘으로 잡아야 되는지의 잡는 힘을 결정할 수 없다. 그래서 3축 힘센서가 부착된 그리퍼가 물체를 잡아드는 순간 무게를 측정하고 물체의 무게에 따라 잡는 힘을 스스로 결정하는 방법으로 안전하게 잡을 수 있을 것이다. 그러기 위해서는 3축 힘센서가 필요하다.
다축 힘센서
[13-
16]는 다양한 크기, 다양한 용량으로 개발되었으나 이것들은 그리퍼의 손가락에 부착하기에는 크기와 용량 등이 적합하지 않다. 즉, 그리퍼는 가벼워야 하고 크기가 작아야 하는데, 현재 개발된 다축 힘센서들은 그리퍼의 작은 손가락에 부착하기가 매우 어렵다. 그러므로 지능형 그리퍼에 부착되는 3축 힘센서는 크기 및 용량 등을 고려하여 한 몸체로 작게 설계되어야 한다.
논문에서는 지능형 그리퍼에 부착되어 미지물체를 안전하게 잡는 3축 힘센서(Fx 힘센서, Fy 힘센서, Fz 힘센서)를 그리퍼 손가락에 한 몸체로 설계 및 제작하였다. 3축 힘센서의 감지부를 설계하였고, 소프트웨어를 이용하여 감지부의 크기를 결정하였으며, 각 센서의 감지부에 스트레인 게이지를 부착하여 제작하였다. 그리고 제작한 3축 힘센서를 특성 실험을 실시하였다.
2. 지능형 그리퍼의 3축 힘센서 설계
2.1 지능형 그리퍼의 3축 힘센서의 구조
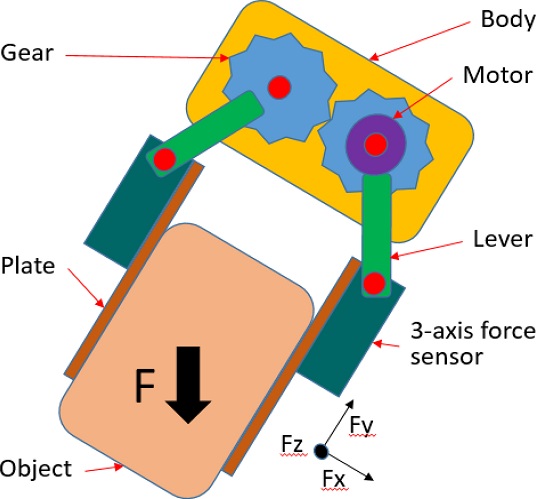
Fig. 1은 3축 힘센서가 부착된 지능형 그리퍼가 물체를 잡는 원리를 나타내고 있고, 이것은 몸체(Body), 3축 힘센서(3-Axis-Force Sensor), 레버(Lever), 기어(Gear), 모터(Motor), 손가락 판(Finger Plate) 등으로 구성된다. 몸체에 고정되어 있는 모터가 회전하면 기어가 회전함에 따라 양쪽의 레버가 안쪽 혹은 바깥쪽으로 동시에 움직이므로 손가락 판이 물체를 잡을 수 있다. 그리퍼가 3축 힘센서의 잡는 방향의 힘센서를 이용하여 1 N의 작은 힘으로 물체를 잡아드는 순간 3축 힘센서로 중력 방향의 물체의 무게를 측정하며, 무게에 따라 잡는 힘을 증가 및 감소를 결정함과 동시에 그 힘으로 잡는다. 그러면 미지물체를 안전하게 접을 수 있다. 물체의 무게를 계산하는 식은 다음
식(1)과 같이 표현할 수 있다.
Fig. 1Structure of 3-axis force sensor for intelligent gripper
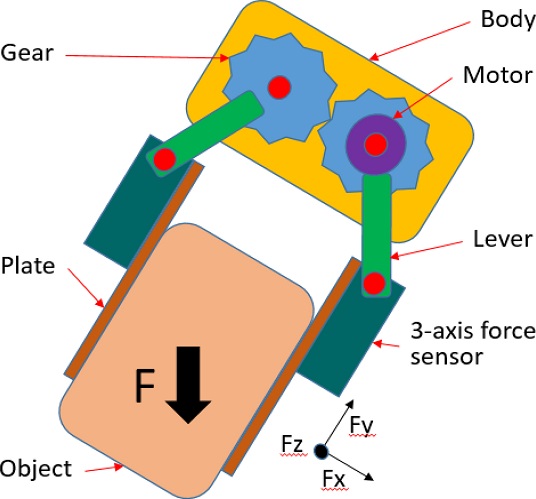
여기서, F는 미지물체의 무게(N), Fx는 3축 힘센서의 Fx 힘센서로부터 측정된 x 방향의 힘(N), Fy는 3축 힘센서의 Fy 힘센서로부터 측정된 y 방향의 힘(N), Fz는 3축 힘센서의 힘센서로부터 Fz 측정된 z 방향의 힘(N)을 각각 나타낸다.
2.2 지능형 그리퍼의 3축 힘센서 구조
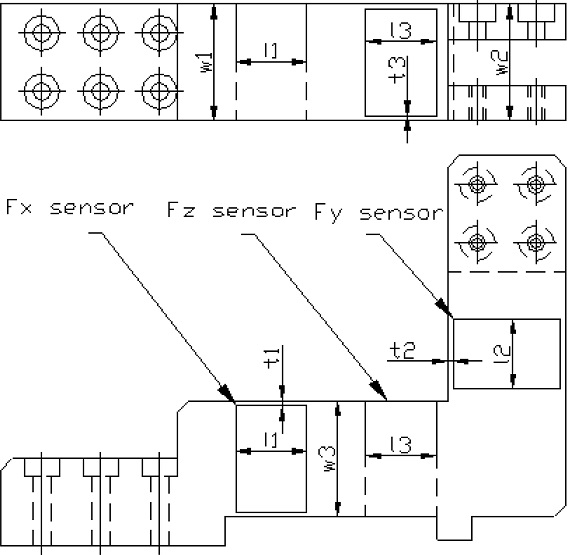
Fig. 2는 3축 힘센서의 구조를 나타내고 있고, 이것은 Fx 힘센서 감지부(Fx Sensing Element), Fy 힘센서 감지부(Fy Sensing Element), Fz 힘센서 감지부(Fz Sensing Element), 고정구 1(Fixture 1), 고정구 2(Fixture 2) 등으로 구성되고, 이것들은 한 몸체로 되어 있다. Fx 힘센서 감지부, Fy 힘센서 감지부, Fz 힘센서 감지부는 2개의 얇은 판으로 구성되어 있고, 각각 x 방향, y 방향, z 방향의 힘을 측정할 수 있도록 위치해 있으며, 힘센서를 제작할 때 스트레인 게이지가 부착되는 평판이다. Fx 힘센서의 감지부의 크기인 길이는 l1이고 폭은 w1이며 두께는 t1, Fy 힘센서의 감지부의 크기인 길이는 l2이고 폭은 w2이며 두께는 t2, Fz 힘센서의 감지부의 크기인 길이는 l3이고 폭은 w3이며 두께는 t3이다. 고정구 1은 그리퍼의 링크와 연결되고, 그리퍼의 링크의 회전에 따라 그리퍼 판이 물체를 잡는 방향으로 수평하게 동작된다. 고정구 2는 그리퍼 판을 고정하는 평판이고, 이 평판은 물체를 잡을 때 접촉한다.
Fig. 2Structure of 3-axis force sensor

2.3 지능형 그리퍼의 3축 힘센서의 설계
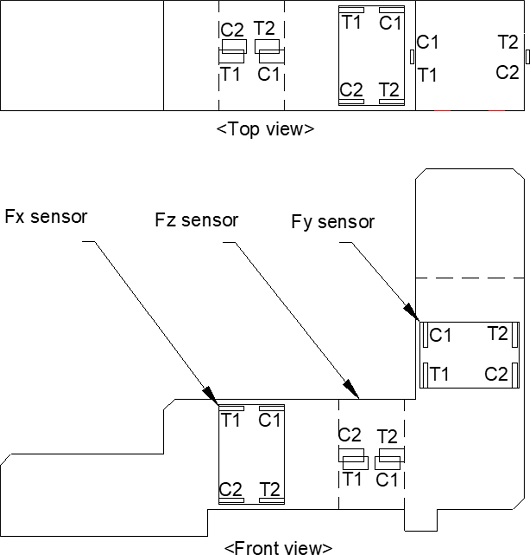
Fig. 3은 3축 힘센서의 스트레인 게이지 부착 위치를 나타내고 있고, Fx 힘센서, Fy 힘센서, Fz 힘센서의 각각 스트레인 게이지 부착 위치는 T1과 T2는 인장 스트레인 게이지, C1과 C2는 압축 스트레인 게이지이고, 인장 스트레인 게이지 부착 위치는 3축 힘센서에 힘을 가하였을 때 스트레인 게이지 부착 위치가 인장되고, 압축 스트레인 게이지 부착 위치는 3축 힘센서에 힘을 가하였을 때 스트레인 게이지 부착 위치가 압축된다. 각 힘센서의 스트레인 게이지들은 손상되지 않도록 내부 감지부에 부착된다.
Fig. 3Strain gage location of 3-axis force sensor
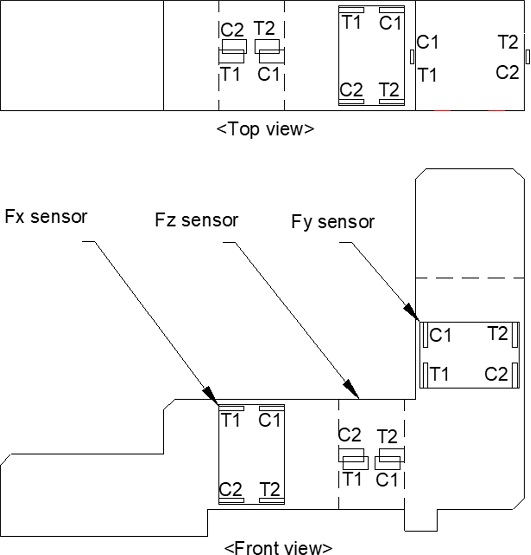
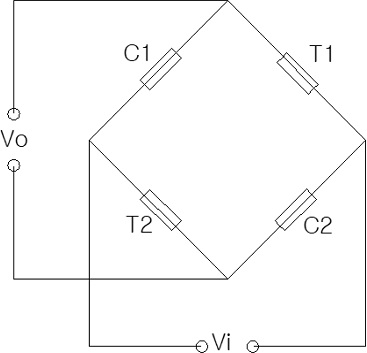
Fig. 4는 휘스톤 브리지를 나타내고 있고, 이것은 3개의 각 센서를 제작할 때 부착된 4개의 스트레인 게이지로 구성된다. 힘센서를 설계할 때에는 정격출력을 결정해야 하고, 정격출력이 결정되면 각 스트레인 게이지 부착 위치에서 정격출력에 적합한 변형률을 구조해석을 통해 구해야 하고, 이것을 이용하여 정격변형률을 계산해야 한다. 휘스톤 브리지의 정격변형률식은 다음
식(2)와 같이 나타낼 수 있다.
Fig. 4Wheatstone bridge circuit

여기서, ε는 정격변형률, εT1는 스트레인 게이지 부착 위치 T1에서의 인장변형률, εC1는 스트레인 게이지 부착 위치 C1에서의 압축변형률, εT2는 스트레인 게이지 부착 위치 T2에서의 인장변형률, εC2는 스트레인 게이지 부착위치 C2에서의 압축변형률이다.
정격변형률을 이용하여 3축 힘센서의 각 힘센서의 정격출력을 계산하는 식은 다음
식(3)과 같이 쓸 수 있다.
여기서, Vo는 휘스톤 브리지 회로의 출력전압, Vi는 휘스톤 브리지 회로의 입력전압, K는 스트레인 게이지의 게이지 상수, ε은 힘센서의 정격변형률이다.
3축 힘센서의 Fx 힘센서, Fy 힘센서, Fz 힘센서의 감지부를 결정하기 위해서는 소프트웨어를 이용하여 구조해석을 실시해야 하고, 이것을 위해서는 설계변수를 결정해야 한다. 설계변수는 3축 힘센서의 Fx 힘센서, Fy 힘센서, Fz 힘센서의 정격출력을 0.5 mV/V, 각 힘센서의 정격용량을 30 N, 각 힘센서의 정격 변형률을 1,000 um/m, 각 힘센서의 길이 l1, l2, l3은 각각 12 mm, 폭 w1, w2, w3는 각각 20 mm로 결정하였고, 스트레인 게이지 부착 위치는 폭의 중앙선과 보의 끝으로부터 2 mm 지점이다. 스프트웨어 입력하는 재료상수인 종단성계수는 힘센서의 재질이 알루미늄 70계열이므로 70 GPa, 프와송의비는 0.3이다. 각 힘센서의 정격출력을 0.5 mV/V로 결정한 것은 감지부의 두께가 얇기 때문에 감지부와 블록이 연결되는 코너 부분에서 파괴되는 것을 방지하기 위함이다. 스트레인 게이지 부착 위치를 감지부의 끝지점으로부터 2 mm 지점으로 결정한 것은 사용된 스트레인 게이지의 크기(3 × 5.2 mm)를 고려했기 때문이다. 3축 힘센서의 구조해석은 각각의 설계변수를 소프트웨어에 입력하고, 정격용량인 30 N을 x 방향, y 방향, z 방향으로 힘을 각각 가하여 실시하였다.
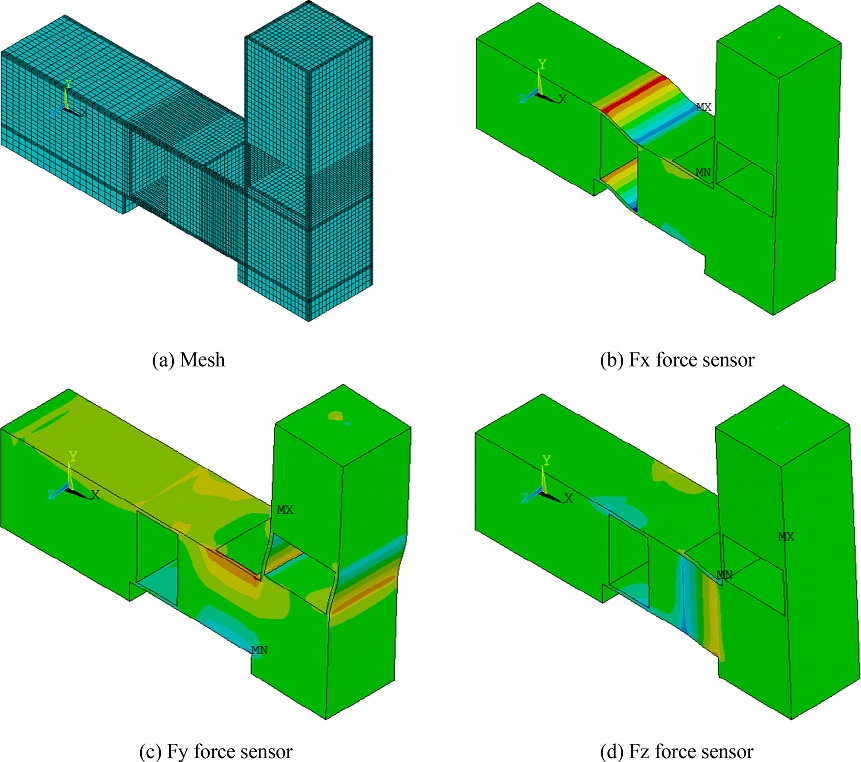
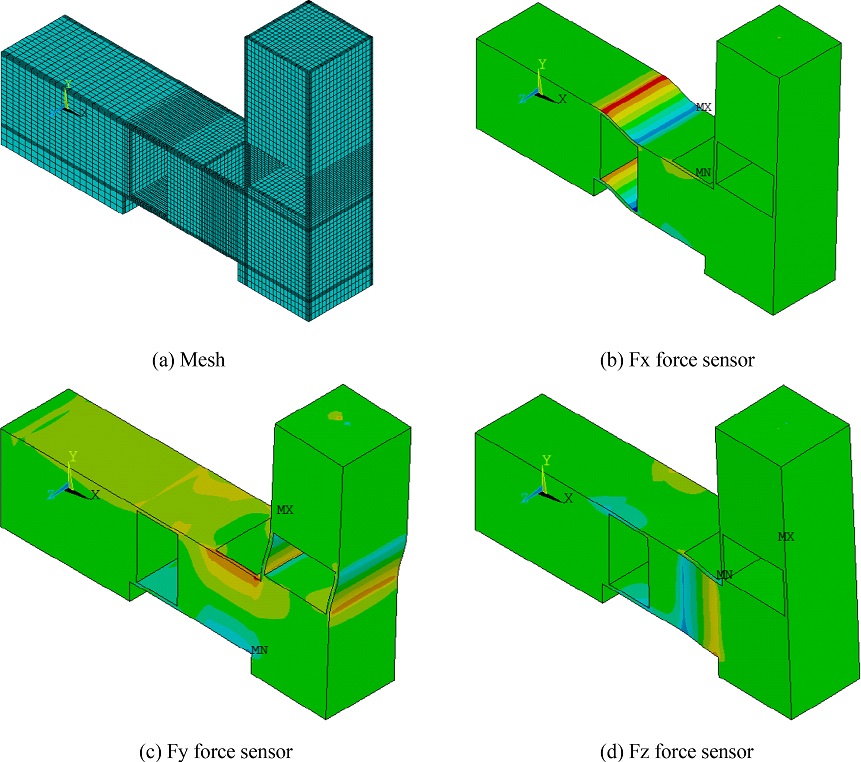
Figs. 5는 3축 힘센서의 구조해석 결과를 나타내고 있고,
5(a)는 3축 힘센서의 격자를 나눈 것을 나타내고 있으며, 이것은 각 힘센서 감지부의 길이 방향 크기를 0.5 mm, 폭방향은 20개로 각각 나누었다.
Fig. 5(b)는 Fx 힘센서의 구조해석 결과이고, 이것은 2개의 중공 감지부가 상하로 변형됨을 보이고 있다.
Fig. 5(c)는 Fy 힘센서의 결과를 나타내고 있고, 이것의 중공 감지부도 좌우 방향으로 변형됨을 보이고 있다. 그리고
Fig. 5(d)는 Fz 힘센서의 결과를 나타내고 있고, 이것의 중공 감지부도 예상했던 것과 같이 변형됨을 나타내고 있다.
Fig. 5Structural analysis of 3-axis force sensor
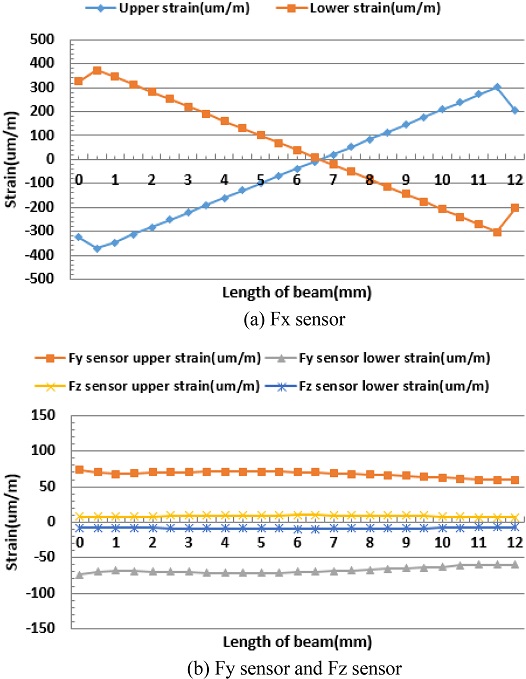
Figs. 6은 Fx 힘센서의 정격용량인 30 N의 힘을 가했을 때 3축 힘센서의 변형률을 나타내고 있고,
6(a)는 Fx 힘센서 감지부의 변형률을 나타내고 있다. 변혈률이 0 um/m인 지점은 보의 길이가 6.7 mm 지점이고 양쪽 보의 끝으로 갈수록 변형률이 증가되며, 보의 길이가 0과 12 mm 지점은 감소하는 경향을 보인다. 이것은 스프트웨어의 끝효과 때문이다.
Fig. 6(b)는 Fy 힘센서와 Fz 힘센서의 변형률을 나타내고 있고, Fy 힘센서의 상부와 하부 변형률은 ±60 um/m 정도를 나타내고 있으며, Fz 힘센서의 상부와 하부 변형률은 ±10 um/m 정도를 나타내고 있다.
Fig. 6Strain of 3-axis force sensor when 30 N of rated capacity of Fx force sensor is applied

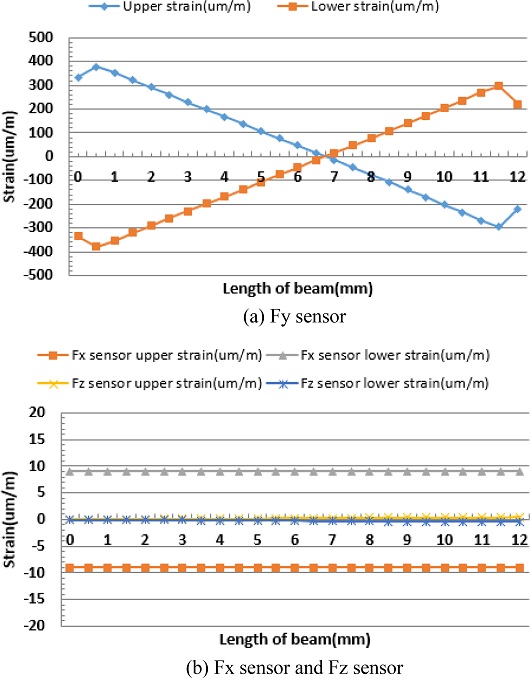
Figs. 7은 Fy 힘센서의 정격용량인 30 N의 힘을 가했을 때 3축 힘센서의 변형률을 나타내고 있고,
7(a)는 Fy 힘센서 감지부의 변형률을 나타내고 있다. 변혈률이 0 um/m인 지점은 보의 길이가 6.9 mm 지점이고 양쪽 보의 끝으로 갈수록 변형률이 증가되며, 보의 길이가 0과 12 mm 지점은 감소하는 경향을 보인다.
Fig. 7(b)는 Fx 힘센서와 Fz 힘센서의 변형률을 나타내고 있고, Fx 힘센서의 상부와 하부 변형률은 ±9 um/m 정도를 나타내고 있으며, Fz 힘센서의 상부와 하부 변형률은 ±0 um/m 정도를 나타내고 있다.
Fig. 7Strain of 3-axis force sensor when 30 N of rated capacity of Fy force sensor is applied

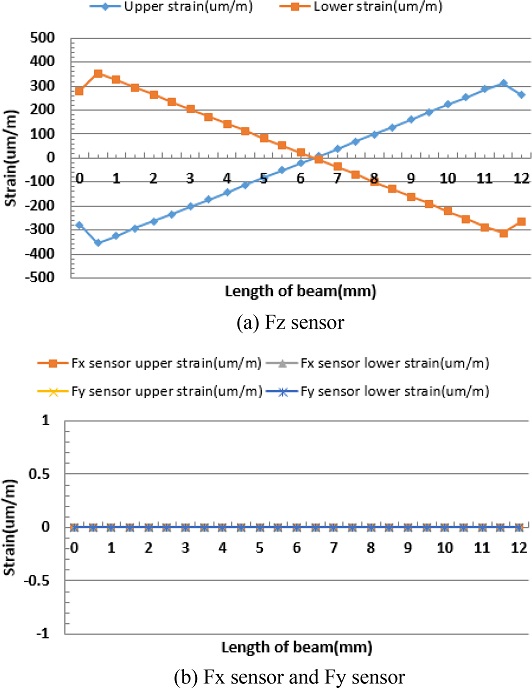
Figs. 8은 Fz 힘센서의 정격용량인 30 N의 힘을 가했을 때 3축 힘센서의 변형률을 나타내고 있고,
8(a)는 Fz 힘센서 감지부의 변형률을 나타내고 있다. 변혈률이 0 um/m인 지점은 보의 길이가 6.6 mm 지점이고 양쪽 보의 끝으로 갈수록 변형률이 증가되며, 보의 길이가 0과 12 mm 지점은 감소하는 경향을 보인다.
Fig. 8(b)는 Fx 힘센서와 Fy 힘센서의 변형률을 나타내고 있고, Fx 힘센서의 상부와 하부 변형률은 ±0 um/m 정도를 나타내고 있고, Fz 힘센서의 상부와 하부 변형률은 ±0 um/m 정도를 나타내고 있다.
Fig. 8Strain of 3-axis force sensor when 30 N of rated capacity of Fz force sensor is applied

Table 1은 3축 힘센서(Fx 힘센서, Fy 힘센서, Fz 힘센서)의 스트레인 게이지 부착 위치에서의 인장과 압축변형률을 각각 나타내고 있고, 각 힘센서의 정격변형률은
식(2)에 의해 계산되었고, 오차는 기준 정격변형률 1,000 um/m를 기준으로 계산되었다. 가장 큰 정격변형률 오차는 Fz 힘센서가 -2.6%이었고, 이것은 감지부의 가공오차를 0.01 mm를 고려하여 감지부의 두께를 결정하였기 때문이다. 구조해석을 통해 결정된 각 힘센서의 두께 t1, t2, t3은 각각 0.90 mm이었다. 그러므로 3축 힘센서의 각 센서의 감지부의 크기는 길이 l1, l2, l3는 각각 12 mm, 폭 w1, w2, w3은 각각 20 mm, 두께 t1, t2, t3은 0.9 mm로 결정되었다.
Table 1Rated strain at strain gage attachment location of 3-axis force sensor
Table 1
|
Sensor |
ε
T1
|
ε
C1
|
ε
T2
|
ε
C1
|
ε
|
Error [%] |
|
Fx |
283 |
-283 |
208 |
-208 |
982 |
-1.8 |
|
Fy |
291 |
-291 |
203 |
-203 |
988 |
-1.2 |
|
Fz |
264 |
-264 |
223 |
-223 |
974 |
-2.6 |
Table 2는 3축 힘센서의 각 센서의 정격출력을 나타내고 있고, 이것은 사용된 스트레인 게이지(N2A-13-S1452-350)의 게이지 상수 2.03과
Table 1의 정격변형률을
식(3)에 대입하여 계산되었다. 3축 힘센서 중 가장 큰 정격출력은 Fx 힘센서가 -0.32%이었다.
Table 2Rated output of each sensor of 3-axis force sensor
Table 2
|
Sensor |
Fx |
Fy |
Fz |
|
Rated output [mV/V] |
0.4984 |
0.5014 |
0.4943 |
|
Error [%] |
-0.32 |
0.28 |
-1.14 |
3. 지능형 그리퍼의 3축 힘센서 제작 및 특성 실험
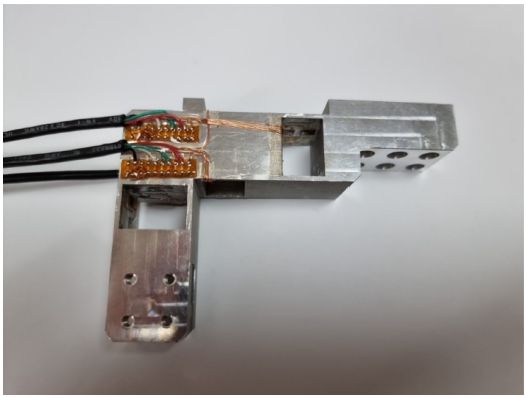
3.1 3축 힘센서 제작
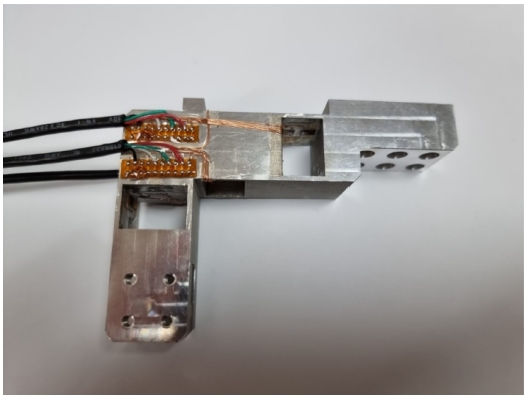
Figs. 9는 제작된 3축 힘센서를 나타내고 있고, 이것은 3에 나타낸 각 힘센서의 스크레인 게이지 부착 위치에 스트레인 게이지(N2A-13-S1452-350)를 부착하고, 4에 나타낸 휘스톤 브리지를 구성하여 제작되었다. 각 힘센서를 구성하는 스트레인 게이지는 사각홀 내부에 부착되어 외부의 충격 등에 보호가 되도록 제작되었다. 제작된 3축 힘센서가 사용되기 위해서는 정격출력 특성 실험이 실시되어야 한다.
Fig. 9Manufactured 30axis force sensor
제작된 3축 힘센서를 사용할 수 있는지를 확인하기 위해 정격출력, 비직선성 오차, 재현도 오차 등을 계산하는 특성 평가를 실시해야 한다.
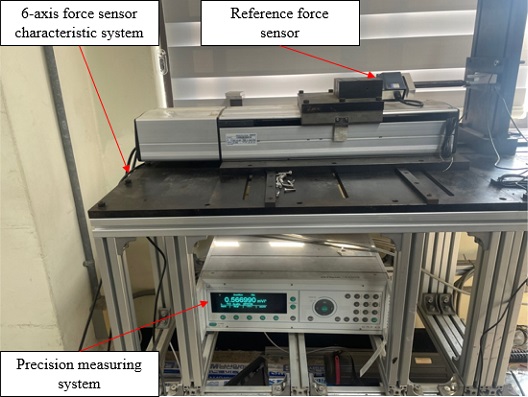
Fig. 10은 3축 힘센서의 특성 실험 장치를 나타내고 있고, 이것은 6축 힘센서 특성 실험 장치(6-Axis Force Sensor Characteristic System)
[17]이고, 3축 힘센서의 출력을 측정하는 장치는 정밀 측정 장치(Precision Measuring System, DMP40)이고, 기준 힘센서(Reference Force Sensor)의 값을 기준으로 측정된다. 특성 실험은 3축 힘센서를 특성 실험 장치에 고정한 후 각 힘센서의 정격용량인 30 N을 x, y, z 방향에서 각각 증가순과 감소순으로 3회씩 가하여 정격출력값을 측정하였다. 증가순 힘단계는 0, 6, 12, 18, 24, 30 N이고, 감소순의 힘단계는 증가순과 역순이다. 이와 같이 측정한 값들을 이용하여 정격출력과 비직선성 오차, 재현도 오차를 계산하였다.
Table 3은 3축 힘센서의 각 센서의 정격출력, 비직선성 오차, 재현도 오차를 각각 나타내고 있다. 최대 정격출력 오차는 0.81% 이내였고, 최대 비직선성 오차 0.06% 이내였으며, 최대 재현도 오차는 0.05% 이내이었다. 이것들은 다축 힘센서의 오차들과 유사하다. 그러므로 제작한 3축 힘센서는 지능형 그리퍼에서 미지물체를 안전하게 잡기 위해 힘 Fx, Fy, Fz를 측정하는데 사용될 수 있다고 판단된다. 미지물체의 무게를 측정할 때에는 측정한 3개의 힘을
식(1)에 대입하여 계산한다. 지능형 그리퍼로 미지물체를 누르는 힘은
식(1)에 의해 계산된 물체의 무게에 따라 결정된다. 이것은 추후에 지능형 그리퍼가 제작되면 특성 실험에 의해 결정될 것이다.
Fig. 10Characteristic test of 3-axis force sensor
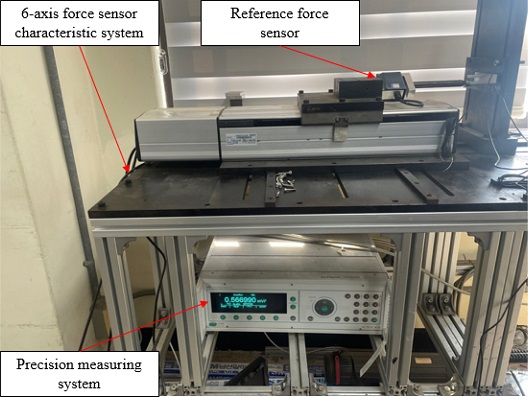
Table 3Rated output error, nonlinearity error and reproducibility error of each sensor of 3-axis force sensor
Table 3
|
Sensor |
R. O. (FEM) [mV/V] |
R. O. (Test) [mV/V] |
R.O. error [%] |
Nonlinearity error [%] |
Reproducibility error [%] |
|
Fx |
0.4984 |
0.5024 |
0.81 |
0.05 |
0.04 |
|
Fy |
0.5014 |
0.4982 |
-0.64 |
0.06 |
0.05 |
|
Fz |
0.4943 |
0.4980 |
0.75 |
0.05 |
0.05 |
4. 결론
본 논문에서는 다양한 종류의 미지물체를 안전하게 잡기 위한 3축 힘센서(Fx 힘센서, Fy 힘센서, Fz 힘센서)를 설계 및 제작하였다. 3축 힘센서는 본 논문 이후에 설계 및 제작되는 지능형 그리퍼에 고정하기 적합하도록 구조를 설계하였고, 소프트웨어를 이용하여 구조해석을 실시하였다. 3축 힘센서의 각 센서의 최대 정격변형률 오차는 -2.6% 이내이었고, 최대 정격출력 오차는 0.32% 이내이었다. 그리고 각 힘센서의 감지부 크기는 길이 l1, l2, l3는 각각 12 mm, 폭 w1, w2, w3은 각각 20 mm, 두께 t1, t2, t3는 0.9 mm로 결정되었다. 제작된 3축 힘센서를 특성 실험한 결과 최대 정격출력 오차는 0.81% 이내, 비직선성 오차가 0.06% 이내, 재현도 오차가 0.05% 이내이었으므로 지능형 그리퍼에 부착하여 사용될 수 있을 것으로 판단된다.
추후 연구로는 제작한 3축 힘센서를 지능형 그리퍼에 부착하여 다양한 종류의 미지물체를 안전하게 잡는 특성 실험을 실시하는 것이다.
ACKNOWLEDGMENTS
본 과제(결과물)는 2021년도 교육부의 재원으로 한국연구재단의 지원을 받아 수행된 지자체-대학 협력기반 지역혁신 사업의 결과입니다(No. NRF-2021RIS-003).
REFERENCES
- 1.
Kyberd, P. J., Evans, M., & Te Winkel, S., (1998). An intelligent anthropomorphic hand, with automatic grasp. Robotica, 16(5), 531-536.
10.1017/S0263574798000691
- 2.
Kyberd, P. J., Light, C., Chappell, P. H., Nightingale, J. M., Whatley, D., et al., (2001). The design of anthropomorphic prosthetic hands: A study of the southampton hand. Robotica, 19(6), 593-600.
10.1017/S0263574701003538
- 3.
Tai, K., El-Sayed, A.-R., Shahriari, M., Biglarbegian, M., & Mahmud, S., (2016). State of the art robotic grippers and applications. Robotics, 5(2), 11.
10.3390/robotics5020011
- 4.
Birglen, L., & Schlicht, T., (2018). A statistical review of industrial robotic grippers. Robotics and Computer-Integrated Manufacturing, 49, 88-97.
10.1016/j.rcim.2017.05.007
- 5.
Roberge, J.-P., Ruotolo, W., Duchaine, V., & Cutkosky, M., (2018). Improving industrial grippers with adhesion-controlled friction. IEEE Robotics and Automation Letters, 3(2), 1041-1048.
10.1109/LRA.2018.2794618
- 6.
Honarpardaz, M., Tarkian, M., Ölvander, J., & Feng, X., (2017). Finger design automation for industrial robot grippers: A review. Robotics and Autonomous Systems, 87, 104-119.
10.1016/j.robot.2016.10.003
- 7.
Birglen, L. (2015). Enhancing versatility and safety of industrial grippers with adaptive robotic fingers. In the IEEE/RSJ International Conference on Intelligent Robots and Systems, 2911-2916.
10.1109/IROS.2015.7353778
- 8.
Fantoni, G., Capiferri, S., & Tilli, J., (2014). Method for supporting the selection of robot grippers. Procedia CIRP, 21, 330-335.
10.1016/j.procir.2014.03.152
- 9.
Jorg, O., & Fantoni, G., (2021). Fast development cycle for the design of industrial grippers. Procedia CIRP, 100, 211-216.
10.1016/j.procir.2021.05.057
- 10.
Chelpanov, I., & Kolpashnikov, S., (1983). Problems with the mechanics of industrial robot grippers. Mechanism and Machine Theory, 18(4), 295-299.
10.1016/0094-114X(83)90122-2
- 11.
Huang, S.-J., Chang, W.-H., & Su, J.-Y., (2017). Intelligent robotic gripper with adaptive grasping force. International Journal of Control, Automation and Systems, 15(5), 2272-2282.
10.1007/s12555-016-0249-6
- 12.
Bicchi, A. (2000). Hands for dexterous manipulation and robust grasping: A difficult road toward simplicity. IEEE Transactions on Robotics and Automation, 16(6), 652-662.
10.1109/70.897777
- 13.
Song, A., Wu, J., Qin, G., & Huang, W., (2007). A novel self-decoupled four degree-of-freedom wrist force/torque sensor. Measurement, 40(9-10), 883-891.
10.1016/j.measurement.2006.11.018
- 14.
- 15.
Joung, J. H., & Kim, G. S., (2017). Design of a force sensor for thigh force measurement of a wearable walking robot. Journal of the Korean Society Precision Engineering, 34(10), 705-711.
10.7736/KSPE.2017.34.10.707
- 16.
Kim, H.-S., & Kim, G.-S., (2017). Development of calf link force sensors of walking assist robot for leg patients. Journal of Sensor Science and Technology, 26(2), 114-121.
10.5369/JSST.2017.26.2.114
- 17.
Kim, G.-S., & Yoon, J.-W., (2007). Development of calibration system for multi-axis force/moment sensor and its uncertainty evaluation. Journal of the Korean Society for Precision Engineering, 24(10), 91-98.
Biography
- Han-Sol Kim
M.Sc. candidate in the Department of Control & Instrumentation Engineering, Gyeongsang National University. His research interest is industrial robot and intelligent robot.
- Gab-Soon Kim
Professor in the Department of Control & Instrumentation Engineering, Gyeongsnag National University. His research interest is walking aid robot and intelligent robot.