ABSTRACT
People with hemiplegia require ongoing rehabilitation exercises to regain function in their upper limbs. However, due to the increasing number of elderly and disabled people, the number of rehabilitation professionals is insufficient. As a solution to this problem, researchers have been exploring various upper limb rehabilitation exercise robots. Unfortunately, these robots are often large and heavy, making them cumbersome to wear and use. The proposed exoskeleton rehabilitation robot consists of two robotic modules: an elbow module (1 DOF) and a wrist module (1 DOF). In order to analyze the robot's workspace, the kinematics were calculated using the D-H parameters. To generate the trajectories, five able-bodied individuals wore the robot and performed the hand-wash motion, resulting in a total of 10 trajectory data sets. The reference trajectories were then generated by polynomial regression based on the collected data. Lastly, a passive mode control was experimented with in the rehabilitation process, and the results demonstrated the promising effectiveness of the proposed robot.
-
KEYWORDS: Upper limb rehabilitation, Rehabilitation robot, Wearable robot, Trajectory generation, Kinematic analysis
-
KEYWORDS: 상지 재활, 재활 로봇, 착용형 로봇, 경로 생성, 기구학 분석
1. 서론
편마비 환자의 신체 일부 근력 약화 및 비정상적 근육 경직은 지속적인 재활 훈련을 통해 회복이 가능하며, 재활 환자가 자가 훈련을 수행할 경우 치료 효과가 높다[
1]. 그러나 자가 재활 훈련이 가능한 경증 환자는 극소수에 불과하며, 재활 전문가 부족은 전문가와 재활환자 모두에게 신체적인 부담을 준다. 이에 따라 다양한 재활 운동 로봇이 대안으로 연구되고 있다.
상지 재활 운동 로봇은 말단장치형과 착용형으로 분류된다[
2]. 말단장치형은 착용형에 비해 환자가 장비를 착용하기 용이하나, 상대적으로 부피가 크고 각 관절의 독립적인 재활 훈련을 제공하기 어렵다. Gallina는 편마비 환자 재활 운동을 위해 5자유도 와이어 구동 말단장치형 로봇을 제시하였다[
3]. MIT-MANUS는 재활 로봇 연구 초기의 상지 말단장치형 로봇으로, 운동 목표지점을 환자가 따라가도록 운동을 보조한다[
4].
착용형 재활 로봇은 사용자 관절과 로봇 관절이 동기화되어 힘의 증폭 및 움직임 교정, 일상생활 활용 등의 장점이 있으나, 로봇 경량화, 구동 힘 전달, 측정 및 동작 제어 등의 기술적 구현 난이도가 높다[
5]. Hocoma-Armeo는 스프링 등의 수동 소자와 전기 모터를 통해 재활 훈련을 보조하는 5자유도 재활 운동로봇이다[
6]. Lee는 6자유도 상지 재활 로봇을 제시하고 수동훈련을 위한 ROM(운동 범위)을 분석하였다[
7].
대부분의 기존 상지 재활 로봇은 부피가 크고 거치대에 연결되는 형태로 일상생활에서 착용이 불가능하다. 본 연구에서는 기존 로봇들과 비교하여 부피와 무게가 작아 사용자 부담을 줄이고, 일상생활에서 착용이 가능한 2자유도 상지 재활 운동 로봇을 제시한다. 또한, 대표적인 일상생활 동작인 손 씻기 동작 모사실험을 통해 팔꿈치와 손목 각도 데이터를 수집하고, 재활 운동로봇의 수동 모드 제어 성능을 살펴보았다.
2. 상지 재활 운동 로봇
Fig. 1 Rehabilitation exercise with the proposed robot

Fig. 2 The proposed upper-limb rehabilitation robot

Table 1 Specification of the proposed rehabilitation robot
Table 1
|
Elbow module |
Wrist module |
|
Size |
31.5 × 16 × 20 cm |
27 × 11 × 12.5 cm |
|
Weight |
1,270 g |
955 g |
|
DOF |
1 DOF
(flexion/extension) |
1 DOF
(pronation/supination) |
|
ROM |
0 ~120° |
-80 ~ 80° |
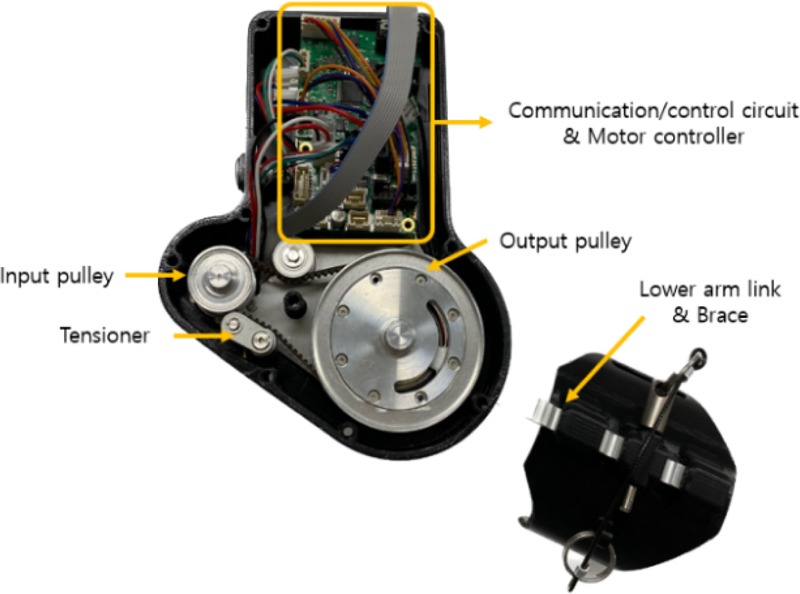
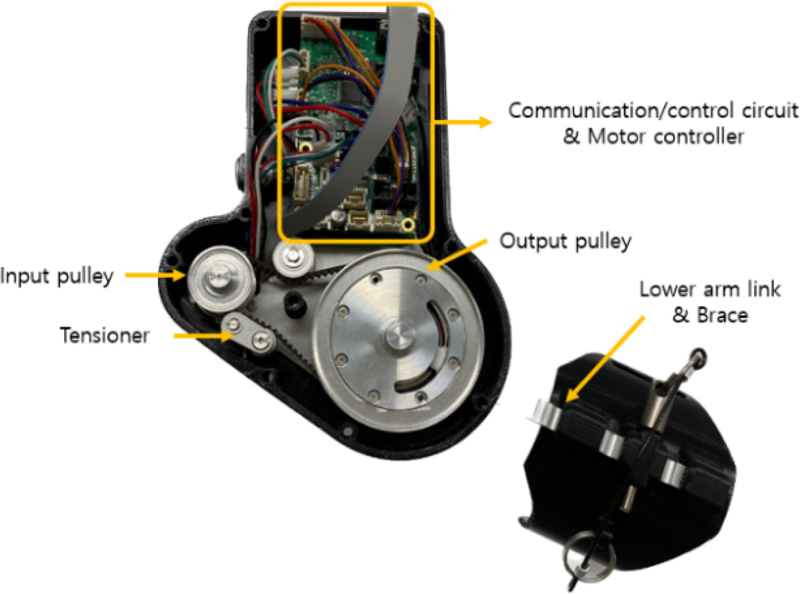
팔꿈치 모듈은 1자유도 Flexion/Extension 운동이 가능한 회전 관절로, 구동부, 제어부, IMU 모듈, 상지 장착부로 구성된다. 팔꿈치 모듈은
Fig. 3에서 보이듯 타이밍 풀리 내부 토크 센서와 엔코더로 구성되며, 손목 모듈과 결합하거나 독립적으로 사용할 수 있다. 다양한 사용자의 상지에 대응하기 위해 하박 링크는 72에서 135 mm까지 길이 조정이 가능하다. 메인 프레임과 동력 전달부 등은 알루미늄 합금으로 제작되었으며, 상지 장착부와 외형 케이스는 PLA 소재로 제작하였다.
Fig. 3 Elbow rehabilitation robot
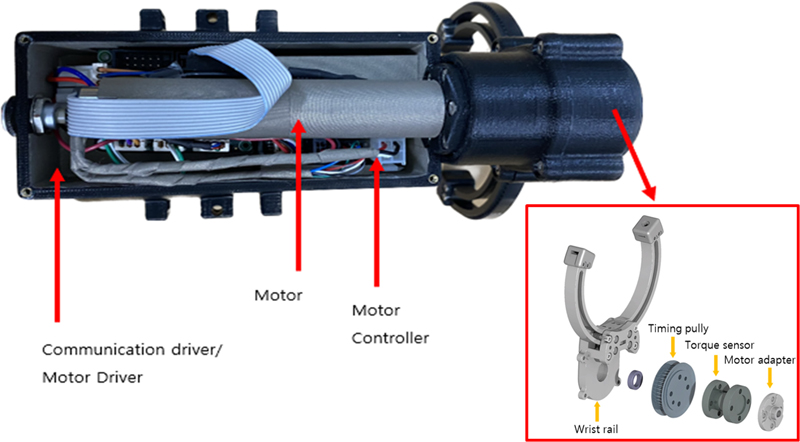
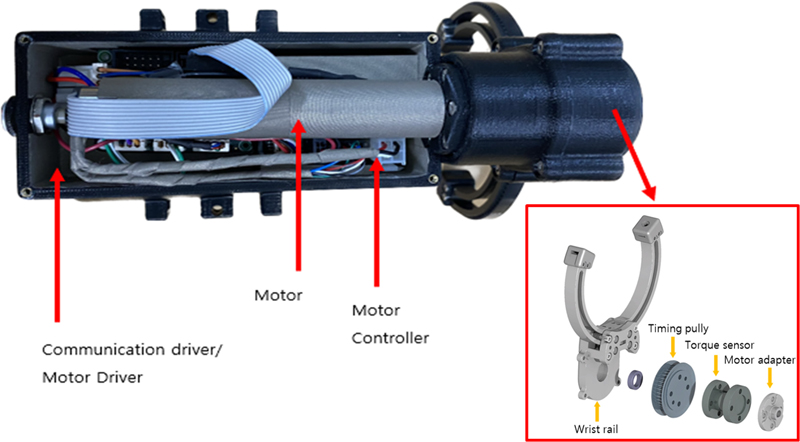
손목 재활 모듈은 1자유도 Pronation/Supination운동을 구현하며, 구동부, 제어부, 하박 장착부로 구성된다.
Fig. 4은 타이밍 풀리와 연결된 토크센서와 모터 엔코더등의 구성을 보여준다. 손목 레일, 손목 레일 지지부, 동력 전달부 등은 알루미늄 합금으로, 하박 장착부와 외형 케이스는 3D 프린팅으로 제작하였다.
Fig. 4 Wrist rehabilitation robot
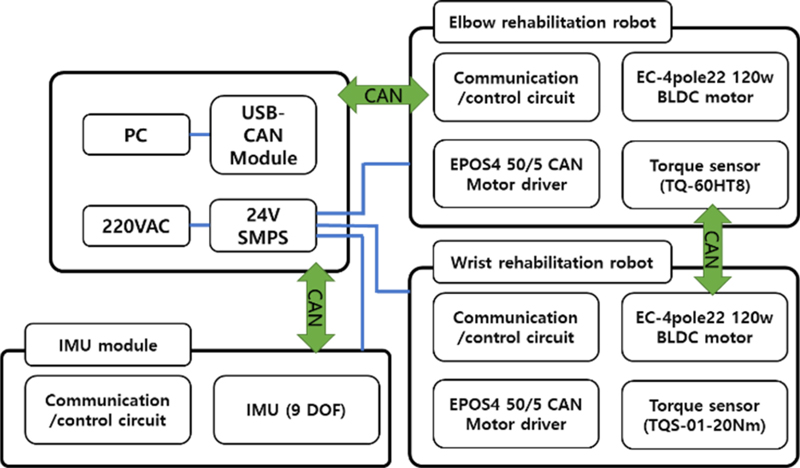
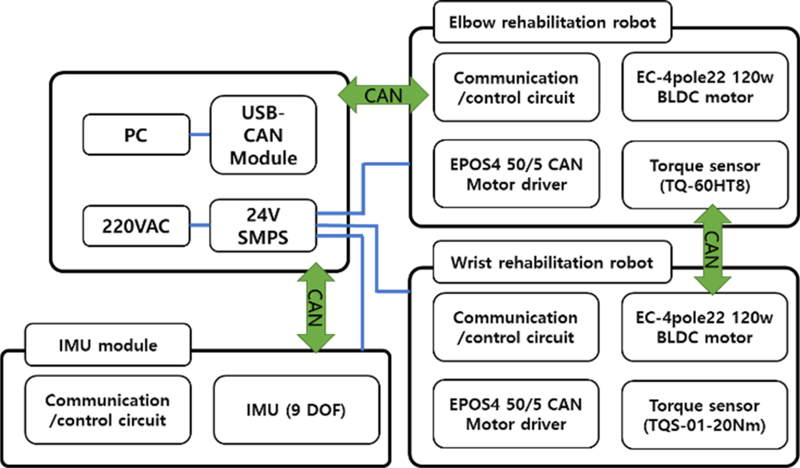
손목과 팔꿈치 재활 로봇은 Maxon EC-4pole 120 w BLDC 모터와 EPOS4 드라이버로 구성된다. 팔꿈치 로봇은 CAS TQ-60HT8, 손목 로봇은 TQS-01-20 Nm토크 센서를 사용하였다. 각 재활 운동 로봇의 작동 명령, 엔코더 값, 토크 값 등의 데이터는 USB-CAN모듈을 통해 PC와 통신하며, 스위치 모드 전원공급장치(24 V)를 통해 전원 공급받는다.
Fig. 5 Rehabilitation robot system
3. 상지 재활 운동 로봇 분석
3.1 기구학
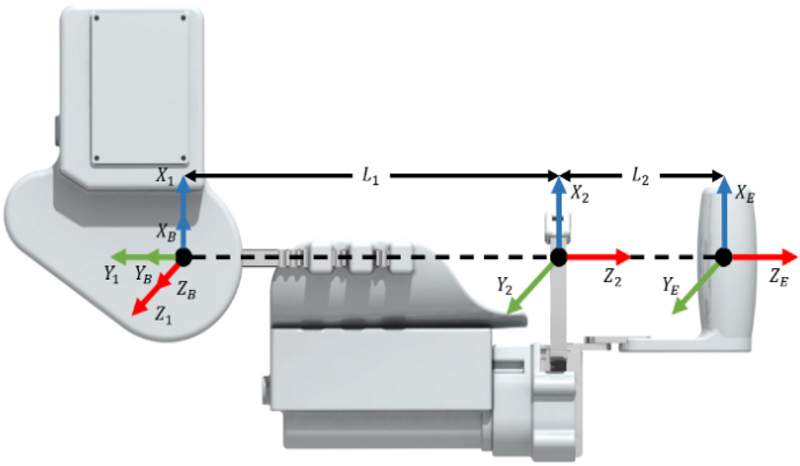
로봇 기구학은 로봇의 각 조인트 회전 각도와 말단장치(End-effector, EE) 위치 및 각도 관계를 나타낸다.
Fig. 6은 본 연구에서 활용된 재활 로봇의 각 링크와 말단장치 좌표계 사이의 관계를 보인다.
Table 2는 링크 길이(Length), X축 기준 두 링크 사이의 비틀림 각(Twist), 두 링크의 Z축 사이 거리 (Offset), Z축기준 두 링크 사이의 각도(Theta)를 나타낸다[
2].
Fig. 6Kinematic model of robot
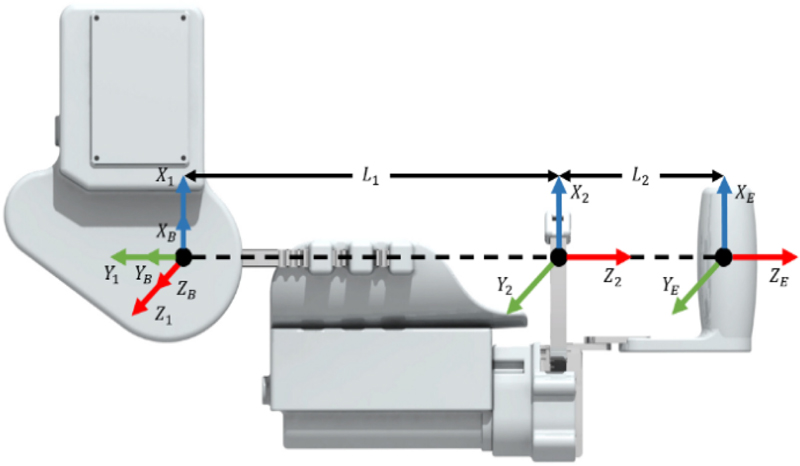
Table 2D-H parameter of rehabilitation robot
Table 2
|
i |
α
|
α
|
θ
|
d
|
|
1 |
0 |
0 |
θ
1
|
0 |
|
2 |
π/2 |
0 |
θ
2
|
L
1
|
|
End effector |
0 |
0 |
0 |
L
2
|
제안한 로봇의 말단 장치(손잡이) 위치 및 자코비안은 아래
식(1) 및
(2)로 표현된다[
8].
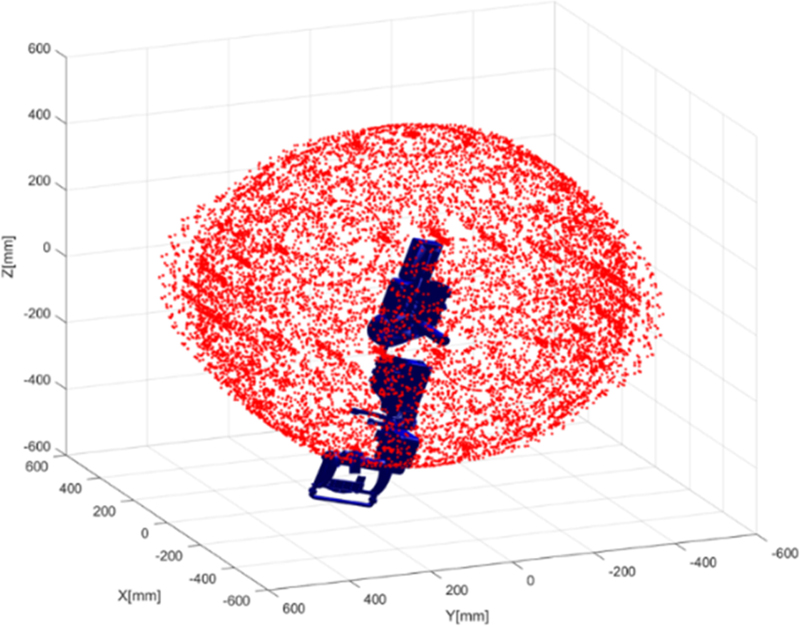
로봇의 작업영역(Reachable Workspace)은 로봇 끝에 위치한 말단장치가 도달 가능한 삼차원적 공간 영역을 나타낸다. 본 논문에서는 사용자가 재활 로봇을 착용 후 일상생활 동작(손 씻기)을 모사할 때 로봇의 최대 가동 범위를 분석하였다.
Fig. 7에서 본 로봇의 작업 영역(반경 410 mm)은 손 씻기 동작에서 필요한 작업 영역보다 넓은 것으로 분석되었다.
Fig. 7Reachable workspace of robot
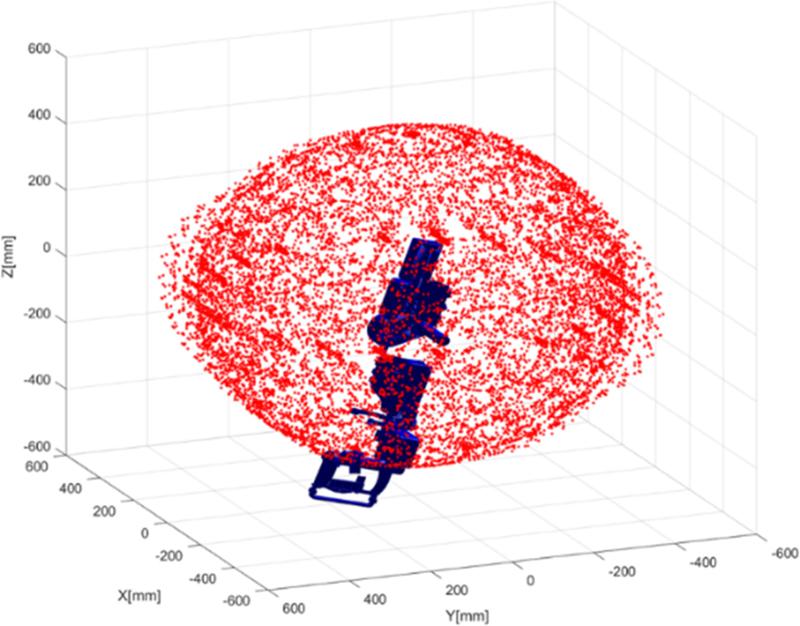
Fig. 8Hand-washing motion

4. 수동 모드 운동 실험
본 연구의 수동 모드 재활 운동은 사용자가 외력에 저항하면서 사전 지정된 궤적을 추종하여 근육 위축 감소하는 것을 목적으로 한다. 따라서 본 연구의 수동 모드 실험은 일반 성인 5명을 대상으로 일상생활 동작(Activities of Daily Living, ADL) 레퍼런스 궤적을 생성한 후, 뻣뻣한 상태의 경증 환자로 가정한 사용자가 재활운동 로봇의 일상 동작 수동 재활 모드 운동을 하도록 하였다.
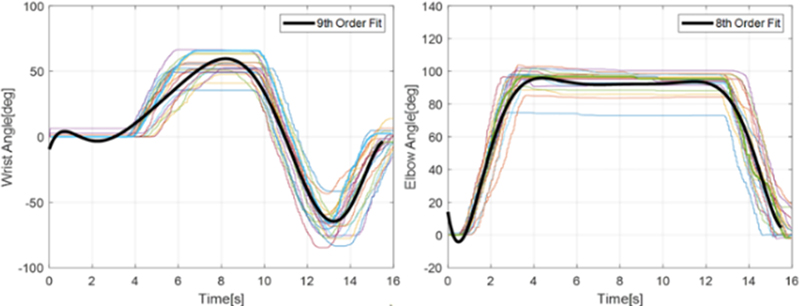
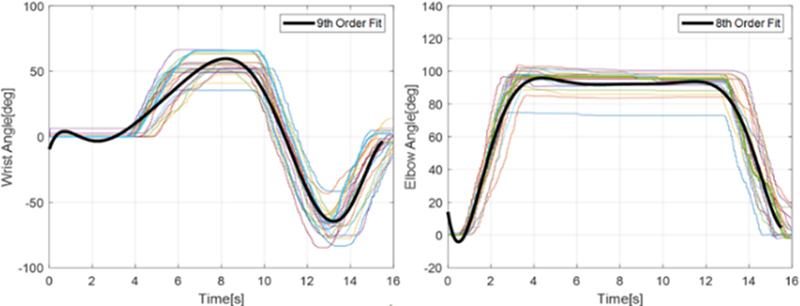
운동 참조 궤적은 일반 성인 5명을 대상으로 일상생활 동작 중, 팔꿈치와 손목을 복합적으로 사용하는 ‘손 씻기’ 동작(16초)을 모사하여 10회 반복하여 정의하였다. 각 관절의 각도 궤적은 다항회귀(Polynomial Regression)를 적용하여 구체화하였다.
Fig. 9는 손 씻기 동작의 반복 실험을 통해 추출된 참조 궤적과 다항회귀를 통해 생성된 수정 참조 궤적을 나타낸다. 팔꿈치 및 손목 재활 로봇의 레퍼런스 궤적은 각각
식(3)과
식(4)를 따른다. 팔꿈치 및 손목 재활 운동 로봇의 궤적은 8차 (
R2=0.1802) 및 9차 (
R2=0.2017) 식으로 구하였다.
Fig. 9 Wash hand trajectory and polynomial regression
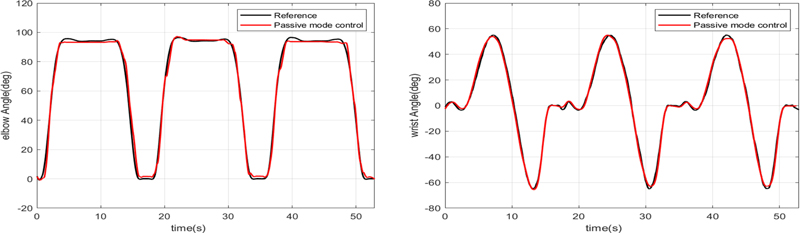
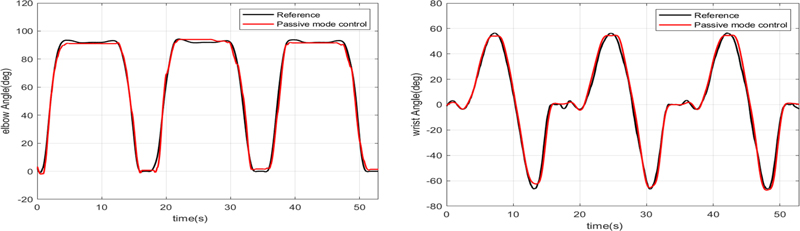
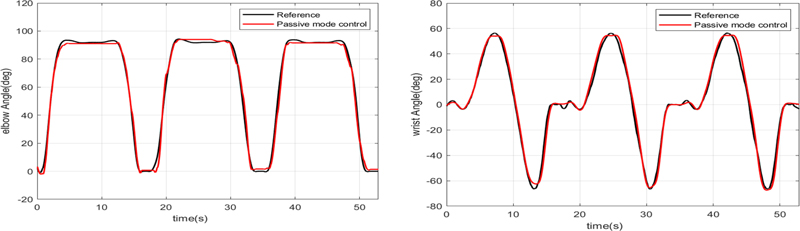
수동 모드 실험은 성인 남성 2명을 대상으로 앞서 생성된 참조 궤적을 추종하였다.
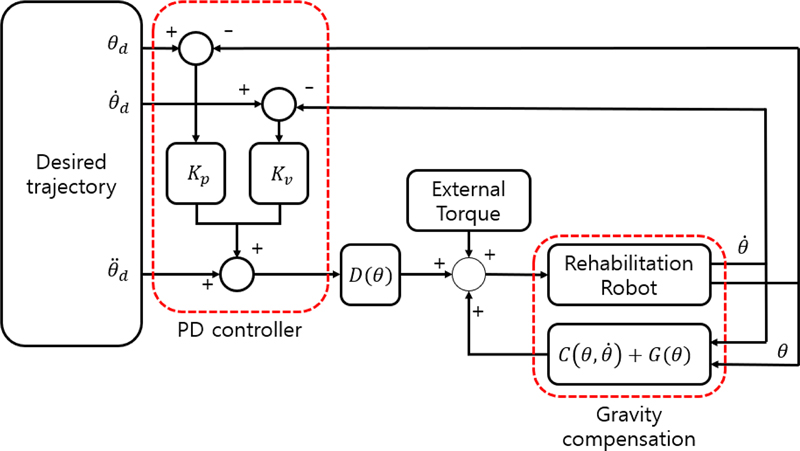
Fig. 10과 같이 본 논문에서는 재활 운동로봇의 수동 모드 실험에 목표 각도(
θd)와 실제 각도(
θ) 사이의 오차를 최소화하기 위해 PD기반 계산 수동 모드 운동 제어기를 사용하였다. 실험 결과는 각각
Figs. 11과
12에 나타나 있으며, 제어기 성능을 평가하기 위해 로봇의 참조 궤적 추종도를 파악하였다. 궤적 추종도는 참조 궤적과 실제 이동 궤적의 평균제곱근 오차(Root Means Square Error, RMSE)로 평가되었다. 피험자A의 팔꿈치 및 손목의 수동운동 RMSE는 2.92 및 8.63°이다. 피험자 B의 팔꿈치 수동 모드 운동 RMSE는 2.94°이며, 손목 수동운동 RMSE는 3.37°이다. 전체 실험 참가자의 수동 모드 제어 실험은 유사한 크기의 상지 로봇 추종 오차와 비교하여 상대적으로 작은 추종 오차를 보였다.
Fig. 10 PD-computed passive mode rehabilitation controller
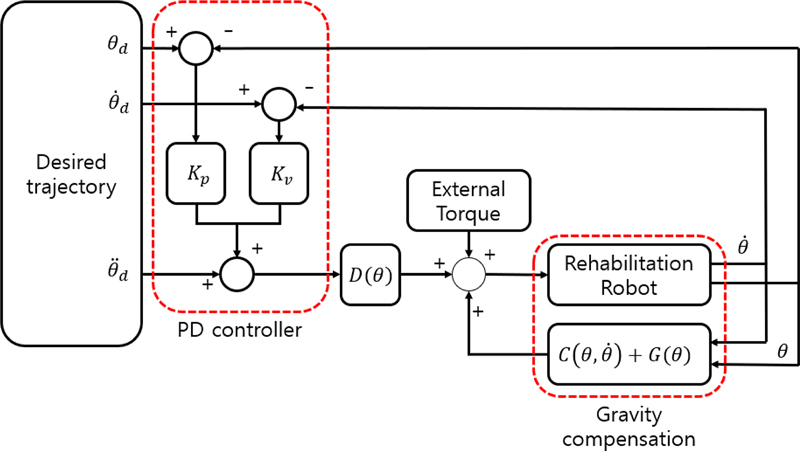
Fig. 11 Passive rehabilitation exercise (Human A)
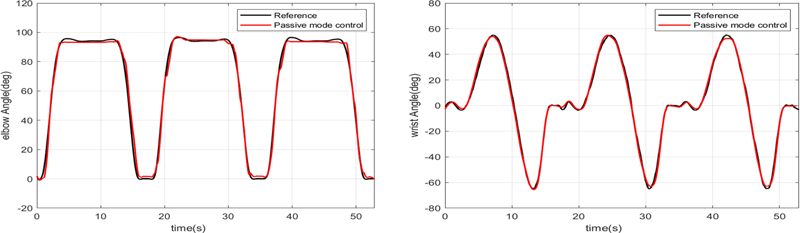
Fig. 12 Passive rehabilitation exercise (Human B)
5. 결론
본 연구에서는 부피와 무게를 감소시켜 편마비 환자의 사용부담을 줄인 상지 재활 운동 로봇을 제시하고, 상지 재활 운동로봇의 기구학 및 작업 영역 분석을 수행하였다. 일상생활 동작(손 씻기)의 참조 궤적을 생성하고, 수동 재활 모드 실험을 통해 제안한 제어기 성능을 평가하였다. 본 결과는 제안된 상지 재활운동 로봇 및 수동 모드 운동이 재활 로봇 운동 분야에서 적용 가능성이 높음을 보여준다.
ACKNOWLEDGMENTS
본 연구는 보건복지부 국립재활원 재활연구용역사업(R&D) 재활로봇 중개연구용역(NRCTR-EX22005)으로 수행되었습니다.
REFERENCES
- 1.
Mercier, L., Audet, T., Hébert, R., Rochette, A., Dubois, M., (2001), Impact of motor, cognitive, and perceptual disorders on ability to perform activities of daily living after stroke, Strock, 32(11), 2602-2608.
10.1161/hs1101.098154
- 2.
Suh, U., (2023), Development of wearable upper limb rehabilitation robot and gravity compensation control, M.Sc. Thesis, Kyungpook National University.
- 3.
Rosati, G., Gallina, P., Masiero, S., Rossi, A., (2005), Design of a new 5 DOF wire-based robot for rehabilitation, Proceedings of the 9th International Conference on Rehabilitation Robotics 2005, 430-433.
- 4.
Chang, M. C., Chun, M. H., (2015), Use of robots in rehabilitative treatment, Journal of Korean Medical Association, 58(2), 141-146.
10.5124/jkma.2015.58.2.141
- 5.
Shen, Y., Ferguson, P. W., Rosen, J., (2019), Upper limb exoskeleton systems-overview, in: Wearable robotics: systems and applications, Rosen, J., Ferguson, P. W., (Eds.,), Academic Press.
10.1016/B978-0-12-814659-0.00001-1
- 6.
- 7.
Lee, J. S., Kim, T. H., Kim, K. G., (2022), Development of a rehabilitation robot for shoulder pain treatment, Journal of Rehabilitation Welfare Engineering & Assistive Technology, 16(4), 237-244.
10.21288/resko.2022.16.4.236
- 8.
Park, H., Shin, M., Choi, G., Sim, Y., Lee, J., Yun, H., Jun, M. B.-G., Kim, G., Jeong, Y., Yi, H., (2024), Integration of an exoskeleton robotic system into a digital twin for industrial manufacturing applications, Robotics and Computer-integrated Manufacturing, 89, 102746.
10.1016/j.rcim.2024.102746
Biography
- UHyun Suh
is researcher in the Samick Precision Ind. Co. Ltd.. His research interest is wearable robot design and Safety Evaluation Guideline for Medical robot/devices.
- SeongSig Choi
is master student in the Department of Mechanical Engineering, Kyungpook National University. His research interest are intelligent control and electronic system design in robotic system.
- HoonMin Park
is Ph.D. candidate in the Department of Mechanical Engineering, Kyungpook National University. His research interest are autonomous robot design, intelligent/optimal control, application of XR device into real robotic system.
- TaeSeok Kim
is master student in the Department of Mechanical Engineering, Kyungpook National University. His research interest are EMC design of medical robots and Optimal control of cooperative robot.
- KeonYoung Oh
is an Assistant professor at the school of Mechanical Engineering at Kyungpook National University. His research interests are brain- robot interface, robotics for rehabilitation and biomechanics.
- Hak Yi
is an Associate professor at the school of Mechanical Engineering at Kyungpook National University. His research interests are design and control of exoskeleton and humanoid robots.
Citations
Citations to this article as recorded by

- Path Optimization for 6-axis Robot Control Using Open Simulation-based Reinforcement Learning
Cho A Kim, Jong U Baek, Su Han Lee, Ju Yeon Lee
Journal of the Korean Society for Precision Engineering.2026; 43(5): 421. CrossRef