ABSTRACT
Drones are increasingly used in various fields such as agriculture, logistics, and disaster response due to their agility and versatility. In indoor plant factories, small drones are used to monitor crop conditions and collect environmental data. However, small drones require frequent recharging due to their limited battery capacity, making autonomous charging systems essential for uninterrupted operation of drones. This study proposes an autonomous charging station designed for small drones in indoor plant factories. The system employs a wired charging mechanism to enhance charging efficiency, and a 3-degree-of-freedom (DOF) pose alignment system, utilizing an XY plotter and turntable, to correct drone landing errors. The alignment system ensures that drones, landing with random positions and orientations, are automatically adjusted to the correct position for charging. Experiments demonstrated that the charging station successfully aligned and charged drones with a 93% success rate on the first attempt. Even in cases of failure, the system automatically retried until a 100% success rate was achieved. This autonomous drone charging system has the potential to significantly enhance operational efficiency in indoor plant factories and can be adapted for various drone models in future applications.
-
KEYWORDS: Drone autonomous charging, Wired charging, Indoor plant factory, Small drone, 3-DOF alignment mechanism
-
KEYWORDS: 드론 자동 충전, 유선 충전, 실내 식물 공장, 소형 드론, 3 자유도 정렬 메커니즘
1. 서론
최근 드론은 다양한 분야의 작업에 활용되고 있다. 드론을 군사 작전이나 재난 현장에 투입하여 인간이 접근하기 어려운 지역에서 정찰 및 생존자 탐색을 수행하기도 하며, 서비스 산업에 활용하여 물품을 배달하기도 한다. 또한 드론은 농업 자동화를 위해 실내외 농업 현장에 투입되어 작물 상태 감시, 환경 데이터 획득, 농약 살포 등의 작업을 수행한다
[1,
2].
특히 실내 식물공장에서는 작물 상태 감시와 환경 데이터 획득을 위해 경량 드론을 운용한다. 경량 드론은 대부분 저용량 리튬 폴리머 배터리를 사용하며 비행 가능 시간이 30분 내외로 짧다
[3,
4]. 드론의 비행 가능 시간을 늘리기 위해 드론에 고용량 배터리를 탑재하면 배터리의 무게가 늘어나기 때문에 페이로드가 작은 경량 드론에 고용량 배터리 탑재는 적합하지 않다. 실내 식물공장에서 경량 드론을 사용하기 위해서는 잦은 배터리 교체나 충전이 필요하며 드론의 배터리 교체나 충전을 자동화하기 위해 다양한 충전 스테이션이 개발되었다.
드론의 배터리 교체를 자동화하는 시스템은 기계 요소가 복잡하고 구축하는데 많은 비용이 필요하다
[5-
7]. 드론의 배터리 충전을 자동화하는 시스템은 충전 방식에 따라 드론을 무선으로 충전하는 시스템과 드론을 유선으로 충전하는 시스템으로 분류할 수 있다.
드론을 무선으로 충전하는 시스템은 코일에서 발생하는 유도기전력을 이용해 드론을 충전한다. 드론이 충전을 위해 착륙 가능한 영역이 넓어 드론이 착륙 위치를 정확하게 제어하지 않아도 된다는 장점이 있다. 하지만 무선 충전을 위해서는 드론에 유도기전력을 받을 수 있는 장치를 추가로 설치해야 하며, 유선 충전에 비해 무선 충전 속도나 효율이 떨어진다는 단점도 있다
[8-
10].
드론을 유선으로 충전하는 시스템은 드론에 충전 단자를 연결해야 하므로 드론이 충전 단자를 연결할 수 있는 위치에 정확하게 착륙해야 한다. 드론이 목표 위치로 정확하게 착륙하기 위해서는 높은 측위 성능과 정확한 모터 제어가 요구되지만 경량 드론은 페이로드의 제약으로 탑재할 수 있는 센서와 제어기에 한계가 있어 착륙 위치를 정확하게 제어하기 어렵다. 임의의 위치에 드론이 착륙하면 드론을 충전 위치로 이동시켜 충전을 시작하는 자동화 시스템이 개발되었으나 착륙한 드론의 자세는 정렬하지 않는다
[11,
12].
본 연구에서는 실내 식물공장에서 활용하는 경량 드론의 운용환경에 적합한 드론 자동 충전 스테이션을 개발하였다. 실내 식물공장에서 사용하는 경량 드론은 1회 충전 시 운용 가능한 시간이 짧으므로 잦은 충전이 필요하고 드론의 연속적인 작업을 위해서는 충전에 소요되는 시간이 짧아야 한다. 개발한 드론 자동 충전 스테이션은 드론이 착륙 오차 범위 내 임의의 위치와 자세로 착륙하면 드론을 충전이 가능한 위치와 자세로 정렬한다. 정렬된 드론의 충전 단자에 충전선을 연결하는 유선 충전 방식으로 배터리 고속 충전이 가능하도록 하였다.
2. 드론 자동 충전 스테이션
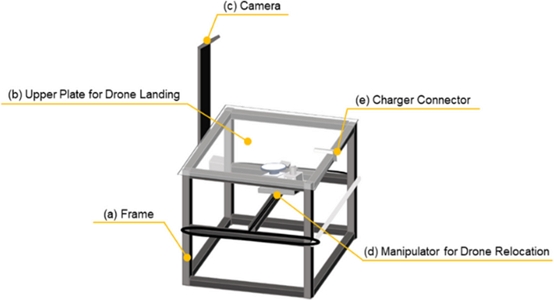
개발한 드론 자동 충전 스테이션은 하드웨어 설치를 위한 프레임, 드론이 착륙하기 위한 상판, 착륙한 드론의 위치와 자세를 영상 기반으로 파악하기 위한 카메라, 드론 정렬을 위한 머니퓰레이터, 유선 충전을 위한 충전 단자 연결부로 구성되며
Fig. 1과 같이 배치하였다.
Fig. 1 Conceptual design of autonomous drone charging system
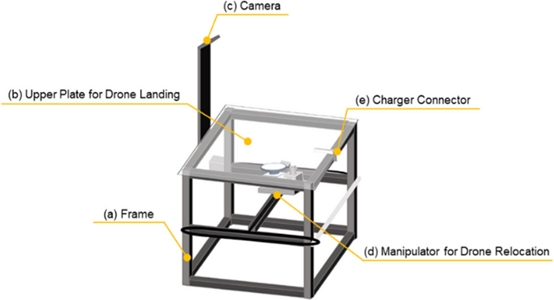
Fig. 1(a)는 드론 자동 충전 스테이션의 각 구성 요소를 거치하기 위한 프레임으로 2020 알루미늄 프로파일을 이용해 제작하였다.
Fig. 1(b)는 드론이 착륙하기 위한 상판으로 3 mm 두께의 아크릴 판재로 제작하였다.
Fig. 1(c)에는 Pixy 2.1 카메라(Charmed Labs, USA)를 설치하여 상판에 착륙한 드론의 이미지를 획득하고 영상처리를 통해 착륙한 드론의 위치와 자세를 반복해서 측정하였다.
Fig. 1(d)는 드론 정렬 머니퓰레이터로 End-Effector가 평면에서 3 자유도(2병진, 1회전) 운동을 할 수 있도록 개발하였다. 드론 정렬 머니퓰레이터는 카메라로 측정한 드론의 위치와 자세에 기반하여 드론을 목표 위치와 자세로 옮기는 역할을 수행하였다. 드론 정렬 머니퓰레이터의 모든 구성요소는 드론이 상판에 착륙하는 것을 방해하지 않기 위해 모두 상판 아래에 배치하였다. 상판 아래에 위치한 드론 정렬 머니퓰레이터의 End-Effector가 상판 위에 착륙한 드론을 목표 위치와 자세로 옮기기 위해 전자석을 End-Effector에 배치하였다. 필요에 따라 전자석을 끄고 드론 정렬 머니퓰레이터만 이동하거나 전자석을 켜고 End-Effector에 드론을 부착하여 함께 이동할 수 있도록 설계하였다.
Fig. 1(e)는 유선 충전이 가능한 목표 위치와 자세로 정렬된 드론의 충전 단자에 충전기를 연결하기 위한 충전 단자 연결부다.
드론 자동 충전 스테이션을
Fig. 1과 같이 설계하면서
Table 1의 설계 요구사항을 고려하였다. 충전하고자 하는 소형 드론이 착륙 목표 지점으로부터 반경 150 mm 이내에 임의의 위치에 착륙하는 것을 확인하였고
Fig. 1(b)에 표시한 드론이 착륙하는 상판의 크기는 가로 세로 최소 300 mm가 필요한 것으로 계산하였다. 실제 설계에서는 드론의 크기를 고려하여 드론이 착륙하기 위한 상판의 크기를 가로 세로 400 mm의 정사각형 형태로 결정하였다.
Fig. 1(d)의 드론 정렬 머니퓰레이터는 End-Effector가 드론 자동 충전스테이션의 상판 전체 영역을 병진운동 하고 360
o 회전하는 작업영역(Workspace)을 갖도록 설계하였다. 머니퓰레이터의 End-Effector는 착륙한 드론을 전자석의 자기력으로 부착하여 목표 위치와 자세로 이동시키기 위해 소형 드론 무게 이상의 페이로드를 가져야 한다. 대표적인 상용 소형 드론(DJI Tello, DJI, China)의 무게가 87 g이므로 약 15%의 안전계수를 적용해 머니퓰레이터의 최소 페이로드가 100 g이 되도록 전자석 등의 부품을 선정하였다.
Fig. 1(c)의 Pixy 2 카메라는 드론이 상판 어디에 착륙하더라도 드론을 촬영할 수 있도록 카메라의 Horizontal Field Of View (HFOV)와 Vertically Field Of View (VFOV)가 스테이션의 상판 전체를 포함하도록 하였다. 이를 위해 카메라는 상판에서 320 mm 높이에 30
o 기울여 설치하였다.
Table 1 Design requirements for autonomous drone charging system
Table 1
|
Subject |
Requirements |
Landing area
(Upper Plate Area) |
Width: Min. 300 mm
Height: Min. 300 mm |
|
Manipulator DOF |
3 DOF
(2 translation., 1 rotation) |
|
Manipulator workspace |
Whole landing area 360o
|
|
Payload |
Min. 100 g |
|
Camera FOV |
Whole landing area |
|
Charging method |
Wired charging |
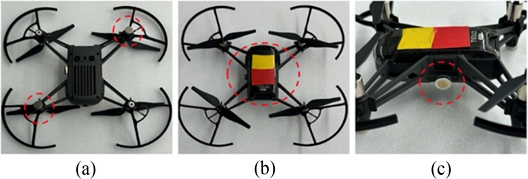
개발한 드론 자동 충전 스테이션을 이용해 드론을 충전하기 위해서 드론에는
Fig. 2에 표시한 세 가지 요소를 추가로 부착하였다. 추가로 부착한 세 가지 요소의 총 무게는 2.4 g이었다.
Fig. 2 Additional components attached to drones for autonomous drone charging system
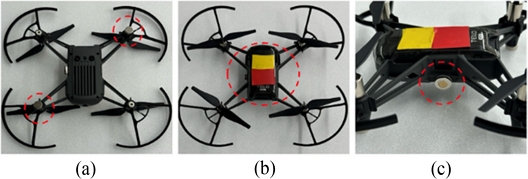
정렬 머니퓰레이터 전자석의 자기력에 의해 드론이 연결되어 함께 이동하도록
Fig. 2(a)와 같이 자성이 있는 재료를 드론 하단에 부착하였다. 자성이 있는 재료를 드론에 추가로 부착하면서 드론의 하단에 위치한 카메라나 센서 등에 영향을 최소화하도록 배치를 고려하였다. 개발한 드론 자동 충전 스테이션에서 카메라를 이용해 착륙한 드론의 위치와 자세를 추적하고 구동 알고리즘에 활용하기 위해
Fig. 2(b)와 같이 노란색과 빨간색으로 구성된 인식표를 드론 상단에 부착하였다. 드론의 충전 단자에는
Fig. 2(c)와 같이 자성이 있는 충전 어댑터를 부착하여 드론이 정렬 메커니즘에 의해 충전 단자 연결부의 충전 영역으로 정렬되면 자성이 있는 충전선이 자기력에 의해 드론의 충전 단자와 연결되도록 하였다.
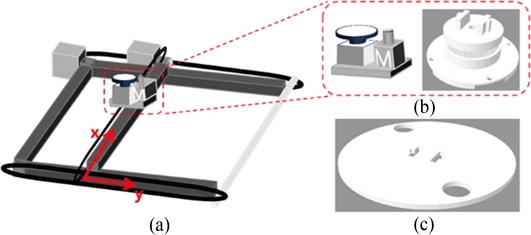
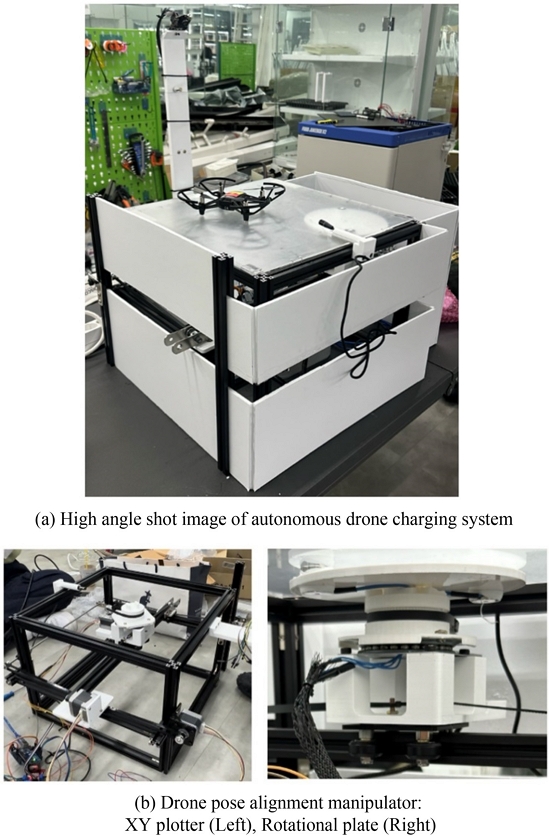
임의의 위치에 착륙한 드론을 충전이 가능한 위치로 정렬하기 위해 드론 정렬 머니퓰레이터는 평면에서 3 자유도 운동(2자 유도 병진 운동, 1 자유도 회전 운동)이 가능하도록 개발하였다.
Fig. 3은 드론 정렬 머니퓰레이터의 구성을 나타낸다.
Figs. 3(a)의 XY 플로터가 2 자유도 병진 운동을 구현하고, 3(b)의 회전판이 1 자유도 회전 운동을 구현한다.
Fig. 3Detailed structure of drone pose alignment manipulator
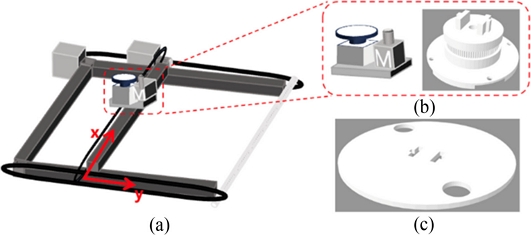
Fig. 3(a)로 표시한 XY 플로터는 2개의 모터, 모터에 연결된 풀리, 아이들러, 타이밍 벨트로 구동되는 2차원 직교로봇 형태로 설계하였다.
Table 1의 설계 요구사항을 만족하기 위해 XY 플로터는 상판과 평행한 평면에서 움직이며 Workspace는 x축과 y축 방향으로 최대 350 mm 움직이도록 하였다.
Fig. 3(b)의 원형 회전판은 XY 플로터에 부착되어 XY 플로터와 함께 병진 운동하며 착륙한 드론의 자세 정렬을 위해 1 자유도 회전 운동을 구현한다. 원형 회전판은 1개의 모터, 모터에 연결된 풀리와 회전판에 연결된 풀리, 타이밍벨트로 구성되었다. 회전판에 연결된 풀리의 직경과 모터에 연결된 풀리의 직경은 4 : 1의 비율로 선정하여 회전판이 드론을 회전시킬 수 있는 충분한 돌림힘을 낼 수 있도록 하였다.
Figs. 3(b)의 회전판 위에는 전자석을 고정하기 위한 판을 3(c)와 같은 형태로 제작하여 올렸다. 전자석을 고정하는 판이 회전판과 분리, 결합되므로 충전하고자 하는 드론의 형태와 크기에 맞춰 전자석 고정 판을 교체함으로써 드론 자동 충전 스테이션을 다양한 드론의 충전에 사용할 수 있도록 하였다. 드론 정렬 머니퓰레이터의 End-Effector에 12 V, 660 mA, 250 N 전자석을 사용하여 전자석을 켜면 자기력으로 드론을 부착하여 함께 이동시킬 수 있다.
개발한 드론 자동 충전 스테이션의 상판에는 드론이 착륙해야 하기 때문에 드론 정렬 머니퓰레이터의 모든 구성 요소를 드론 자동 충전 스테이션의 상판 아래에 배치하여 드론의 착륙에 방해되지 않도록 하였다.
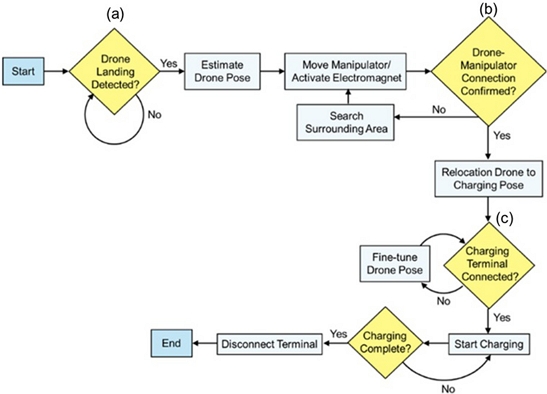
2.2 드론 자동 충전 스테이션 구동 알고리즘
드론 자동 충전 스테이션의 구동은 크게 드론 착륙 감지, 드론 정렬, 충전 단계로 구성된다. 각 단계는 순차적으로 진행되며, 실패 시 재시도 루프를 통해 신뢰성을 확보하였다.
Fig. 4는 전체 구동 알고리즘의 순서도를 나타낸다.
Fig. 4Algorithm flow chart of autonomous drone charging system
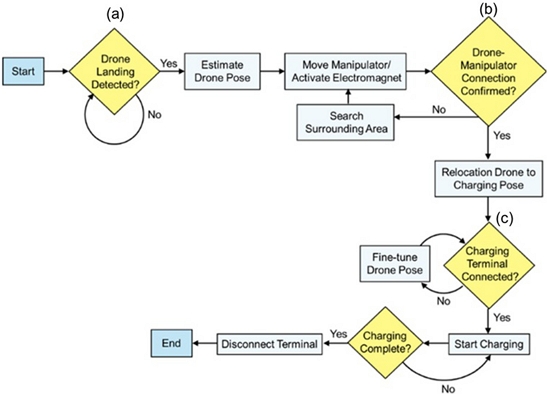
Fig. 4(a)는 드론 착륙 감지 단계이다. 드론 착륙 감지 단계에서는 상판 상단에 설치된 카메라를 통해 드론의 착륙 여부를 지속적으로 모니터링하였다. 카메라는 드론 상단에 부착된
Fig. 2(b)의 인식표를 감지하며, 인식표가 감지되면 드론이 착륙한 것으로 판단하고 다음 단계로 진행하였다. 인식표가 감지되지 않으면 대기 상태를 유지하며 계속해서 드론의 착륙 여부를 모니터링하였다.
드론 정렬 단계는 두 가지 세부 과정으로 구성된다. 먼저, Pixy 2.1 카메라로 촬영한 드론의 인식표 이미지를 Pixy 2의 API를 이용해 처리하고 인식표의 중심 위치와 회전 각도를 추정하였다. 추정한 위치는 최대 1 cm의 오차를 보였고, 추정한 회전 각도는 최대 0.5
o의 오차를 보였다. 추정한 드론의 위치와 자세로 드론 정렬 머니퓰레이터를 이동시키고 전자석을 작동하여 드론과 머니퓰레이터를 자기력으로 연결하였다. 다음으로
Fig. 4(b)에서 드론과 머니퓰레이터의 연결이 성공적으로 이루어졌는지 확인하기 위해 머니퓰레이터를 소폭 이동시키며 카메라로 드론의 위치와 자세를 추적하였다. 만약 드론이 머니퓰레이터와 함께 움직이지 않으면 자기력을 이용한 연결이 실패한 것으로 판단하고, 머니퓰레이터가 드론 주변을 탐색하며 재연결을 시도하도록 하였다. 드론과 머니퓰레이터의 연결이 확인되면 머니퓰레이터를 통해 드론을 충전 가능한 목표 위치와 자세로 정렬하였다.
충전 단계에서는 목표 위치와 자세로 정렬된 드론의 충전 단자와 충전 단자 연결부의 충전선을 자기력으로 연결하였다. 충전선이 연결되고 충전이 시작되면 드론은 자체적으로 배터리 충전 상태 메시지를 스테이션으로 전송하도록 하였다. 드론 자동 충전 스테이션은
Fig. 4(c)와 같이 배터리 충전 상태 메시지를 모니터링하여 충전 진행 상태를 확인하였다. 충전이 시작되지 않을 경우 드론이 연결된 머니퓰레이터를 좌우 방향(
Fig. 6의 x축 방향) 2 cm 범위로 움직이면서 충전이 시작될 때까지 충전선과 충전 단자의 연결을 재시도 하였다. 좌우 2 cm 범위를 탐색했으나 충전이 시작되지 않으면 드론이 연결된 머니퓰레이터를 상하 방향(
Fig. 6의 y축 방향)으로 0.5 cm 움직이고 다시 좌우 2 cm 범위를 탐색하였다. 드론이 연결된 머니퓰레이터가 상하 방향으로도 최대 2 cm 까지만 움직이도록 설정하였다. 드론의 정렬 위치를 미세 조정하여 충전이 시작될 수 있도록 하는 피드백 루프는 미세조정 범위를 상하좌우 2 cm까지 설정하였으나 설정 방법에 따라 미세조정 범위를 늘릴 수 있다. 충전이 시작될 때까지 드론의 정렬 위치를 미세 조정하는 피드백 루프를 통해 신뢰도 높은 시스템을 구성하고자 하였다.
드론 자동 충전 스테이션의 구동 알고리즘에서 각 단계에 발생할 수 있는 실패 상황에 대응하기 위해
Figs. 4(a)부터
4(c)와 같은 재시도 메커니즘을 구현하였다. 재시도 메커니즘을 통해 충전 과정이 단일 시도에서는 실패하더라도 재시도를 통해 성공하도록 하였으며, 최종적으로 충전 성공의 안정성과 신뢰성을 확보하도록 개발하였다.
드론 자동 충전 스테이션의 프로토타입은 드론 정렬 머니퓰레이터에 사용한 XY 플로터에는 두 개의 42각 스테핑 모터(토크 236)를 사용하고 회전판에는 42각 스테핑 모터(토크 140)를 사용해
Fig. 5와 같이 제작하였다.
Fig. 5Prototype of autonomous drone charging system
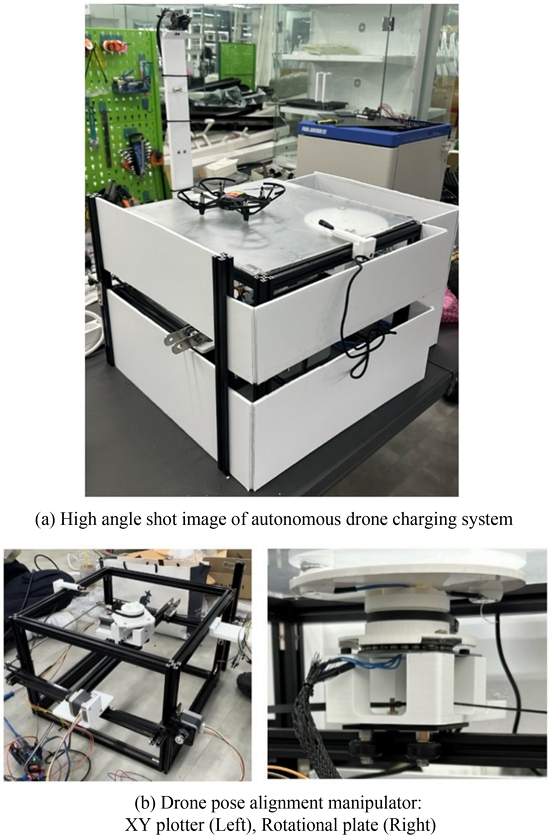
카메라는 Pixy v2.1를 사용하였고 Pixy 2 오픈 소스 라이브러리를 이용해 드론에 부착한 인식표를 인식하고 위치와 자세를 추적하였다.
드론 정렬 머니퓰레이터의 End-Effector는 상판의 중심을 기준으로 상하좌우 모두 175 mm까지 이동할 수 있었다. 드론의 착륙 오차가 최대 반경 150 mm라고 했을 때 드론 정렬 머니퓰레이터의 Workspace가 드론이 착륙하는 임의의 위치와 자세를 모두 포함하도록 제작하였다.
3. 실험 및 결과
3.1 드론 자동 충전 스테이션 성능 검증 방법
3.1.1 드론 정렬 머니퓰레이터의 위치 제어 성능 검증 실험 방법
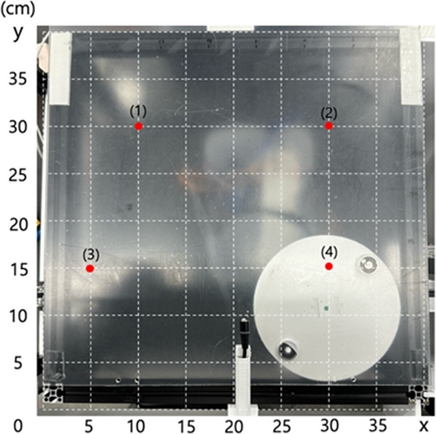
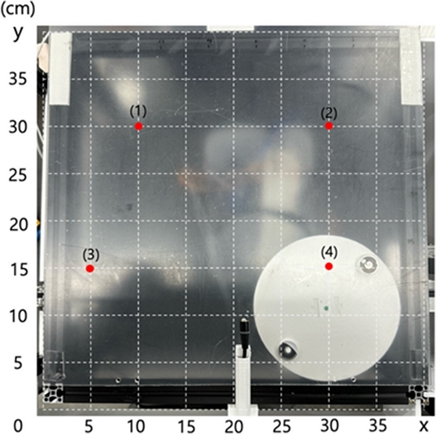
드론 정렬 머니퓰레이터가 목표 위치로 정확하고 정밀하게 이동하는지 검증하기 위해
Fig. 6과 같은 실험 환경을 구축하였다.
Fig. 6에서 볼 수 있듯이 상판의 가로 방향을 x축, 세로 방향을 y축으로 정의하고 빨간색 점으로 표시한 네 개의 지점에 드론 정렬 머니퓰레이터의 회전판 중심이 위치하도록 각 20회씩 이동시켰다. 스테이션 상판에 모눈 패턴이 포함된 투명 시트지를 부착하고 회전판의 중심을 점으로 표시를 하였다.
Fig. 6에 빨간색 점으로 표시한 목표 위치와 드론 정렬 머니퓰레이터의 회전판 중심이 도달한 위치 사이의 오차를 기계적인 방법으로 측정하고 오차의 평균과 분산을 계산하여 위치 제어 정확도와 정밀도를 검증하였다.
Fig. 6Experimental environment to verify position control performance of drone pose alignment manipulator
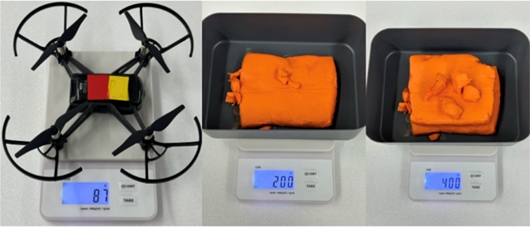
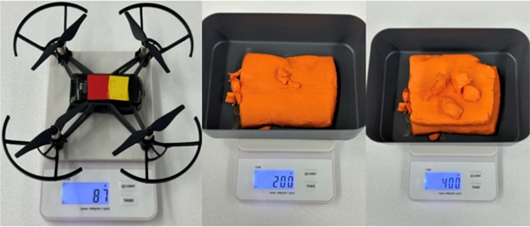
3.1.2 드론 정렬 머니퓰레이터의 페이로드 측정 실험 방법
개발한 드론 자동 충전 스테이션이 실내 식물 공장에서 소형 드론의 충전에 활용될 수 있는지를 검증하기 위해 드론 정렬 머니퓰레이터가 옮길 수 있는 최대 질량으로 페이로드를 확인하였다. 드론 정렬 머니퓰레이터의 페이로드는 회전판의 전자석이 자기력으로 옮길 수 있는 상판 위에 위치한 물체의 최대 질량으로 측정하였다. 실험에서는
Fig. 7과 같이 점토를 계량해 상자에 담고 점토의 질량을 늘려가며 드론 정렬 머니퓰레이터가 특정 질량의 상자를 자기력으로 옮길 수 있는지 반복 실험하였다. 상용 소형 드론의 질량이 87 g이므로 질량을 90 g에서 10 g씩 추가해 실험을 수행하였으며, 최대 질량 근처에서는 1 g 단위로 질량을 증감하며 측정하였다.
Fig. 7Experimental environment for payload measurement of drone pose alignment manipulator
3.1.3 충전 단자 연결부의 충전 가능 범위 검증 실험 방법
드론의 충전 단자와 충전선이 연결되기 위해 드론의 위치와 자세를 드론 자동 충전 스테이션의 충전 단자 연결부를 기준으로 어느 범위 내에서 정렬해야 하는지 반복 실험을 통해 확인하였다. 개발한 드론 자동 충전 스테이션의 충전 단자 연결부를 기준으로 다양한 위치 오차와 자세 오차를 갖도록 DJI Tello를 배치하면서 드론의 충전 단자에 충전선이 연결되는지 반복 실험하였다.
3.1.4 드론 자동 충전 스테이션의 충전 성능 검증 실험 방법
드론 자동 충전 스테이션의 충전 성능을 검증하기 위해 사람이 DJI Tello를 드론 자동 충전 스테이션의 상판에 임의의 위치와 자세로 배치하고
Fig. 4의 구동 알고리즘을 통해 드론을 충전하는 실험을 반복하였다.
Fig. 4의 구동 알고리즘을 다음의 세 단계로 나누어 각 단계를 30회씩 실행하고 각 단계의 성공과 실패를 구분하여 성공률을 계산하였다.
첫 단계에서는 카메라로 드론의 인식표 정보를 처리해 드론의 위치와 자세를 파악하고 드론 정렬 머니퓰레이터가 드론의 위치와 자세에 맞게 움직이는 지 확인하였다. 드론 정렬 머니퓰레이터가 이동해 전자석이 자기력으로 드론을 부착하면 성공한 것으로 판단하였다. 다음 단계에서는 드론 정렬 머니퓰레이터가 드론을 자기력으로 부착하여 충전 가능 범위로 정렬시키는지 확인하였다. 드론 정렬 머니퓰레이터가 드론을 충전 단자 연결부를 기준으로 충전 가능 영역에 정렬하면 성공한 것으로 판단하였다. 마지막으로 드론이 충전 가능 범위에 정렬되었을 때 드론의 충전 단자와 충전선이 연결되는지 확인하였다.
3.2 드론 자동 충전 스테이션 성능 검증 결과
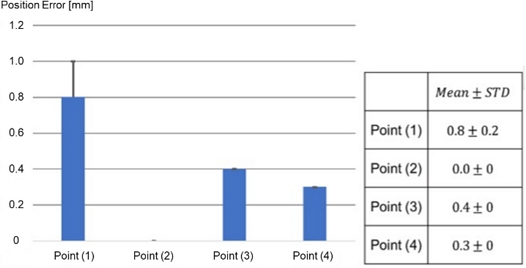
드론 정렬 머니퓰레이터의 위치 제어 성능을 검증하기 위해 목표 위치와 도달 위치 사이의 오차 측정 결과를
Fig. 8에 나타내었다.
Fig. 8의 막대 그래프에서 파란색 막대는 20회의 반복 실험 결과에서 계산한 오차 평균을 나타내고 검은색 오차 막대는 오차의 표준편차를 나타낸다. 가로축의 4개 지점은
Fig. 6의 4개 목표 지점을 나타낸다.
Fig. 8Mean and standard deviation of position error
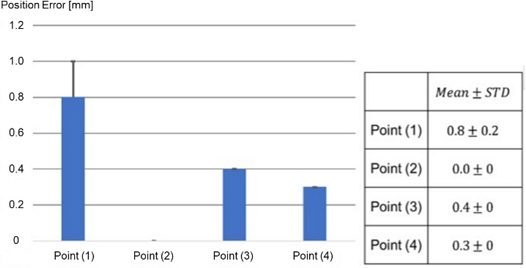
Fig. 8의 표에는 각 목표 지점에서 오차의 평균과 표준편차 값을 나타내었다. 평균 오차는 1번 지점에서 0.8, 2번 지점에서 0, 3번 지점에서 0.4, 4번 지점에서 0.3 mm로 나타났다. 또한 1번 지점을 제외한 모든 지점에서 표준편차가 없었고, 1번 지점에서 표준편차가 0.2 mm로 계산되었다. 실험 결과를 통해 드론 정렬 머니퓰레이터의 위치 제어 정확도와 정밀도가 매우 높음을 확인할 수 있다.
드론 정렬 머니퓰레이터의 페이로드 측정 실험 결과, 머니퓰레이터는 자기력을 이용해 최대 472 g의 물체를 안정적으로 이동시킬 수 있었다. 이는 DJI Tello의 무게인 87 g을 충분히 초과하는 페이로드로, 실내 식물 공장에서 사용되는 대부분의 소형 드론을 운용하기에 적합한 성능임을 입증하였다.
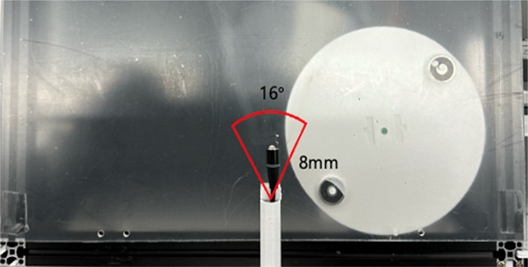
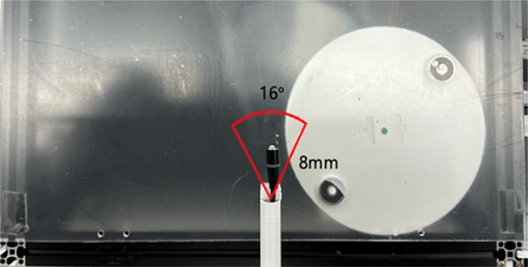
충전 단자 연결부의 성능평가 실험 결과,
Fig. 9의 빨간색 부채꼴 모양과 같이 드론이 충전 단자 연결부를 기준으로 반경 8 mm 이내에 위치하고 시계방향 및 반시계방향으로 ±8
o 이내의 자세 오차를 가질 경우 자기력에 의해 드론의 충전 단자와 충전선이 성공적으로 연결되는 것을 확인하였다.
Fig. 9Mean and standard deviation of position error
충전 성능을 평가하기 위해 드론이 임의의 위치와 자세로 상판에 착륙한 상태에서 자동으로 충전이 이루어지는 과정을 30회 반복 실험하였다. 실험 결과, 첫 단계인 드론의 위치 및 자세 인식 성공률은 100%(30회/30회)로 나타났으며, 두 번째 단계인 드론의 충전 가능 위치로의 정렬 성공률은 93%(28회/30회)였다. 두 번의 실패는 모두 드론을 이동시키는 중에 드론과 회전판의 전자석 연결이 끊어지면서 발생하였다. 마지막으로 충전선이 드론의 충전 단자와 연결되는 성공률은 93%(28회/30회)로 측정되었다. 두 번의 실패 모두 드론의 충전 단자와 충전선이 자력에 의해 연결되려 했으나 충전선의 가장자리 형상이 드론의 충전 단자와 충전선의 연결을 방해하여 충전이 시작되지 않았다.
자동 충전을 위한 단일 시도에서 실패한 경우에도 알고리즘에 따른 재시도 과정을 통하면 최종적으로 모든 실험과 모든 단계에서 완전 자동 충전이 가능하였다.
성능 실험 결과를 종합하면, 개발된 드론 자동 충전 스테이션은 높은 위치 제어 정확도와 충분한 페이로드를 갖추고 있으며, 드론이 착륙한 임의의 위치와 자세에서 안정적으로 충전 과정을 자율적으로 완료할 수 있음을 확인하였다.
4. 결론
본 연구에서는 실내 식물 공장에서 소형 드론을 효율적으로 운용하기 위한 드론 자동 충전 스테이션을 개발하였다. 소형 드론은 제한된 배터리 용량으로 인해 자주 충전이 필요하며, 드론의 충전 과정을 자동화하기 위한 신뢰성 높은 충전 시스템의 개발이 필요하다. 개발한 드론 자동 충전 스테이션에는 유선 충전 방식을 채택하여 충전 효율을 높였고, 드론의 착륙 위치와 자세 오차를 보정하여 충전 가능 영역으로 드론을 정렬할 수 있는 3 자유도 정렬 메커니즘을 설계하였다.
개발된 시스템은 카메라를 이용해 드론의 위치와 자세를 추적하며 드론 정렬 메커니즘을 활용해 임의의 위치와 자세에 착륙한 드론을 충전 가능한 위치로 정렬하였다. 충전 가능한 위치로 정렬된 드론의 충전 단자에는 자기력을 이용해 충전선이 연결되도록 하였다. 구동 알고리즘의 단계별로 재시도 루프를 구성하여 단일 시도에서 충전 과정에 문제가 생기더라도 충전 과정을 자율적으로 반복 시도하여 최종적으로는 충전이 성공적으로 수행되도록 신뢰도 높은 시스템을 개발하였다. 충전 과정을 반복하는 실험을 통해 충전 스테이션의 성능을 검증한 결과, 약 93%의 성공률로 드론을 한 번에 충전선에 연결할 수 있었으며, 실패한 경우에도 재시도 알고리즘을 통해 100% 충전 성공률을 달성하였다.
개발한 시스템은 소형 드론의 자율 충전을 가능하게 함으로써 실내 식물 공장에서 드론 운용의 연속성을 확대하고, 인력 개입을 최소화하여 드론의 무인 운용이 가능하도록 한다. 특히, 드론의 착륙 오차를 보정하는 정렬 메커니즘을 통해 드론의 배터리 충전을 보다 안정적이고 신뢰도 높게 자동화하였다.
향후 연구에서는 다양한 소형 드론 모델에 대한 적용 가능성을 확장하고, 실내 식물 공장을 넘어 다양한 실내 환경에서도 활용할 수 있도록 시스템의 범용성을 높이는 연구가 필요하다. 또한, 드론의 충전 단자 위치가 상이한 경우를 고려하여, 다양한 충전 단자에 대응할 수 있는 추가적인 장치나 알고리즘의 개발이 필요하다.
ACKNOWLEDGMENTS
본 연구는 2023학년도 상명대학교 교내연구비를 지원받아 수행하였음.
REFERENCES
- 1.
Kim, H., Mokdad, L., Ben-othman, J., (2018), Designing UAV surveillance frameworks for smart city and extensive ocean with differential perspectives, Institute of Electrical and Electronics Engineers Communications Magazine, 56(4), 98-104.
10.1109/MCOM.2018.1700444
- 2.
King, A., (2017), The future of agriculture, Nature 544.7651: S21-S23.
10.1038/544S21a
- 3.
Lee, B., Kwon, S., Park, P., Kim, K., (2014), Active power management system for an unmanned aerial vehicle powered by solar cells, a fuel cell, and batteries, Institute of Electrical and Electronics Engineers Transactions on Aerospace and Electronic Systems, 50(4), 3167-3177.
10.1109/TAES.2014.130468
- 4.
Sarunic, P., Evans, R., (2014), Hierarchical model pedictive control of UAVs performing multitarget-multisensor tracking, Institute of Electrical and Electronics Engineers Transactions on Aerospace and Electronic Systems, 50(3), 2253-2268.
10.1109/TAES.2014.120780
- 5.
Lee, D.V., Zhou, J., Lin, W.T., (2015), Autonomous battery swapping system for quadcopter, Proceedings of the 2015 International Conference on Unmanned Aircraft Systems, 118-124.
10.1109/ICUAS.2015.7152282
- 6.
Suzuki, K.A.O., Kemper Filho, P., Morrison, J.R., (2012), Automatic battery replacement system for UAVs: analysis and design, Journal of Intelligent and Robotic Systems, 65(1-4), 563–586.
10.1007/s10846-011-9616-y
- 7.
Jung, S., Lee, T., Mina, T., Ariyur, K. B., (2012), Inductive or magnetic recharging for small UAVs, SAE Technical Papers, 2012-01-2115.
10.4271/2012-01-2115
- 8.
Choi, C. H., Jang, H. J., Lim, S. G., Lim, H. C., Cho, S. H., Gaponov, I., (2016), Automatic wireless drone charging station creating essential environment for continuous drone operation, Proceedings of the 2016 International Conference on Control, Automation and Information Sciences, 132-136.
10.1109/ICCAIS.2016.7822448
- 9.
Rohan, A., Rabah, M., Talha, M., Kim, S.H., (2018), Development of intelligent drone battery charging system based on wireless power transmission using hill climbing algorithm, Applied System Innovation, 1(4), 44.
10.3390/asi1040044
- 10.
Rangel, R. K., Maitelli, A. L., Freitas, J. L., de Araújo, R. F., (2023), Smart drone, wireless charge station and management system applied to air mobility, Proceedings of the 2023 Institute of Electrical and Electronics Engineers Aerospace Conference, 1-19.
10.1109/AERO55745.2023.10115650
- 11.
Mautz, R., (2012), Indoor positioning technologies, application for venia legendi in positioning and engineering geodesy, Habilitation Thesis, institute of geodesy and photogrammetry, department of civil, Environmental and Geomatic Engineering, ETH Zurich.
- 12.
Kim, Y. K., Jung, H. H., Kim, D. N., Kang, T. C., (2022), Design and implementation of drone station charging bed structure for rotary wing drones, The Journal of Korean Institute of Information Technology, 20(6), 41-50.
10.14801/jkiit.2022.20.6.41
Biography
- Da Yeong Han
B.Sc. candidate in the Department of Human Intelligence and Robot Engineering, Sangmyung University. Her research interests are intelligent robotics and robot control system.
- Yu Jin Ho
B.Sc. candidate in Department of Human Intelligence and Robot Engineering, Sangmyung University. Her research interests are autonomous driving and motor control.
- Jae Hwan Bong
Assistant Professor at Department of Human Intelligence and Robot Engineering, Sangmyung University. His research interests are intelligent robotics, human-robot interface, and machine learning.