ABSTRACT
The propulsion system of a projectile is very important for the aerospace industry. To perform space exploration mission, controlling position and posture of the projectile in the terminal stage is very important. In this study, a new lateral thrust system is proposed to control the position and posture of the projectile at the terminal stage. Based on nozzles in a lateral thruster, a high-speed projectile can instantly change its position and posture. After changing its position and posture, reverse thrust is generated to control unnecessary movements for stabilizing. Based on various tests, the operation and performance of the nozzle opening device (NOD) of the separation mechanism were validated. As a result, excellent reproducibility was confirmed with standard deviation of 0.057 ms for the time from the end of igniter operation to the start of NOD separation. The internal pressure of the chamber and NOD separation time were inversely proportional to each other with a linear relation. The internal pressure of the chamber and flight speed of NOD were also proportional to each other. The flight speed of NOD was 37.53 m/s at the maximum expected operation pressure (β), 30.26 m/s at 0.5 β, and 17.05 m/s at 0 psi.
-
KEYWORDS: Projectile, Propulsion system, Lateral thruster, Separation mechanism, Ball lock pin
-
KEYWORDS: 발사체, 추진기관, 측추력기, 분리 메커니즘, 볼 잠금 핀
NOMENCLATURE
Internal Pressure of Chamber
Maximum Expected Operating Pressure
1. 서론
현대 산업에서 항공 및 우주산업 분야는 다양한 국가와 기업의 관심을 받는 분야이며, 발사체의 추진 시스템은 가장 기본이 되는 연구 주제이다. 더 멀리 그리고 정확하게 목표지점으로 발사체를 이송하기 위하여 새로운 추진 시스템 개발이 이루어지고 있다. 예를 들어, 구조 설계 변경을 기반으로 경량화한 시스템은 한정된 에너지원으로 더 오랜 기간 임무를 수행할 수 있고, 생산 과정에서도 티타늄과 같은 고가의 원재료 사용량을 절감시킴으로써 생산 단가를 낮출 수 있다. 또한 정확한 임무 수행을 위한 제어 시스템 개발, 신소재 개발, 공정기술의 개선과 같은 연구들도 진행되고 있다[
1-
3]. 본 연구에서는 OO개의 노즐개방장치를 이용한 측추력 생성 시스템을 제안하였다.
Ball Lock Pin 메커니즘을 이용한 구속 방법은 오래전부터 사용된 방법이지만 현대에도 꾸준히 새로운 메커니즘 개발에 사용되는 시스템이다. Xia는 Flexible Robotic Joint를 제안하며 Self-locking System을 위해 Ball-lock 기반의 Clamping Mechanism을 사용하였다. 강구와 빗면을 이용하여 간소하게 Self-locking을 구현하였지만 높은 하중의 시스템에서는 적용이 힘든 구조이다[
4]. Lee와 Barletta는 Piston과 Cam을 이용하여 높은 하중에서 사용이 가능한 Ball Locking System을 제안하였다[
5,
6]. 하지만 다소 복잡한 구조로 이루어져 있어 유지 보수가 어려우며 협소한 공간에서 사용하기에는 적절하지 못한 구조이다. Yun은 튜브 안의 가스 폭발을 기반으로 Ball을 구동하여 기어를 회전시키며 벨트를 작동하는 메커니즘을 제안하였다[
7]. 2절에서는 앞선 시스템의 단점을 보완한 Ball Lock Pin 기반의 측추력 생성을 위한 신규 노즐개방장치를 제안하였다. 신규 시스템은 외부 전원으로 점화기만을 사용하여 노즐개방장치의 분리 메커니즘이 기계적으로 작동하도록 설계하였다. 3절에서는 공압 시험을 기반으로 본 연구에서 제안한 신규 메커니즘의 구동 여부를 확인하였다. 점화기 인가 신호(Fc), 노즐개방장치의 위치 확인용 신호(BLV), 챔버 내부 압력(P) 세가지 신호를 측정하여 메커니즘의 작동을 분석하였다. 단축 공압 시험은 시스템의 재현성 확인을 위하여 0psi에서 4회 반복 시험을 진행하였고, 추가로 다양한 압력 조건에서 다축(5축) 시험을 4회 진행하였다. 4절에서는 단축과 다축 시험 결과를 분석하고 Fc 신호와 BLV신호를 기반으로 노즐개방장치의 작동 메커니즘을 자세히 분석하였다. 노즐개방장치가 노즐 몸체에서 이탈 시 충분한 속도를 가지지 못하면 발사체와 충돌이 발생하며 기체에 손상을 초래할 수 있으므로, 노즐개방장치의 분리 후 비행 속도를 측정하였다. 마지막 5절에서는 본 연구의 결론 그리고 향후 연구에 관한 내용을 기술하고 있다.
2. 측추력 제어용 신규 노즐개방장치
2.1 Ball Lock Pin 구동 시스템
Fig. 1은 Hones가 제안한 Space Shuttle Life-science Experiments를 위한 해제 메커니즘의 구성을 보여주고 있다[
8]. 3개의 볼을 이용하여 솔레노이드 하우징과 외부의 슬리브를 연결하여 하중이 외부 슬리브로 전달되도록 설계하였다. 경사각이 있는 플런저를 이용하여 3개의 볼이 중심축으로 이동하는 것을 억제하고 솔레노이드로 고정되어 있다. 해제 메커니즘은 솔레노이드에 에너지가 공급되면서 플런저가 해방되고 볼이 중심축으로 이동하며 구속력을 상실하며 작동되는 시스템이다. 하지만 전기 신호 장치를 사용하였기 때문에 구동을 위한 추가적인 전원 공급이 필요한 단점을 가지고 있다. 또한 이러한 복잡한 구조의 시스템은 제약된 공간에서 사용하기에 어려운 단점이 존재한다.
Fig. 1Release mechanism flight unit

Fig. 2는 본 연구에서 제안한 신규 노즐개방장치와 노즐 몸체를 구속하기 위하여 사용된 Ball Lock Pin 시스템의 볼과 홈의 형상을 보여주고 있다. 접촉응력이 인장강도의 절반 이하 조건에서 강구와 홈이 30°로 접촉하기 위하여 노즐 몸체의 홈 반경을 강구 반경의 1.36배로 설계하여 점 접촉하도록 제작하였다. 마찰에 의한 적용하중을 무시하였을 때, 노즐과 볼의 접촉부에서 발생하는 접촉응력을 최소화 하기 위하여 Concave 접촉이 발생하도록 설계하였으며, 접촉응력은 반구 상단부에 균일하중이 작용하는 가정하에 계산하였다.
Fig. 2Assembled ball lock system with steel ball and socket

2.2 노즐개방장치의 구동 메커니즘
Fig. 3은 발사체의 종말 단계에서 사용되는 노즐개방장치의 실제 장착 모습과 모식도를 보여주고 있다. 노즐 몸체에는 측추력 발생을 위하여 원주 방향으로 설치된 OO개의 노즐에 노즐개방장치가 장착되어 있다. 본 연구에서 제안한 Ball Lock Pin 노즐개방장치는 노즐 마개, 피스톤, 전단핀, 그리고 강구로 구성되어 있다. 노즐개방장치는 강구와 노즐 몸체의 홈으로 구속되어 있으며, 내부 피스톤은 전단핀으로 노즐 마개와 조립되어 있다.
Fig. 3Schematic diagram of the nozzle opening device

점화기에 전류 신호가 인가되어 열선 온도가 화약의 점화 온도까지 상승하면 화약이 발화하며 노즐개방장치의 내부에 압력이 생성된다. 생성된 압력이 전단핀의 파손 한계까지 다다르면 전단핀이 파손되며 구속되어 있던 피스톤이 노즐 마개 끝단까지 전진하게 된다. 본 과정이 노즐개방장치의 분리 메커니즘이며
Fig. 4에 자세히 설명되어 있다. 발사체의 종말 단계에서 노즐개방장치가 노즐 몸체에서 분리되면 개방된 노즐로 연소가스가 배출되며 측면 추력을 발생시키고, 그 힘으로 고속 비행중인 발사체의 위치와 자세를 순간적으로 변화시킬 수 있다. 발사체의 이동과 방향 전환이 완료된 이후에는 반대 방향의 노즐개방장치를 작동시켜 역추력을 발생시켜 안정화한다. 본 시스템은 기계적 구속 장치를 사용하였으므로 점화 신호를 제외한 전기적 장치가 사용되지 않는다. 그러므로 시스템 작동을 위한 추가적인 전원 공급이 필요 없으며 이에 따른 무게 및 부피 감소 효과를 가져올 수 있다. 또한 부품수가 적어 유지 보수에서도 강점이 있다.
Fig. 4Overall procedure of nozzle opening device

3. 시험 장치 구성 및 시험
3.1 시험 장치 구성
단축 시험은
Fig. 5(a)에서 보는 것과 같이 1개의 노즐개방장치만 지그에 장착 후 챔버 내부의 압력이 없는 상태로 시험을 진행하였기 때문에 비교적 작은 크기로 시스템 구성이 이루어져 있다. 다축 시험은 5개의 노즐개방장치가 장착되며 실제 작동 조건인 최대예상작동압력(β)에서 시험이 진행되므로
Fig. 5(b)처럼 지그와 시스템의 크기가 비교적 크다. 본 시험 장치는 추진기관의 최대예상작동압력 이상의 조건에서도 시험을 진행할 수 있도록 단순한 압력 챔버 형상으로 제작하였다. 하지만 노즐개방장치의 장착 부위는 실제 추진기관과 같은 시스템으로 구성하여 시험을 진행하였다.
Fig. 5(a) Test jig configuration of single axis and (b) Multi-axis
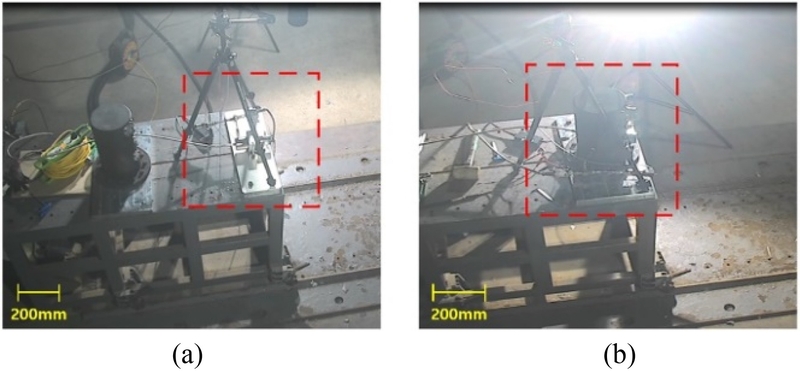
Fig. 6은 Fc 신호와 BLV 신호의 데이터가 의미하는 물리적 현상을 모식도로 나타냈다. 점화기의 발열선은 외부의 전기 신호로 작동하여 그 열이 기폭약으로 전달된다. 기폭약이 자동 점화 온도에 다다르면 발화가 일어나고 노즐개방장치 내부의 압력을 형성하게 된다. 이때, 외부에서 점화기에 인가된 전류 신호가 Fc (Firing Current)신호이다. BLV (Break Line Voltage) 신호선은 파단 시점을 기반으로 노즐개방장치의 이탈을 확인하기 위한 물리적 장치이다. BLV 신호선은 노즐 마개 전방을 가로지르며 접착제로 노즐 몸체 외부에 고정되어 노즐개방장치의 이탈에 미치는 영향을 최소화하였다. 즉, 해당 신호 값이 급격히 감소하는 시점이 단선을 의미하며 노즐개방장치의 이탈 시작 시점으로 볼 수 있다. Fc 신호가 상승 후 급감하는 구간을 노즐개방장치의 내부 압력이 형성되는 시간으로 판단하였으며, 급감하는 이유는 점화기 내부의 Fc 신호선이 화약 발화로 생성된 열에 의하여 파손되기 때문이다. 그러므로 Fc 신호가 급감하는 시점은 점화기 작동으로 인해 전단핀의 파손을 일으킬 수 있는 압력이 형성되는 시점으로 볼 수 있다. 해당 시점에서 노즐개방장치 분리 메커니즘의 구동이 시작되며 BLV 신호가 급감하는 시점이 노즐개방장치가 노즐 몸체로부터 분리되는 구간이므로 Fc 신호의 감소 시점에서 BLV 신호의 감소 구간이 본 연구에서 제안한 노즐개방장치의 작동 시간을 의미한다.
Fig. 6Definition of separation mechanism of nozzle opening device with Fc and BLV signal

3.2 단축 및 다축 공압 시험
단축 공압 시험은 본 연구에서 제안한 신규 노즐개방장치 메커니즘의 정상 작동 및 재현성 확인을 위하여 챔버 내부 압력이 0 psi에서 한 개의 노즐개방장치만 장착하여 동일 조건으로 4회 반복 시험을 진행하였다.
단축 공압 시험중 Run 1 결과에서 Fc 신호가 급감하는 시점인 2.4 ms는 점화기 내부의 온도 상승으로 인하여 열선이 끊어지는 시점으로써 전단핀을 파손하는 점화기 내부의 압력이 형성된 시점으로 볼 수 있다. BLV 신호는 1.6 ms에 급격하게 감소하였는데 이는 노즐개방장치가 몸체에서 이탈하며 물리적으로 신호선을 단선시키는 시점이다.
다축 공압 시험은 본 연구에서 제안한 신규 노즐개방장치 메커니즘의 실제 사용 조건에서의 운용 가능성을 확인하기 위하여 최대예상작동압력(β), 0.5 β, 0psi의 챔버 내부 압력 조건에서 5개의 노즐개방장치를 장착한 지그를 이용하여 시험을 진행하였다. Run 5는 최대예상작동압력 조건에서 진행하였고, 노즐개방장치 5개의 분리 메커니즘 평균 작동 시간은 0.80 ms를 나타냈다. Run 6은 0.5β의 압력 조건에서 시험이 진행되었으며, 평균 작동 시간은 0.84 ms로 확인되었다. Run 7과 Run 8은 향후 계획중인 지상연소시험의 시험장 환경을 고려하여 5개의 점화기 전류 인가 신호를 하나로 결합하여 진행하였다. 그 결과, Run 7의 평균 작동 시간은 0.89 ms, Run 8은 0.92 ms의 값을 나타냈다.
Fig. 7은 최대예상작동압력 조건에서 시스템을 작동하였을 때의 Fc와 BLV 신호 데이터를 보여주고 있다.
Fig. 7Fc and BLV signal of multi-axis test (Run 5)

3.3 시험 결과
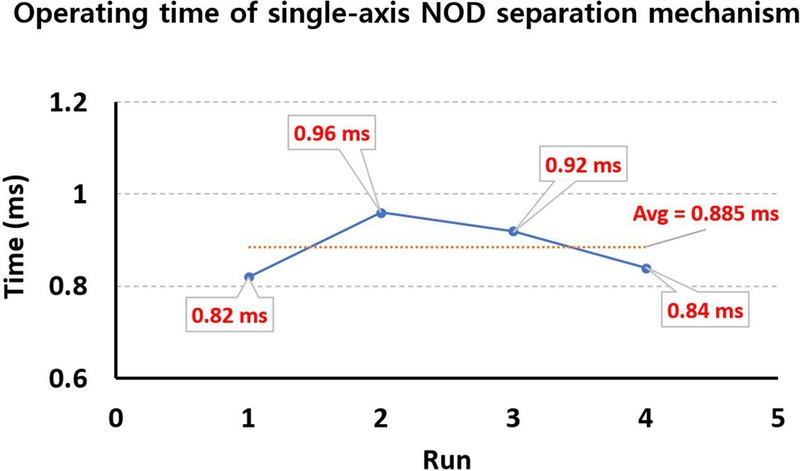
단축 노즐개방장치 시험 결과, 점화기 작동 종료에서 노즐 이탈까지를 의미하는 노즐개방장치의 분리 메커니즘의 작동 평균 시간은 0.886 ms이며 표준 편차는 0.057 ms로 매우 우수한 재현성을 확인하였으며 이를 정리하여
Fig. 8에서 보여주고 있다. 다축 노즐개방장치의 시험 결과, 분리 작동 메커니즘의 구동 시간이 챔버 내부의 압력에 반비례하며 선형 관계인 것을
Fig. 9에서 보여주고 있다. 노즐개방장치의 분리 메커니즘은 점화기 내부 화약의 발화로 인해 생성된 압력으로 작동하므로 챔버 내부의 압력과는 독립적인 관계이다. 하지만 BLV 신호의 감소는 챔버 내부의 압력에 의해 분리되는 노즐개방장치가 BLV 신호선을 물리적으로 파손하여 발생하기 때문에 본 연구에서 측정한 분리 메커니즘의 작동 시간은 챔버 내부 압력의 영향을 미미하게 받는다. 예를 들어, 0 psi의 경우 점화기 생성 압력(약 0.35 β)으로 노즐개방장치가 분리되며 BLV 신호선을 단선시킨다. 하지만 0.5 β 또는 β의 압력으로 노즐개방장치가 분리되면 더 빠른 속도로 BLV 신호선이 파손된다. 그러므로
Fig. 9에서 볼 수 있듯이, 챔버 내부의 압력이 높을수록 노즐개방장치의 분리 메커니즘 작동 시간이 감소하는 경향을 보이며 이 둘은 선형 관계를 나타낸다.
Fig. 8Mean time of the separation mechanism in single axis test

Fig. 9Mean time of the separation mechanism in multi-axis test

노즐개방자치가 노즐 몸체에서 분리된 이후 발사체와 충돌이 발생하지 않기 위해서는 충분한 속도로 이탈해야 한다. 낮은 속도로 노즐개방장치가 몸체에서 분리될 경우, 발사체와 충돌이 발생하고 기체 손상을 초래하여 임무 수행 중 추락 사고가 발생할 수 있다. 본 연구의 단축 시험에서 노즐개방장치의 평균 비행 속도는 약 17.25 m/s로 관측되었다.
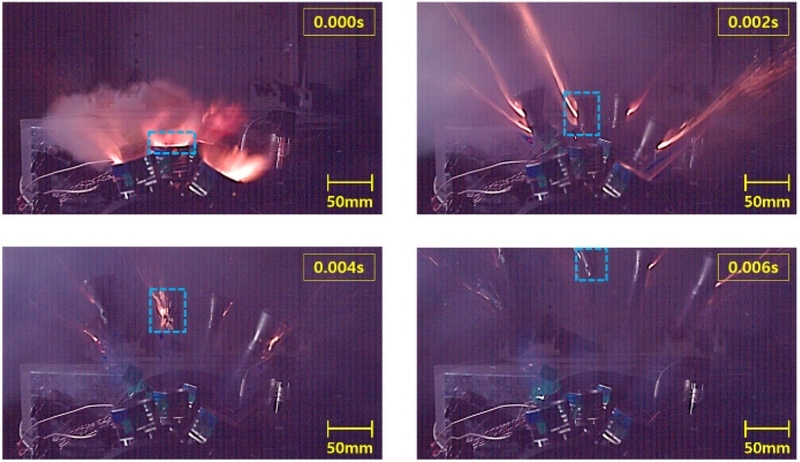
Fig. 10은 Run 5 (Multi-axis)의 실제 시험 사진이다. 챔버 내부 압력이 β (Run 5)인 다축 시험에서 노즐개방장치의 평균 비행 속도는 37.53 m/s, 0.5 β (Run 6)에서 30.26 m/s, 그리고 0 psi (Run 7 및 Run 8)에서 17.05 m/s로 관측되었다. 즉, 챔버 내부의 압력이 높을수록 전단핀 파괴 이후 노즐개방장치의 이탈 후 비행 속도가 증가되는 것을 확인할 수 있었고, 그 속도는 충돌사고를 유발하지 않는 충분한 속도로 판단되었다.
Fig. 10Multi-axis test (Run 5)
4 결론 및 향후 연구
본 연구에서는 OO개의 노즐개방장치를 이용하여 측추력을 생성할 수 있는 신규 시스템을 제안하고 구동 조건에 따른 성능 평가를 진행하였다. 노즐개방장치는 Ball Lock Pin 시스템을 이용하였고, 홈의 반경을 강구 반경보다 크게 설계하여 접촉 압력을 감소시키는 오목한 구조를 제안하였다. 노즐개방장치의 작동 메커니즘은 점화기를 이용하여 내부 피스톤에 압력을 형성하고 그 압력을 이용하여 피스톤을 구속하고 있는 전단핀을 파손하며 시작된다. 전단핀이 파손되며 내부 피스톤이 구속력을 잃고 노즐 마개까지 전진하는데, 이 과정에서 노즐개방장치의 몸체에 구속되어있던 강구가 탈락하며 노즐개방장치가 챔버 내부의 압력을 기반으로 몸체에서 분리된다.
새롭게 제안한 분리 메커니즘의 작동 검증을 위하여 다양한 조건의 압력 조건에서 점화기 인가 신호(Fc)와 노즐개방장치 분리 신호(BLV)를 측정하여 시스템의 성능을 분석 및 평가하였다. 단축 시험 결과, 분리 메커니즘 작동 시간의 표준편차가 0.057 m로 시스템의 우수한 재현성을 확인하였다. 다축 시험을 통해서는 다양한 사용 환경의 압력 조건에서 노즐개방장치의 정상적인 작동을 확인하였다. 또한, 최대예상작동압력(β)에서 노즐개방장치의 이탈 이후 평균 속도가 37.53 m/s로 충분한 속도로 몸체에서 분리되는 것을 확인하였다.
이론적으로 노즐개방장치의 구동 메커니즘은 점화기 내부의 압력을 기반으로 작동하기 때문에 챔버 내부의 압력과는 독립적으로 구동한다. 하지만 본 연구에서 측정한 BLV 신호는 노즐개방장치가 분리되며 단선으로 인해 신호 수치가 급감하게 된다. 이때, 챔버 내부 압력이 높을수록 노즐개방장치의 순간 이탈 속도가 증가하게 되므로
Fig. 6의 분리 메커니즘 작동 시간은 챔버 내부 압력과 완전히 독립적이라고 볼 수 없다. 그러나 기구 메커니즘에서 내부의 물리적인 작동 시간이 지배적이므로 챔버 내부 압력의 증가로 인한 노즐개방장치의 순간 발사 속도 차이를 무시하고 단축 및 다축 시험에서 평균 약 0.86 ms로 비슷한 수치를 나타냈다.
향후 연구에서는 전방의 노즐개방장치 분리 후 반대편의 노즐개방장치를 개방하여 발생하는 역추력을 기반으로 종말 단계에서 Nulling 시스템의 작동 확인을 계획하고 있다. 1차 개방으로 인한 위치 및 자세 변환 완료 후 2차 개방으로 인한 안정화 시스템의 작동을 검증하고, 실제 발사체와 조립하여 전체 시스템의 작동 여부를 확인함과 동시에 열 구조 및 기계적 구조 안정성을 검증할 예정이다. 추가로 점화기의 CBT (Closed Bomb Test)를 진행하며 Fc 신호와 노즐개방장치의 피스톤 내부의 압력을 비교 측정하여 본 연구에서 제안한 분리 메커니즘의 작동 원리도 검증할 계획이다.
REFERENCES
- 1.
Meke, A. S., Dincer, I., (2024), Design and assessment of an advanced renewable energy system with hydrogen and monomethylhydrazine production for space shuttles, Energy, 308, 132633.
10.1016/j.energy.2024.132633
- 2.
Goodman, J., (2021), Roland jaggers and the development of space shuttle powered explicit guidance (peg), Proceedings of the AIAA Scitech 2021 Forum.
10.2514/6.2021-2021
- 3.
Bernardo, P., Iulianelli, A., Macedonio, F., Drioli, E., (2021), Membrane technologies for space engineering, Journal of Membrane Science, 626, 119177.
10.1016/j.memsci.2021.119177
- 4.
Xia, Y., Yang, M., Zhou, T., Wang, H., Xie, N., (2024), Design and position-tracking control of a flexible joint based on the tendon-sheath mechanism, Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science, 238(16), 8074-8092.
10.1177/09544062241238891
- 5.
Lee, J., Han, J.-H., (2025), Separation and release devices for aeronautical and astronautical systems: A review, International Journal of Aeronautical and Space Sciences, 26(1), 131-161.
10.1007/s42405-024-00802-9
- 6.
Barletta, A., (2020), Design and development of a robust chuck mechanism for the mars2020 coring drill, Proceedings of the 45th Aerospace Mechanisms Symposium.
- 7.
Yun, P., Nam, H., Lee, S., Shin, J., Kwon, S., Hong, Y., (2010), A study of retractor pretensioner gear using cycloidal tooth profile, Proceedings of the Korean Society of Precision Engineering Conference, 1227-1228.
- 8.
Jones, H. M., Daniell, R., (1984), The design and development of a release mechanism for space shuttle life-science experiments, The 18th Aerospace Mech. Symp.
Biography
- Kwang Joon Kim
Senior Researcher in Agency for Defense Development. His research interest is design of mechanical control mechanism without external power source and light weight structure.
- Sang Youn Lee
Principal Researcher in Agency for Defencse Development. His research interest is structural design of propulsion system and thrust vector control system.
- Shin Hoe Kim
Principal Researcher in Agency for Defencse Development. His research interest is design and structural analysis of solid rocket motor proplellant grain.
- Sun Jae Rhee
Manager in Hanwha Aerospace. His research interest is optimizing solid rocket manufacturing.
Citations
Citations to this article as recorded by