ABSTRACT
This paper details the design and development of a robotic joint actuator that combines a frameless BLDC motor with a two-stage stepped planetary gear reducer, as well as a custom-built controller for precise position control. The rotor is physically coupled to a hollow sun gear shaft to facilitate internal cable routing, and the actuator features a high-resolution absolute encoder utilizing the BiSS-C protocol. The controller includes a 3-phase H-bridge driver, differential signal conversion for encoder communication, and a CAN interface for host communication. Position control is achieved through a PID loop operating at 1 kHz. A prototype actuator and controller have been fabricated, and step response tests were conducted. Experimental results indicate stable and accurate tracking of position commands, with a short settling time of 0.04773 seconds. These findings confirm the effectiveness of the integrated actuator system for robotic joint applications. Future work will focus on optimizing internal cable space and implementing sensorless control algorithms.
-
KEYWORDS: Robotic joint, Frameless BLDC motor, Planetary gear reducer, Actuator, Motor controller
-
KEYWORDS: 로봇 관절, 프레임리스 BLDC 모터, 유성기어 감속기, 액츄에이터, 모터 제어기
1. 서론
최근 로봇 기술의 고도화와 다양화에 따라, 로봇의 구동을 담당하는 액츄에이터에 요구되는 성능 수준이 점차 높아지고 있다. 특히 족형 로봇, 협동로봇, 휴머노이드 로봇과 같이 정밀한 동작과 높은 토크, 빠른 응답성이 동시에 필요한 분야에서는, 기존의 산업용 액츄에이터로는 한계가 드러나고 있다. 로봇 액츄에이터는 단순히 회전 운동을 발생시키는 기능뿐만 아니라, 경량화, 소형화, 고정밀도, 저소음, 제어기 통합, 통신 기능, 내구성 등 다양한 기술 요건을 동시에 만족해야 하며, 이는 고성능 일체형 모듈 형태의 액츄에이터 개발을 요구하는 배경이 된다.
이러한 조건을 충족시키기 위한 핵심 기술 중 하나가 바로 Frameless BLDC 모터의 활용이다. Frameless 모터는 외부 하우징 없이 고정자(Stator)와 회전자(Rotor)만으로 구성되어 있어, 사용자가 직접 설계한 구조물에 통합하기 용이하다. 특히 모터 하우징과 베어링 등의 외부 구성 요소를 생략함으로써 경량화가 가능하며, 모터 내부 공간의 활용도를 극대화할 수 있다. 토크 대 중량비(Torque-to-weight Ratio)가 높고 열 방출 효율이 좋기 때문에, 로봇 관절 내부에 직접 적용되기에 매우 적합한 솔루션이 될 수 있다[
1,
2].
하지만 Frameless BLDC 모터를 직접 구동(Direct-drive) 방식으로 적용할 경우 충분한 토크 확보가 어렵고, 출력 샤프트의 설계와 체결에서 고정성과 정밀도를 확보하기 위한 별도의 기구 설계가 필요하다. 이러한 문제를 해결하기 위해서는 감속기와의 통합이 필수적이다. 특히 소형 로봇에서는 고효율이면서도 콤팩트한 감속기를 필요로 하며, 이에 적합한 방식으로 유성기어(Planetary Gear) 감속기가 널리 활용된다. 유성기어 감속기는 중심의 선기어(Sun Gear), 그 주변의 유성기어들(Planet Gears), 그리고 외곽의 링기어(Ring Gear)로 구성되며, 토크 전달 효율이 높고 동심구조로 인한 균형성과 내구성이 우수하다.
그 중에서도 Stepped 유성기어 감속기는 다단 감속을 통해 더 높은 감속비를 구현할 수 있으며, 특히 축 방향으로 길이를 절약할 수 있어 공간 제약이 심한 로봇 관절 구조에 최적화된 형태로 적용되고 있다[
3,
4]. 이러한 감속기 구조는 고속 회전의 모터를 저속 및 고 토크로 변환하는 데 매우 효과적이지만, 동시에 모터와 감속기의 정밀한 정렬 및 체결, 엔코더의 장착 위치, 축 중심을 통한 배선 설계 등 여러 설계 상의 난제를 수반한다.
로봇 관절의 위치 제어를 위해서 앱솔루트 엔코더(Absolute Encoder)가 많이 사용되며, 최근에는 산업용 고정밀 제어 시스템에서 BiSS-C 통신 프로토콜을 지원하는 엔코더가 보편적으로 사용되고 있다. BiSS-C는 비동기식 직렬 통신 방식으로, 낮은 지연시간과 높은 내성, 차동 신호(Differential Signal)를 통한 신뢰성 높은 데이터 전송이 가능하다는 장점이 있다. 하지만 BiSS-C 프로토콜은 대부분의 MCU에서 직접 지원되지 않으며, 이를 처리하기 위해서는 SPI 기반의 마스터 클럭 생성을 포함한 커스텀 회로와 RS-422 기반 차동 통신 트랜시버 설계가 반드시 요구된다.
이러한 기술적인 요구사항을 모두 충족하면서 하나의 일체형 액츄에이터 시스템으로 통합된 설계를 구현하는 것은 매우 도전적인 과제이다. 로봇의 전체적인 설계 자유도를 확보하면서도, 개별 구성요소의 성능을 손상시키지 않고 정밀하게 통합하기 위해서는, 기계 설계, 회로 설계, 펌웨어 개발, 통신 인터페이스 설계 등이 유기적으로 결합되어야 한다. 또한, 센서와 모터의 데이터를 실시간으로 처리하고 외부 제어기와 통신할 수 있는 내장형 제어기(Embedded Controller)의 설계 역시 필수적이다. 특히 소형화된 제어기 보드는 열 해소 구조와 배선 구조까지 고려해야 하며, 시스템 통합성 측면에서 기술적으로 높은 수준의 완성도를 요구 받는다.
이와 같은 통합 액츄에이터 시스템에 대한 연구는 국내외에서도 활발히 진행되어 왔다. Elery et al. [
5]은 Frameless BLDC 모터와 Stepped 유성기어 감속기를 사용한 무릎-발목 구동형 의족을 설계한 내용을 다룬다. 낮은 감속비와 고토크 저속 모터의 조합은 낮은 기계적 임피던스와 높은 백드라이버빌리티를 제공한다. 하지만 상용 제품의 제어기 사용으로 일체화 측면에서 한계가 존재한다. Nandor et al.[
6]은 외골격 관절을 위한 두 가지 구동기 후보의 차이를 분석하기 위해 두 개의 액츄에이터를 개발하였다. 두 액츄에이터 모두 동일한 Frameless BLDC 모터와 유사한 기어비를 사용하였으며, 하나는 상용 하모닉 드라이브를, 다른 하나는 맞춤형 2단 유성기어 감속기를 사용하였다. 유성기어 기반 액츄에이터가 우수한 성능을 보였다.
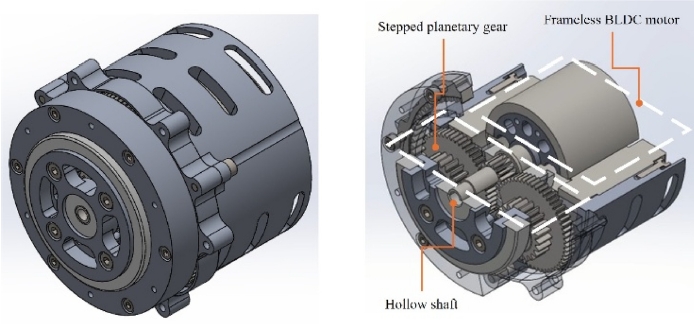
이에 본 연구에서는 Frameless BLDC 모터와 Stepped 유성기어 감속기를 통합한 중공축 구조의 로봇 관절용 액츄에이터를
Fig. 1과 같이 설계[
7]하고, 이를 위한 전용 BLDC 모터 컨트롤러를 개발하였다. 제안된 시스템은 Kollmorgen사의 TBM-7631-A Frameless 모터를 기반으로 하며, 기계적 체결을 통해 회전자와 중공 샤프트를 연결하고, BiSS-C 통신을 지원하는 앱솔루트 엔코더를 탑재하였다. 또한, 고속 PID 제어 루프(1 kHz), RS-422 기반 차동 신호 변환, CAN 통신 기능을 포함한 제어 보드를 설계 및 제작하였으며, 실험을 통해 스텝 응답 특성을 정량적으로 평가하였다.
본 논문에서는 해당 액츄에이터 및 제어기 시스템의 설계 과정, 시제품 구현, 통신 구조, 제어기 동작 방식, 실험 결과를 자세히 기술하고, 추후 개선 방향으로 센서리스 제어 알고리즘(Sensorless Control) 통합과 중공축 설계 개선, 시스템 소형화 전략 등에 대해 논의하고자 한다.
논문의 구성은 다음과 같다. 2장에서는 로봇 관절용 액츄에이터 설계와 관련하여 Frameless BLDC 모터의 회전자 체결을 위한 회전축 설계 그리고 Stepped 유성기어 감속기 모듈 설계에 대한 내용을 상세히 기술하며, 3장에서는 BLDC 모터 컨트롤러 설계와 관련하여 회로 블록도를 가지고 기술한다. 4장에서는 Step 응답 실험 결과를 제시하고, 5장에서는 논의를 제시하며, 마지막으로 6장에서는 결론과 함께 향후 연구 방향을 제시한다.
2. 로봇 관절용 액츄에이터 설계
2.1 Frameless BLDC 모터의 회전자 체결을 위한 회전축 설계
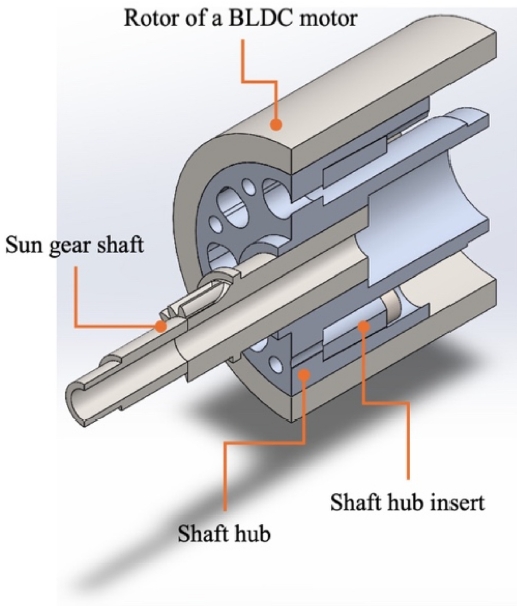
Frameless BLDC (Brushless DC) 모터는 고정자와 회전자가 분리되어 있어서 각각은 로봇의 관절 형상에 따라서 자유롭게 설계가 가능하다. 먼저 회전자 설계에서는 케이블이 관절을 통과할 수 있도록 중공축 형태를 선택하였고, 다음으로 이 중공축과 회전자를 결합하기 위해서 화학적 물질을 사용한 결합 대신 물리적 결합 방법을 채택하였다. 그 이유는 모터의 회전자와 중공축 분해 과정에서 물리적 결합 방법이 화학적 물질을 사용한 방법 보다 더 유리하기 때문이다.
Fig. 2는 회전자와 중공축을 결합한 모습의 단면도를 보여준다. 회전자 어셈블리는 회전자, 선 기어 샤프트(Sun Gear Shaft), 샤프트 허브(Shaft Hub), 그리고 샤프트 허브 인서트(Shaft Hub Insert)로 구성된다[
8]. 선 기어 샤프트는 중공축 형태이고, 샤프트 허브와 결합된다. 샤프트 허브는 회전자의 내부에 삽입이 되고, 샤프트 허브 인서트는 샤프트 허브 속으로 들어가게 된다. 회전자와 샤프트 허브가 물리적으로 체결되는 방법은 다음과 같다. 샤프트 허브와 샤프트 허브 인서트가 볼트로 체결되는 과정에서 샤프트 허브의 외벽이 벌어지고 회전자의 내벽을 강하게 밀어내면서 물리적으로 체결된다.
2.2 Stepped 유성기어 감속기 모듈 설계
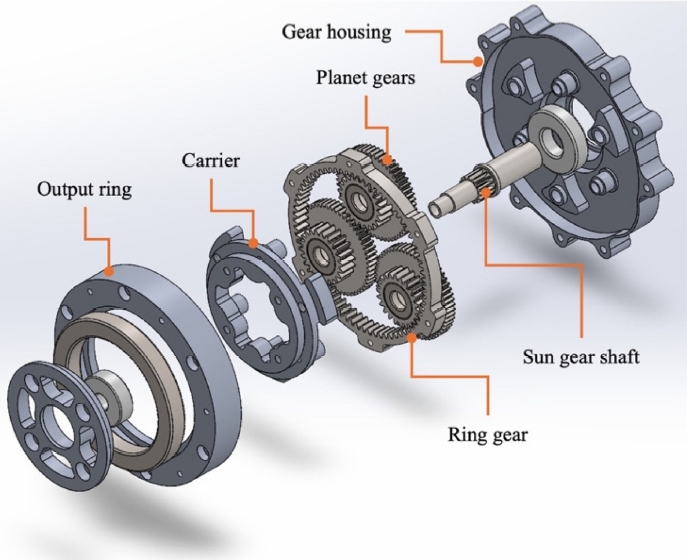
액츄에이터의 축 방향 길이를 고려하여 감속기 모듈을 2단으로 구성된 Stepped 유성기어 시스템으로
Fig. 3과 같이 설계하였다. 이 기어 시스템은 유성기어를 2단으로 구성하여 입력 축인 선 기어 샤프트가 첫 번째 단유성기어를 회전시키면 두 번째 단 유성기어가 링 기어(Ring Gear)를 회전시키는 구조이다. 최종적으로 링 기어가 출력 기어가 되고 여기에 출력 링(Output Ring)을 부착하여 감속기 프레임을 구성하였다.
Table 1에 기어들의 잇수를 정리하였다. 선 기어와 유성 기어 1단 사이의 기어 비는 3.6667 : 1이고 유성 기어 2단과 링 기어 사이의 기어 비는 3.2273 : 1이다. 따라서 선 기어(입력 기어)와 링 기어(출력 기어) 사이의 기어비는 11.8335 : 1이다.
2.3 액츄에이터 시제품 제작
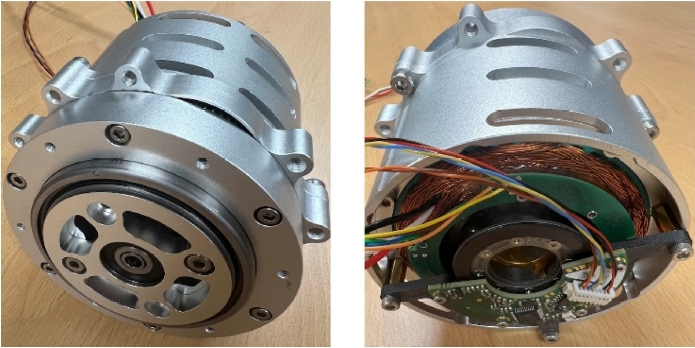
액츄에이터의 모터 부분과 감속기 부분의 설계에 따라서 시제품을 제작하였다. 감속기의 기어 부품은 스테인리스 스틸(Stainless Steel)로 가공되었고, 그 기어 부품을 제외한 나머지 부품은 알루미늄 합금(AL6061)으로 가공되었다. 모터의 위치제어를 위해서 앱솔루트 엔코더(Absolute Encoder)를 액츄에이터의 입력 축에 장착하였다. 액츄에이터의 입력 축에 장착된 앱솔루트 엔코더를 이용하여 출력 축 회전 각도를 제어하기 위해서는 멀티턴(Multi-turn) 기능이 있는 앱솔루트 엔코더를 선택하였다.
Fig. 4에 제작된 액츄에이터의 시제품 형상을 나타내었고,
Table 2에 액츄에이터의 시방서(Specification)를 정리하였다.
3. BLDC 모터 컨트롤러 설계
3.1 회로도 설계
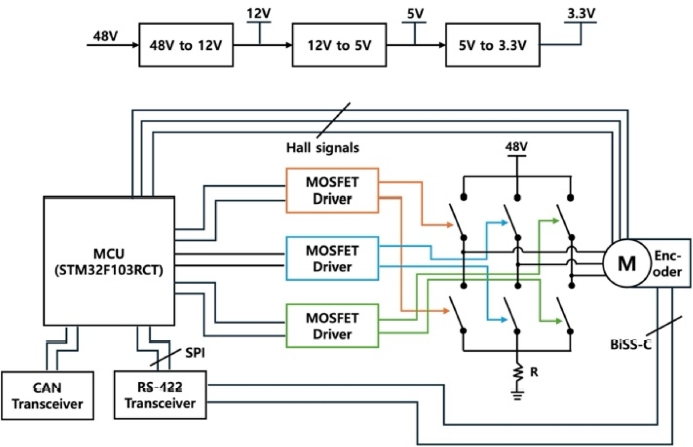
Fig. 5에 BLDC 모터 컨트롤러의 회로를 블럭도로 나타내었다. 블록도 중에서 BLDC 모터 컨트롤러의 전원부는 48 V 외부 DC전원을 입력 받아 1 2 V로, 12 V는 다시 5 V로, 마지막으로 5 V는 3.3 V로 DC-DC 강압 변환을 한다. 12 V는 모스펫(MOSFET) 드라이버, 5 V는 홀센서와 앱솔루트 엔코더, 그리고 3.3V는 MCU의 전원 공급으로 사용된다.
BLDC 모터 구동을 위해서 6개의 N채널 MOSFET을 이용하여 H-브릿지(H-bridge) 회로를 구성하였다. H-브릿지의 High 사이드와 Low 사이드의 MOSFET 동작을 on/off하기 위해서 드라이버 IC칩을 사용하였다. MOSFET 드라이버 회로는 하프-브릿지(Half-bridge)용 드라이버 3개를 사용하여 BLDC 모터의 3상을 각각 담당할 수 있도록 하였다.
앱솔루트 엔코더의 통신 방식은 BiSS-C 방식이고 클럭이 엔코더로 입력되면 엔코더는 회전각에 대한 절대 값을 출력한다. 하지만, MCU에서는 직접적으로 BiSS-C 통신 방식을 지원하지 않는다. 그래서 MCU의 SPI 통신을 통해서 클럭을 출력하고 데이터를 입력 받는 방법을 사용한다. 추가로 BiSS-C 방식은 클럭과 데이터 신호는 차동 신호(Differential Signal)로 이루어져 있기 때문에 MCU의 SPI 통신 신호를 차동 신호로 변환하기 위해서 RS-422 Transceiver IC칩을 이용하였다.
상위 제어기와의 통신은 CAN 통신 방식을 채택하였고 MCU에서 CAN 통신을 구현하기 위해서 CAN Transceiver IC칩을 이용하였다.
3.2 BLDC 모터 컨트롤러 시제품 제작
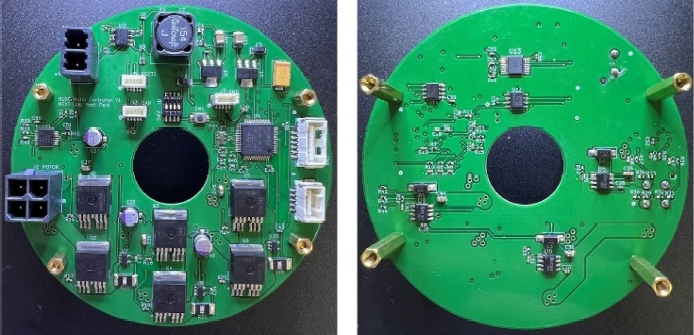
BLDC 모터 컨트롤러는 액츄에이터 후면에 장착하여 액츄에이터와 일체형으로 제작할 계획이다.
Fig. 6과 같이 액츄에이터의 중공축 설계를 반영하여 제작된 모터 컨트롤러 보드의 형상은 도넛 모양으로 중심이 뚫려 있다. 그러나 현재의 시제품 버전은 크기가 액츄에이터 보다 크고 전원 선, 모터 3상 선, 홀센서 및 엔코더 선들의 연결 편의성을 위해서 커넥터로 체결되도록 제작하였다. 왜냐하면 1차 버전의 시제품으로 충분한 회로 검증과 모터 테스트를 완료한 후에 2차 버전부터 크기를 줄여서 액츄에이터와 일체형이 가능한 모터 컨트롤러 보드를 제작하는 것이 새롭게 만들어지는 보드에서 예상할 수 없는 에러를 줄일 수 있는 방법이기 때문이다.
BLDC 모터 컨트롤러에 모터의 위치제어를 위한 PID 제어 루프를 구현하였다. 위치제어 루프는 1 kHz의 제어 주기로 동작한다.
4. 실험 결과
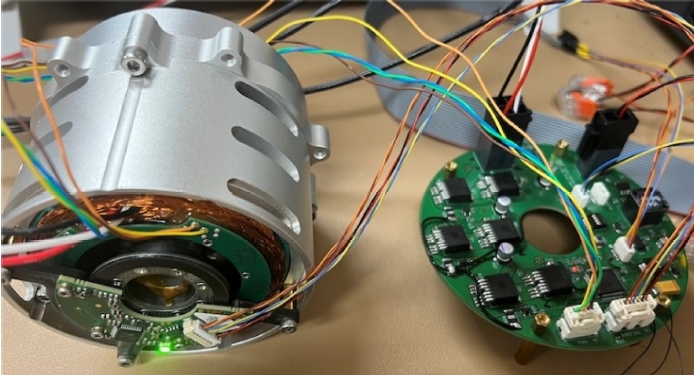
제작한 액츄에이터와 BLDC 모터 컨트롤러를
Fig. 7과 같이 연결하고, 추가로 모터 컨트롤러는 CAN통신으로 PC와 연결하였다. PC에서 Step 명령을 보내고 엔코더 값을 계속 읽으면서 Step 응답을 기록하였다.
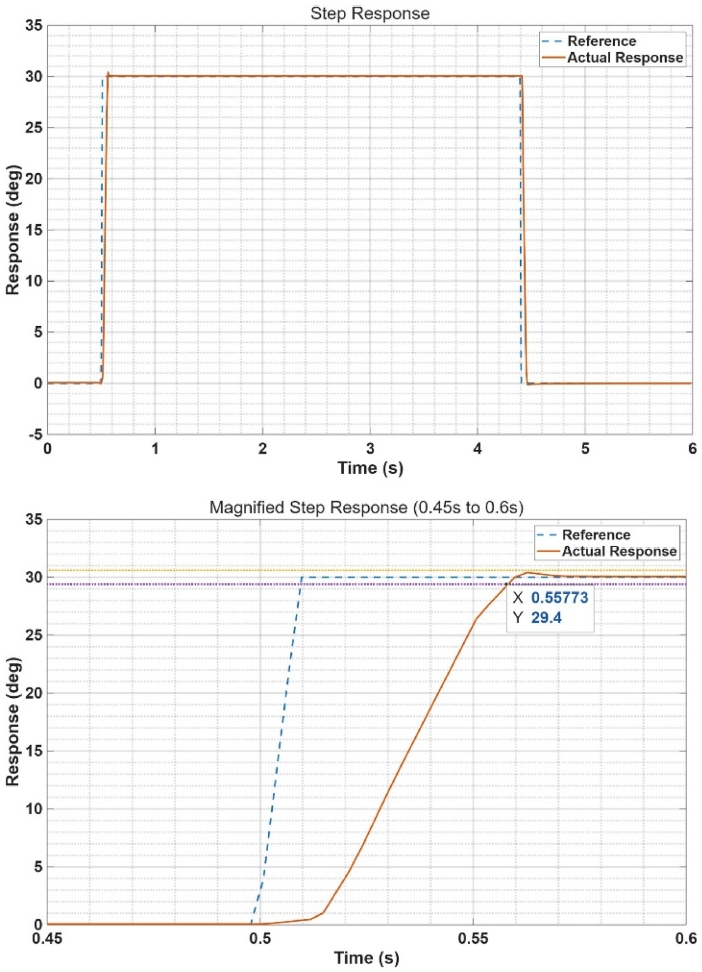
첫 번째 Step 명령으로 엑츄에이터의 출력 각도를 30°로 하였다. 그러면 실제 모터 입력 축은 355.005° 만큼 회전하여야 한다. 두 번째 Step 명령은 액츄에이터의 회전 각도를 처음 위치로 돌아오도록 0°를 입력하였다. 그 실험 결과에 대한 그래프를
Fig. 8에 나타내었다. 그래프의 점선은 Step 명령(Reference)을 각도로, 실선은 실제 모터의 응답을 각도로 표현한 것이다. 위쪽 그래프는 0에서 6초 동안 30° 그리고 0°로 변화하는 Step 명령에 대한 모터의 응답을 나타내었다. 모터는 Step 명령을 잘 추종하는 것을 볼 수 있다. 아래쪽 그래프는 위쪽 그래프의 0.45에서 0.6초 사이의 그래프를 확대하여 30° 명령에 대한 실제 추종 그래프의 모습을 자세히 보여준다. Step 명령은 0.51초에 30°에 도달하고, 그 이후에 모터가 응답하는 것을 볼 수 있다. 명령 값의 ±2% 이내 (29.4°-30.6°)로 들어오는 시간인 Settling Time은 0.55773초로 측정이 되었다. 따라서 모터는 0.04773만에 정상상태에 도달하였다.
5. 논의
액츄에이터의 중공축인 선 기어 샤프트의 내경의 지름은 5 mm로 여러 전선들이 통과하기에는 넓지 못하다. 예를 들어 BLDC 모터의 리드 선의 직경은 18 AWG로 피복까지 고려하면 1.7 mm이다. 만약 3개의 리드선이 통과하게 된다면 중공축 내부의 여유 공간이 부족하게 된다. 따라서 개선된 액츄에이터를 제작시에는 이런 단점을 보완할 것이다. 추가로 홀 센서가 없는 BLDC 모터의 구동을 위하여 BLDC 모터 컨트롤러에 센서리스 제어가 가능하도록 회로를 추가하고 펌웨어 코드를 업데이트 할 계획이다.
6. 결론
본 연구에서는 Frameless BLDC 모터와 Stepped 유성기어 감속기를 통합한 회전 관절용 액츄에이터를 설계 및 제작하고, 이를 제어하기 위한 BLDC 모터 컨트롤러를 개발하였다. 액츄에이터는 Kollmorgen TBM-7631-A 모터와 11.8335 : 1의 감속비를 갖는 2단 유성기어 시스템을 기반으로 하였으며, 고해상도 BiSS-C 절대 엔코더를 탑재하여 정밀한 위치 제어가 가능하도록 설계되었다. 제작된 시제품을 이용한 스텝 응답 실험 결과, 모터는 30° 명령에 대해 0.04773초만에 정상상태에 도달하는 것을 확인하였다.
향후 연구에서는 중공축 내경 확대를 통한 배선 편의성 개선, 센서리스 제어(Sensorless Control) 기능을 추가한 컨트롤러 설계, 그리고 액츄에이터-컨트롤러 일체형 소형화 설계 등을 진행할 예정이다. 본 연구의 결과물은 족형 로봇(Legged Robot) 및 다양한 로봇 관절 구동 시스템에 효과적으로 적용될 수 있을 것으로 기대된다.
FOOTNOTES
-
ACKNOWLEDGEMENT
본 과제(결과물)는 2 02 5년도 교육부 및 충청북도의 재원으로 충북RISE센터의 지원을 받아 수행된 지역혁신중심 대학지원체계(RISE) 글로컬대학30의 결과입니다(No. 2025-RISE-11-004).
Fig. 1A designed actuator integrating a frameless BLDC motor and a stepped planetary gear
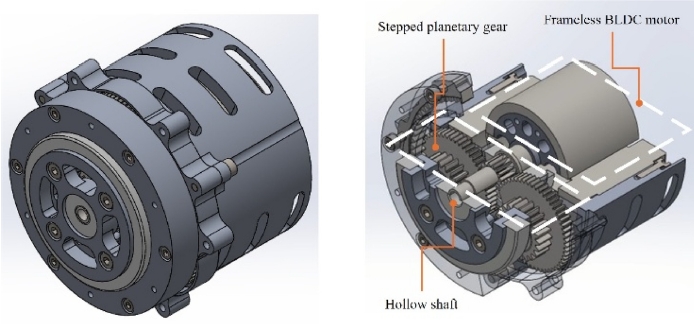
Fig. 2A section view of the rotor assembly which is made up of a rotor of a BLDC motor, a sun gear shaft, a shaft hub and a shaft hub insert
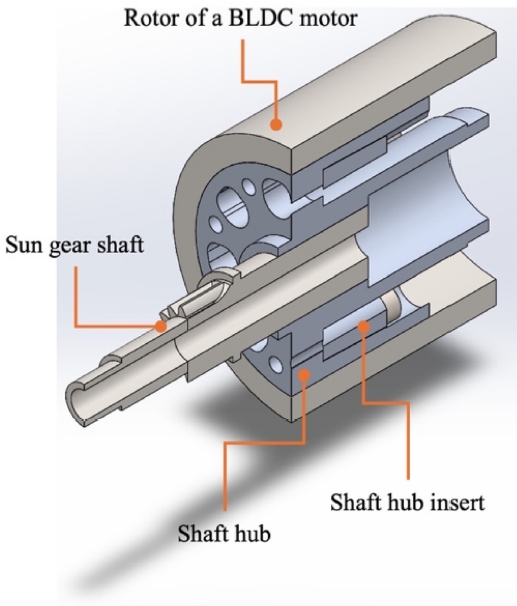
Fig. 3A disassembly of a stepped planetary gear module. The input is a sun gear shaft, and the output is an output ring connected to a ring gear
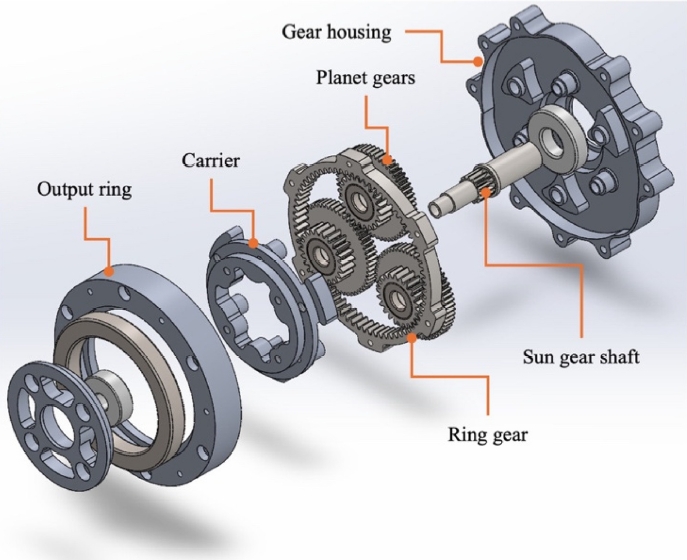
Fig. 4The front and back view of the developed actuator. An absolute encoder is installed on the back side
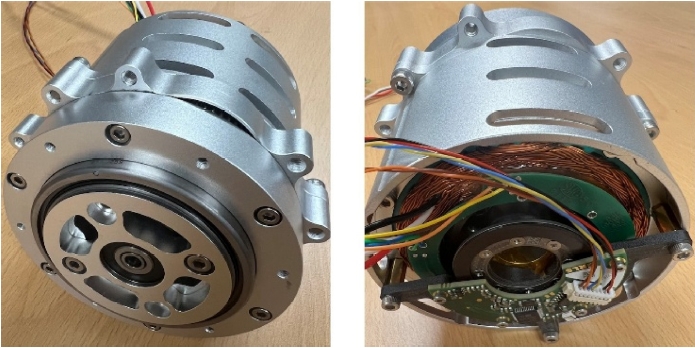
Fig. 5A circuit diagram of a BLDC motor controller. It shows a power part, a MOSFET & H-bridge part, and a communication part
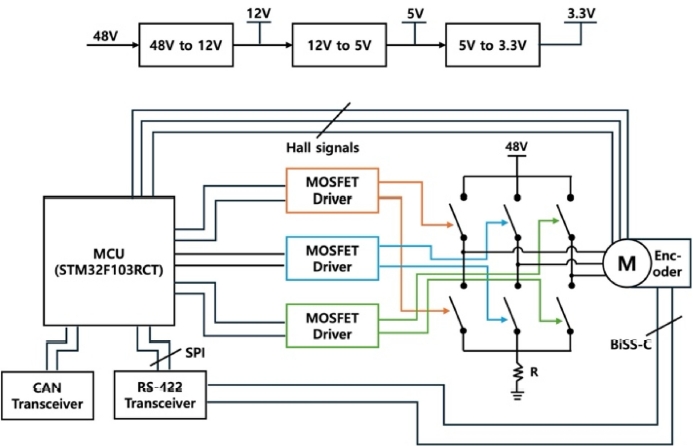
Fig. 6A top and bottom view of a prototype of a BLDC motor controller
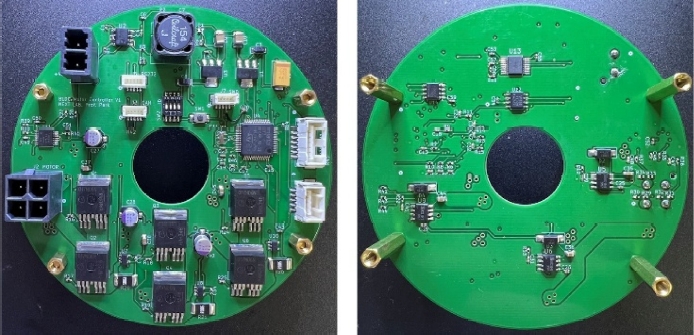
Fig. 7An experiment of the actuator integrated with the developed BLDC motor controller
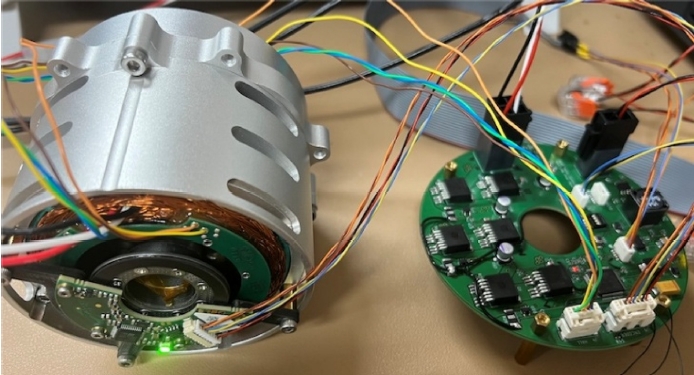
Fig. 8A step response with respect to references of 30° and 0° is presented at the top. A magnified step response from 0.45 to 0.6 s is shown at the bottom for more details
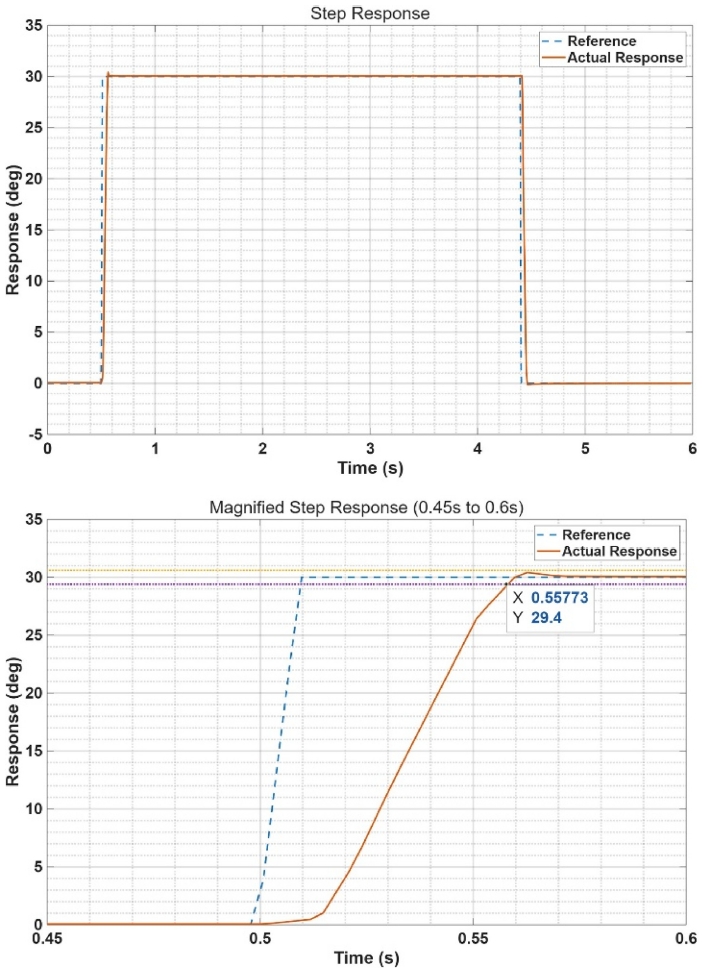
Table 1.The number of teeth in the stepped planetary gear system and gear ratio
Table 1.
|
Gear |
Number of teeth |
|
Sun gear |
15 |
|
Plant gear |
1st |
55 |
|
2nd |
22 |
|
Ring gear |
71 |
|
Sun-Ring gear |
11.8335 : 1 |
Table 2.Specification of the actuator
Table 2.
|
Frameless BLDC motor |
Model |
Kollmorgen TBM-7631-A |
|
Power |
307 W |
|
Rated voltage |
48 V |
|
Rated torque |
1.65 Nm |
|
Rated current |
10.9 A |
|
Mass |
0.738 kg |
|
Absolute encoder |
Model |
Renishaw |
|
Readhead |
MB039DCC19MENT00 |
|
Magnetic ring |
MRA039BC020DSE00 |
|
Resolution |
19 bit |
|
Multi-turn |
16 bit |
|
Communication |
BiSS-C |
|
Reduction ratio |
11.8335 : 1 |
|
Total mass |
1.514 kg |
REFERENCES
- 1. Yeom, H., Ba, D. X., Bae, J., (2018), Design principles and validation of a human-sized quadruped robot leg for high energy efficiency, The Journal of Korea Robotics Society, 13(2), 86-91.
- 2. Seo, W., Kwon, J., Ko, Y., Hong, D., (2019), An assistive control strategy using arm swing information for 1dof hip exoskeleton for hemiplegic gait rehabilitation, Journal of the Korean Society for Precision Engineering, 36(4), 419-424.
- 3. Lee, J. H., Hong, J. K., Woo, S. H., Lee, S. G., (2024), Development of a compound planetary gearbox for robot and performance evaluation using dynamometer, Journal of the Korean Society for Precision Engineering, 41(3), 163-168.
- 4. Park, H., Sim, Y., Kwon, O. Yi, H., Lee, (2021), Design of compound planetary gear reducer for mobile robot actuator, Journal of the Korean Society of Mechanical Technology, 23(2), 254-259.
- 5. Elery, T., Rezazadeh, S., Nesler, C., Doan, J., Zhu, H., Gregg, R., (2018), Design and benchtop validation of a powered knee-ankle prosthesis with high-torque, low-impedance actuators, Proceedings of the IEEE International Conference on Robotics and Automation, 2788-2795.
- 6. Nandor, M., Heebner, M., Quinn, R., Triolo, R. Makowski, (2021), Transmission comparison for cooperative robotic applications, Actuators, 10(9), 1-15.
- 7. Park, S., (2025), Development of a Stepped Planetary Gear Actuator with an Integrated Hollow Shaft for Quadruped Robots. Proceedings of the KSPE 2025 Spring Conference. 189.
- 8. Park, S., (2021), The probe: Design and development of a large hexapod robot, IEEE Access, 9, 125628-125639.
Biography
- Sangsin Park
Assistant Professor in the Department of Mechanical Engineering, Korea National University of Transportation. His research interests are legged robots, robot design, and control.