ABSTRACT
As modern warfare shifts towards electronic warfare and Intelligence, Surveillance, and Reconnaissance (ISR), there is an increasing demand for stabilized gimbal systems mounted on tracked vehicles to operate reliably in harsh combat environments. However, high-frequency disturbances generated by the vehicle can degrade the quality of the imagery produced by these systems. To mitigate image blur caused by vibration, elastomeric isolators are used; yet, their nonlinear behavior under shock and vibration makes performance prediction challenging. This study aims to model the nonlinear dynamics of these isolators and identify the optimal configuration. Numerical simulations were conducted to pinpoint leading candidate isolators, which were then tested through operational vibration and shock assessments on four isolators with varying stiffness. The selected isolator achieved vibration attenuation of 83% on the X-axis and 72% on the Y-axis. It also met a safety margin of 1.54 for the image sensor and demonstrated durability through endurance testing.
-
KEYWORDS: Elastomeric isolator, Dynamic characteristics, Vibration isolation, Gimbal system
-
KEYWORDS: 엘라스토머 방진구, 동특성, 진동절연, 짐벌
NOMENCLATURE
Deflection due to Vibration
Acceleration due to Gravity
Vibration Acceleration Output
Shock Response Acceleration
Shock Corrected Spring Rate
Shock Input Pulse Duration
Resonant Transmissibility
Root Mean Square Acceleration in g Units
1. 서론
현대 전장에서의 정밀 타격 및 신속 대응 능력은 군사 플랫폼의 생존성과 전투 효율성을 결정짓는 핵심 요소로 작용한다. 특히 전자전 및 감시/정찰 중심으로 작전이 고도화됨에 따라, 다양한 전투 환경에서 안정적으로 운용 가능한 안정화 짐벌 시스템의 수요가 급증하고 있다. 이러한 요구에 부응하여 안정화 짐벌 시스템은 표적 탐지, 추적, 식별, 조준 등의 기능을 실시간으로 수행할 수 있는 핵심 임무 장비로 자리 잡고 있으며[
1], 해당 시스템의 성능은 곧 플랫폼의 작전 성공 여부를 좌우하는 중대한 변수로 작용한다.
안정화 짐벌 시스템은 카메라 모듈과 안정화 구동 장치로 크게 구분되며, 카메라 모듈은 직접적으로 영상을 확보하는 전자광학(Electro-optical, EO) 카메라, 적외선(Infra-red, IR) 카메라, 레이저거리측정기(Laser Range Finder, LRF) 와 이를 제어하는 전자보드 등으로 구성된다[
2]. 안정화 구동 장치는 카메라 모듈을 지지하고 카메라의 시선 지향(Line of Sight, LOS) 기능을 구현하는 부분으로서 베어링, 모터, 위치센서, 및 방진구 등을 포함하여 짐벌 메인 프레임에 조립되는 구조를 갖는다.
Fig. 1은 안정화 짐벌 시스템의 형상과 해당 시스템을 모사한 시험용 모델을 나타냈다. 시험용 모델은 총 8개의 방진구가 양단을 지지하는 구조를 갖는데, 짐벌 내부의 카메라 모듈을 효율적으로 지지하고 각 방진구가 갖는 모멘트 하중을 최소화하는 구조를 갖는다.
안정화 짐벌 시스템의 성능은 영상 장비의 성능이 우수해야만 좋은 품질의 영상을 획득할 수 있다. 하지만 분해능이 높은 영상을 촬영하는 장비가 있다고 해도 영상 획득시 외란의 영향을 받게 되면 영상 품질은 저하된다. 이러한 외란은 짐벌 시스템이 장착된 플랫폼의 운용시 유입되게 되는데, 이때 유입된 진동은 짐벌 시스템의 시선의 흔들림을 유발하고 시선 흔들림은 영상을 번지게 하여 분해능을 열화시킨다. 영상의 흔들림 중에서 영상 품질에 미치는 영향이 큰 성분은 높은 주파수 대역의 진동인데, 주파수가 높을수록 동일 시간 더 많은 횟수의 흔들림이 발생하여 영상 번짐이 깊어지기 때문이다. 이러한 유입 외란을 감쇠시키기 위해 짐벌 시스템은 방진구를 포함한 방진 설계가 이루어져야 한다[
3]. 방진 설계는 크게 스프링 방진, 탄성체 방진, 능동/준능동 방진 설계 등 다양한 방식이 있지만, 본 연구에서는 소형화 설계에 적합하고 경량성을 확보할 수 있으며 고주파수 영역에서 우수한 방진 성능을 발휘하는 탄성체 방진 설계를 적용하고자 한다. 탄성체 방진 설계는 탄성이 현저한 고분자 물질에 해당하는 엘라스토머 재질의 방진구를 사용한다. 엘라스토머 방진구는 장치로 유입되는 높은 주파수 대역의 진동을 감쇠시켜 열에너지로 변환한다. 이는 영상 품질을 저해시키는 진동를 차단하는 데 효과적으로 작동한다.
이러한 장점이 있지만 엘라스토머 방진구의 동특성은 가진 조건에 따라 변하는 비선형 특징으로 진동 및 충격이 적용된 조건에서의 성능을 예측하는데 어려움이 따른다. 외란에 의한 진동 및 충격은 짐벌 시스템에 영향을 미쳐 영상 성능 및 기능 저하, 장치의 파손을 유발할 수 있는 만큼 설계 단계에서 그 특성을 분석하는 것은 매우 중요하다. 관련하여 짐벌 시스템의 시험 및 해석 기법에 관한 연구로 Kim 등[
4-
7], 짐벌 시스템의 제어 관련 연구로 Cho 등[
8-
10]에 의해 이루어졌으나 본 논문과 같이 방진구의 강성에 따른 방진 성능을 실 운용 진동을 기반으로 하여 복합적으로 분석하고 연구한 사례는 미미하다.
본 논문은 비선형 특성을 갖는 엘라스토머 방진구의 성능을 초기 수치분석을 기반으로 예측하고 선별된 방진구간 성능을 시험을 통해 분석함으로써 최적의 방진구를 선정하고자 한다. 제품사양서에 제시된 공칭값은 특정한 조건에서 만족하는 값이기 때문에 일반적인 환경에서는 동일한 결과를 얻을 수 없어 성능 예측에 불확실성을 키우게 된다. 본 연구의 방진구 사양은 운용 레벨과 유사한 진동시험을 기반으로 방진구의 강성을 산출하여 수치분석의 정확성을 높이고자 하였다. 연구는 방진구를 수치분석을 통해 성능을 예측하여 시험군을 선정하고 선정된 방진구를 시험용 모델에 장착하여 운용성능 진동시험과 충격시험 기반으로 강성에 따른 영향을 분석하고 내구성과 안정성을 검증하였다.
2. 본론
2.1 방진구 선정
엘라스토머 방진구는 금속으로 된 딱딱한 체결부와 무르고 탄력있는 엘라스토머로 구성된다. 물리적으로 점탄성(Viscoelastic) 특성을 지니는데, 천연고무(Natural Rubber), 합성고무(Synthetic Rubber), 고분자화합물(Polymer) 등이 여기에 포함된다.
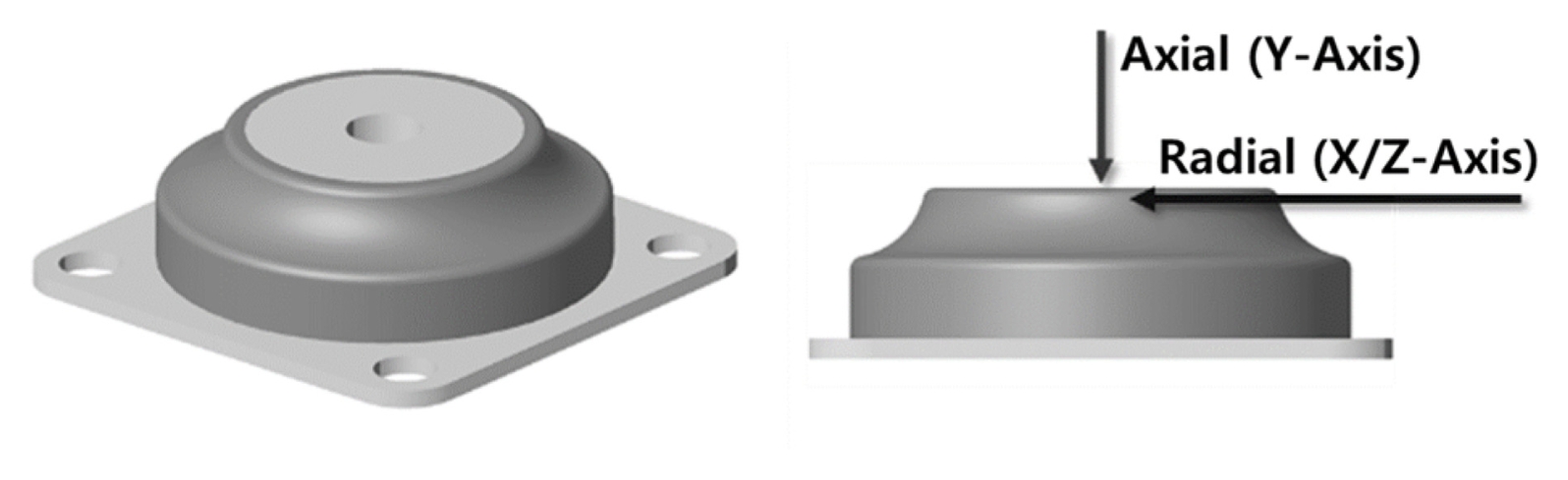
Fig. 2는 엘라스토머 방진구의 형상 및 시험 및 분석간 데이터의 기준 축이다.
안정화 짐벌 시스템에 적용하기 위한 방진구 선정은 제작사인 미국의 LORD사에서 제공하는 선정 방식을 통해 검토했다[
11]. 제품사양서에서 제시된 공칭값은 특정한 조건(0.91 mm의 최대 동적 입력에 의한 결과)으로 실제 적용조건과는 차이가 있다.
본 연구에서는 방진구 선정간 수치분석을 통한 성능 예측의 신뢰성 확보를 목적으로 5-500 Hz 대역에서 0.002 G
2/Hz의 랜덤 진동 시험을 통해 방진구의 강성을 도출하였다. 실험을 통해 도출한 방진구의 동적 스프링 강성은
Table 1에 정리하였다.
방진구의 기계적 성질은 강성과 지지 질량에 의해 결정되며 시스템의 고유진동수는 이러한 요소들의 함수로 정의된다. 방진구의 선정간 엘라스토머의 비선형 특성상 수치분석만으로 정확한 성능 특성을 검증함에 한계가 있는 만큼, 이러한 함수를 기반으로 예측 가능한 방진구의 고유진동수와 거동 변위를 계산하고 1차적인 시험용 방진구 선정을 목적으로 절차를 진행하였다.
방진 시스템의 고유진동수(
fn)와 엘라스토머 방진구의 강성(
k)은
식(1)과
식(2)로 정의된다. 여기서,
g는 중력가속도,
w는 방진구의 지지 중량을 나타낸다.
시스템이 노출되는 랜덤 진동 환경에서는 입력이 확률적으로 변동하므로 최대 응답을 예측하기는 어렵다. 특히 엘라스토머 방진 요소는 실제 운용 중 약 3σ 수준에서 공진 응답이 뚜렷하게 나타나는 것으로 알려져 있으며, 이는 장비가 경험할 수 있는 대부분의 피크 응답을 포함하는 보수적 설계 기준에 해당한다[
12]. 따라서, 보수적 설계 기준에서 시스템의 입력 가속도는
식(3)과 같이 계산된다.
식(3)의
go는 3σ 수준의 시스템 입력 가속도로 랜덤진동레벨(
si)과 고유진동수(
fn), 공진전달률(
Tr)의 상관식으로 정리된다.
이때, 고유진동수에서 시스템이 갖는 전체 진동 변위(
xo)는
식(4)와 같고 한 방향 기준 진폭 변위(
dv)는
식(5)와 같이 나타낼 수 있다.
한편, 방진구에 정적으로 작용하는 하중에 의한 처짐(
dst)은
식(6)과 같이 나타낼 수 있다. 진동 및 정적 하중에 의한 총 변위(
dt)는
식(7)로 표현이 가능하다.
이러한 응답 특성 분석은 방진구 설계 및 선정간 기초 데이터로 활용되며, 방진구의 정적 변위를 예측하고 허용된 공간 내에서 설계가 가능한지 평가하는 기준이 된다.
엘라스토머는 충격에 따라 강성의 수치가 약 1.2-1.6배 증폭되는 특성을 갖는 데, 본 논문에서는 제조사에서 제안하는 대표적인 비율 1.4배의 보정 계수를 적용하여 충격 강성(
ks)을
식(8)과 같이 정의하였다. 충격 고유진동수(
fs)는
식(9)와 같이 표현이 가능하다.
충격 응답에 대한 전달률(
Ts)은 시험 조건에 해당하는 톱날파형 충격을 고려하여 충격 진동수(
fs)와 충격 펄스 지속시간(
τ)을 이용하여
식(10)과 같이 근사적으로 정리하였다.
충격 입력에 대한 시스템 전달 에너지(
Go)는
식(11)로 충격전달률과 입력된 충격량(
Gi)의 곱으로 산정이 가능하며, 최종적으로 충격에 의한 변위(
dsh)는
식(12)와 같이 표현이 가능하다. 수치분석을 통해 선정한 방진구의 예상 특성은
Table 2에 정리하였다.
시험용 방진구의 선정은 고유진동수와 변위를 기준으로 하였다. 고유진동수 측면에서 방진구의 선정은 방진구를 제외한 시험용 모델이 갖는 공진주파수(190.2 Hz)에 √2배 나눈 134.4 Hz 이하 성능을 가져야하다[
13]. 이는 방진구와 시험용모델의 모드 커플링(Mode Coupling)현상을 방지하고 안정적인 시스템을 설계하기 위한 기준으로 활용된다. 변위를 고려한 방진구의 선정은 제조사의 방진구 최대 허용 변형량(±3.5 mm)이하의 모델 선정을 목표로 하며, 과도 변형에 의한 방진구 파손과 제품 설계간 허용 공간내 충돌 발생 여부를 평가하는 기준으로 활용된다. 이러한 기준으로 실험용 방진구를 선정한 결과, 0번과 1번 방진구는 변위에 의한 파손이, 4번 방진구는 제품 적용시 공진에 의한 파손이 예상되었다. 시험용 방진구는 이러한 절차를 기반으로 2, 3번이 적합한 방진구로 판단하였으며, 수치분석간 설계 허용치 이상이 예상되는 1, 4번 방진구는 방진구 강성에 따른 영향 분석을 목적으로 추가하여 진행하였다.
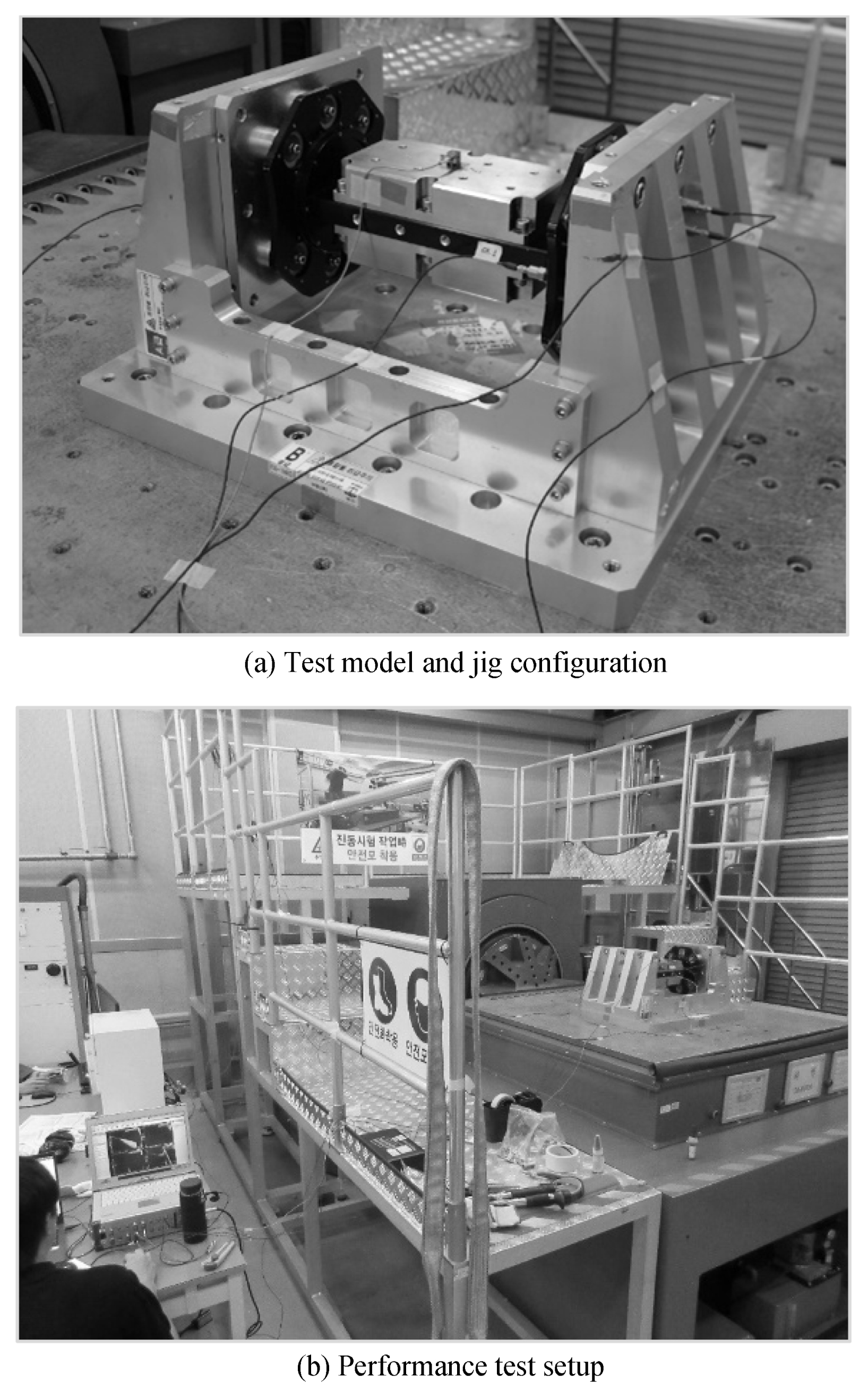
본 시험에서는 방진구의 방진 특성을 분석하기 위해 실 운용 조건과 유사한 환경을 재현할 수 있도록 실제 장비와 동일한 중량과 무게중심을 갖는 시험용 모델을 제작하였다. 시험 구성은 고정 장치 하단에 입력 외란 측정용 가속도 센서(Accelerometer)를 부착하고 방진구가 적용된 시험용 모델의 응답 특성 측정용 가속도 센서를 카메라 모듈 위치 더미에 부착하여 입력과 출력 데이터를 확보할 수 있도록 구성하였다. 방진구의 성능 평가를 위한 시험용 모델과 고정 장치 형상은
Figs. 3(a)에 나타냈으며, 시험 구성은
3(b)와 같이 구성하였다.
방진구의 방진 성능 분석은 운용성능 진동시험과 충격시험, 내구성진동시험으로 구성하였으며, 방진구 기준 Radial 방향을 X축으로, Axial 방향을 Y축으로 외란을 인가하였다. 시험 순서는 2종의 동특성 시험(운용성능 진동시험, 충격시험)을 통해 강성에 따른 특성 분석을 수행하여 최적의 성능을 갖는 방진구 선정하고 해당 방진구에 내구성진동시험을 수행하여 방진구의 내구성과 안정성을 검증하는 순서로 진행하였다.
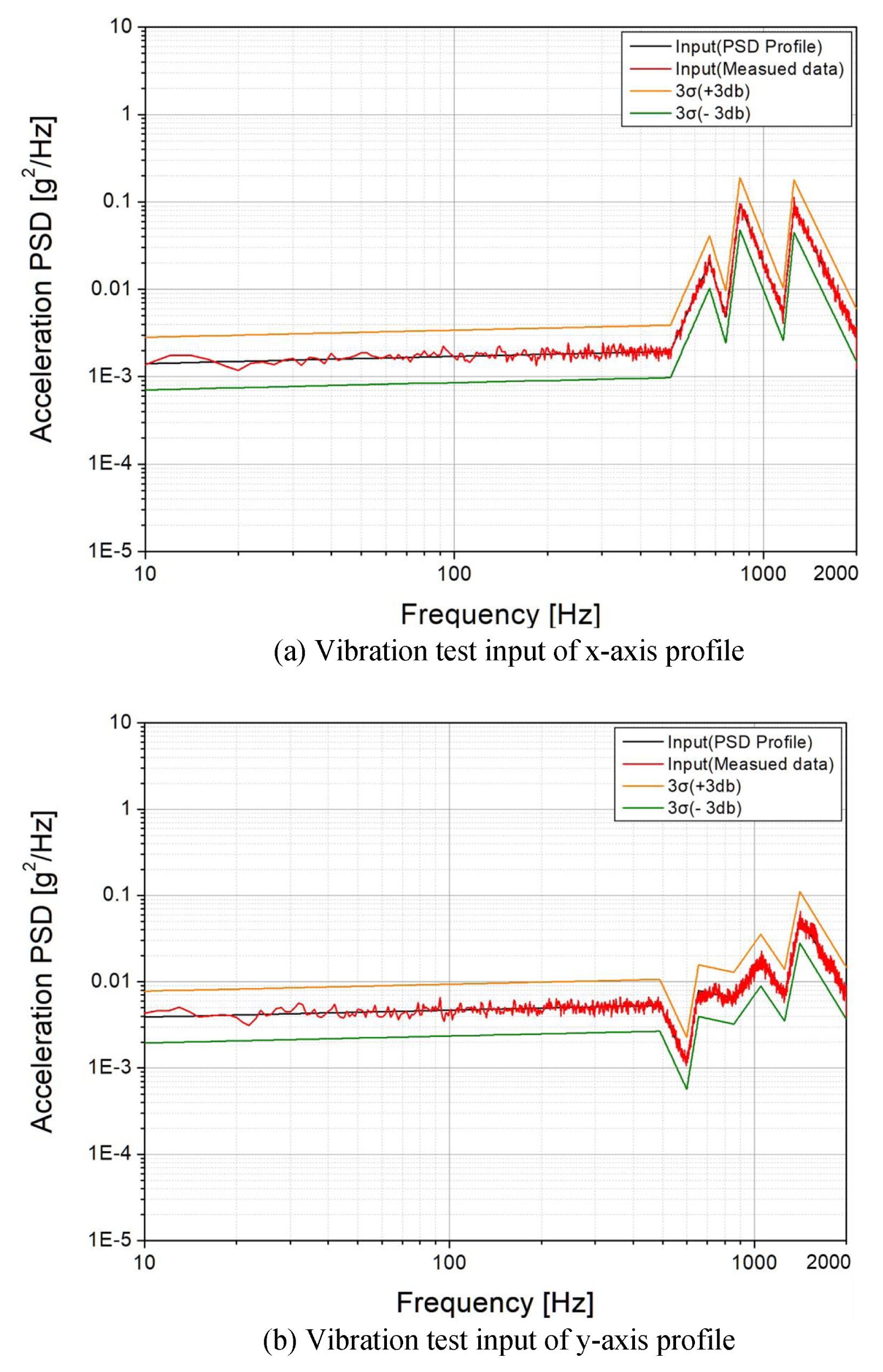
방진 성능 분석을 위해 수행한 운용성능 진동시험은 장치가 장착된 지상 플랫폼이 목표물을 향해 24발의 발포 사격시 장치로 유입되는 실측 데이터를 기반으로 입력 외란 데이터를 정의하였다. 운용성능 진동시험에서의 외란은 시간-가속도(Time-acceleration) 데이터로 획득 후 가진 장치가 구현 가능하도록 주파수 영역에서의 진동 에너지 분포로 PSD (Power Spectral Density) 프로파일로 변환 산출하였다. 변환 절차는 시간 영역에서의 가속도 신호를 FFT (Fast Fourier Transform)을 수행하여 개별 파워 스펙트럼을 산출하고, 이를 평균하여 전체 PSD를 도출하는 방식으로 진행하였다. 이렇게 정의된 PSD를 기반으로 가속도의 RMS (Root Mean Square) 값을 계산하여 시험장비의 입력으로 인가하였다. 시험 입력은 미국 국방 표준 규격(MIL-STD-810G)에 따라 장비의 허용 오차 범위를 ±3 db 이내로 유지하도록 제어하였다[
14]. 이를 통해 실제 환경에서 발생 가능한 변동성을 반영하면서도 규격을 만족하는 시험 조건을 확보하였다. 장치에 인가된 운용성능 진동 시험 입력 프로파일은
Figs. 4와 같으며,
4(a)는 X축 방향,
4(b)는 Y축 방향 입력 데이터를 나타내었다. 각 축의 입력 에너지크기는 10-2,000 Hz 주파수 구간에서 X축 프로파일은 5.08 Grms, Y축 프로파일은 3.81 Grms의 값을 갖는다.
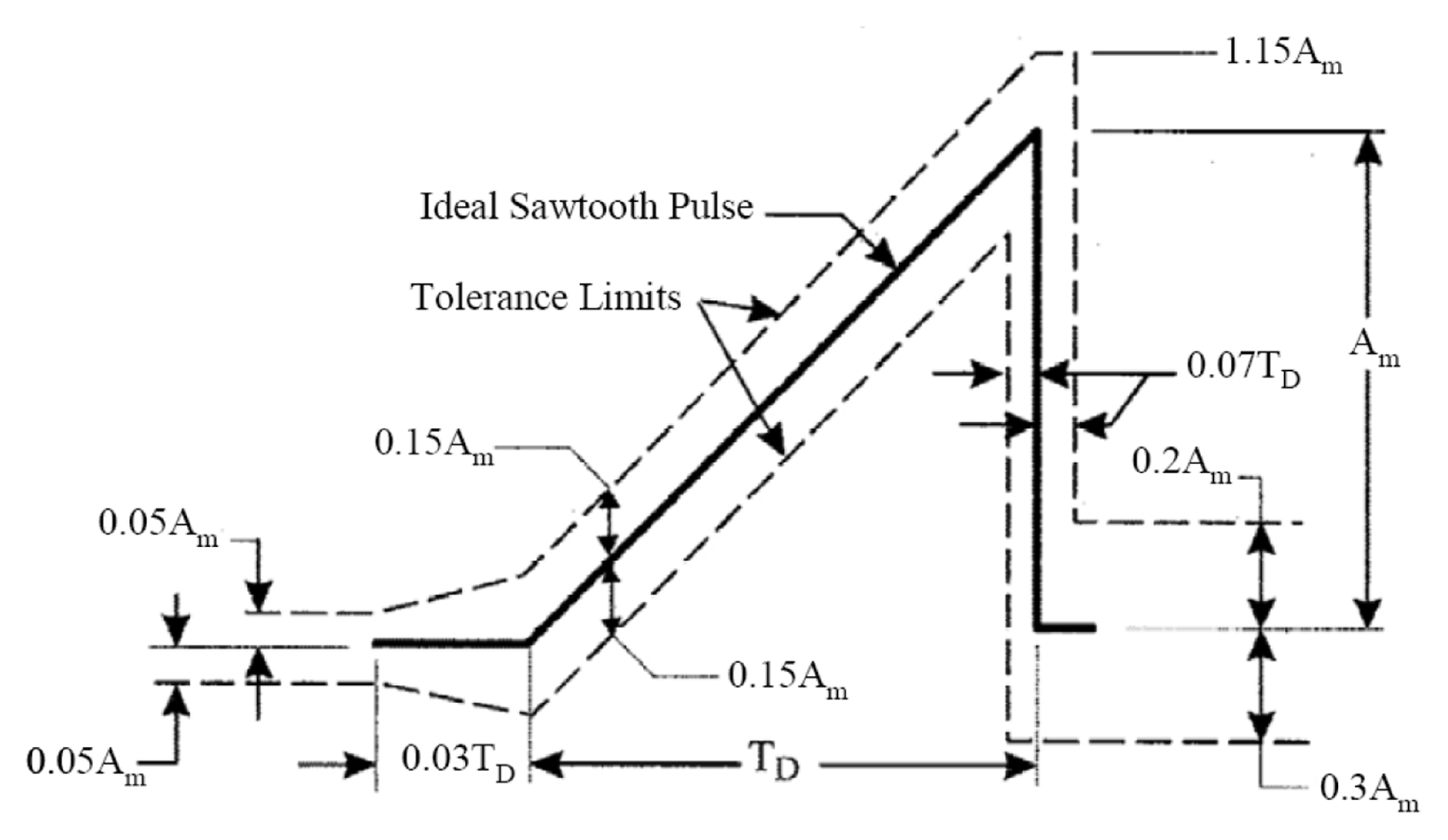
충격시험은 미국 국방 표준 규격(MIL-STD-810G) 절차를 기반으로
Fig. 5와 같이 수행되었으며[
14], 30±3 G의 충격을 충격 펄스 지속시간 11±1.1 ms의 톱니파형(Sawtooth Palse) 충격을 기준으로 인가하였다.
내구성시험은 앞서 진행한 운용성능 진동시험과 충격시험 결과를 바탕으로 최종 선정한 방진구의 내구성 분석을 위해 수행되었으며, 방진구의 내구성과 안정성을 확인하고자 수행되었다.
3. 시험 결과
3.1 운용성능 진동시험 결과
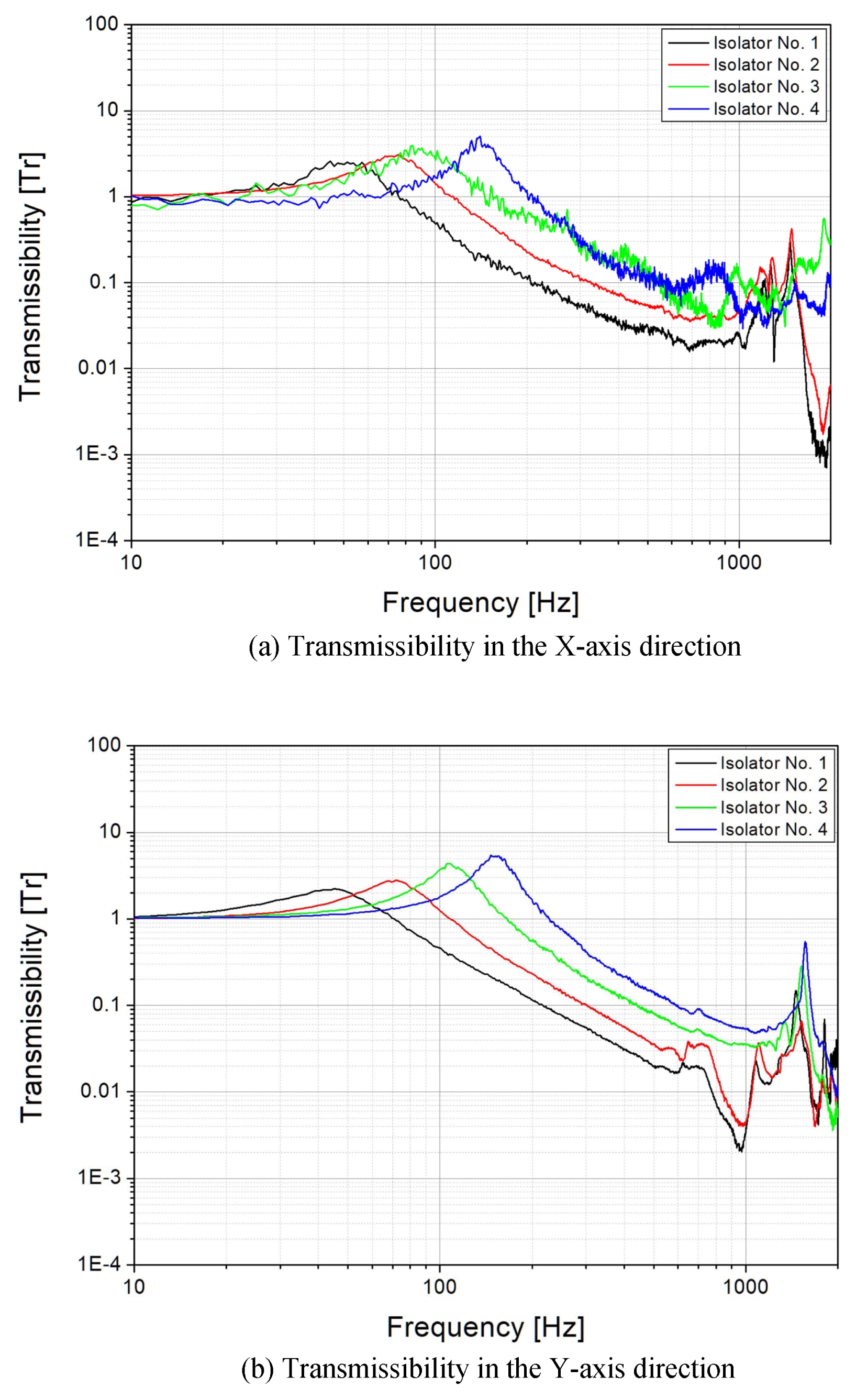
운용성능 진동시험은 짐벌 시스템의 안정화 성능 구현 환경을 모사하는 시험 조건에서 수행되었으며,
Fig. 6에 도시된 바와 같이 각 방진구의 전달률 응답을 로그스케일로 나타내어 비교하였다. 시험의 결과 분석은 인가된 입력 대비 진동 저감 성능 개선을 분석하였다.
Table 3는 해당 시험에서 확인한 방진구 별 특성을 나타낸 결과이다.
Table 3에서 나타낸 방진효율(IE)는
식(13)과 같은 형태로 가속도센서로 계측한 시험용 모델의 입력 외란 데이터(Test Input)와 응답 특성 데이터(Test Output)로 정의하였다.
시험 결과 방진구의 고유진동수는 수치분석으로 예측한 방진구 고유진동수(
Table 1)와 비교하면 평균 9% 수준이며, 일부에서 최대 29%까지 편차가 발생하였다. 이러한 차이는 엘라스토머 방진구가 주파수에 따라 변화하는 비선형 특성, 수치분석과 동특성 시험조건의 차가 영향에 기인한 것으로 판단된다. 하지만 평균 오차가 9% 수준인 점을 고려하면 랜덤 진동 시험 기반으로 도출한 방진구 강성을 이용한 수치분석은 고유진동수 예측 측면에서 경향성과 일정 수준의 신뢰성을 가진다 볼 수 있다. 운용성능 진동시험을 통해 확인한 방진구의 특성은 강성이 증가할수록 방진효율은 줄어들고, 고유진동수와 공진전달률이 커지는 것을 확인할 수 있다. 방진 효율은 방진구간 최대 X축 35%, Y축 25%의 방진 효율 차이를 보였다. 진동시험 측면에서 방진구의 설계는 강성을 낮춰 고유진동수를 줄여, 감쇠 영역을 키우고 방진 효율을 키우는 것이 실 운용간 안정화 기능 구현에 더 우수한 성능을 보일 것으로 판단된다.
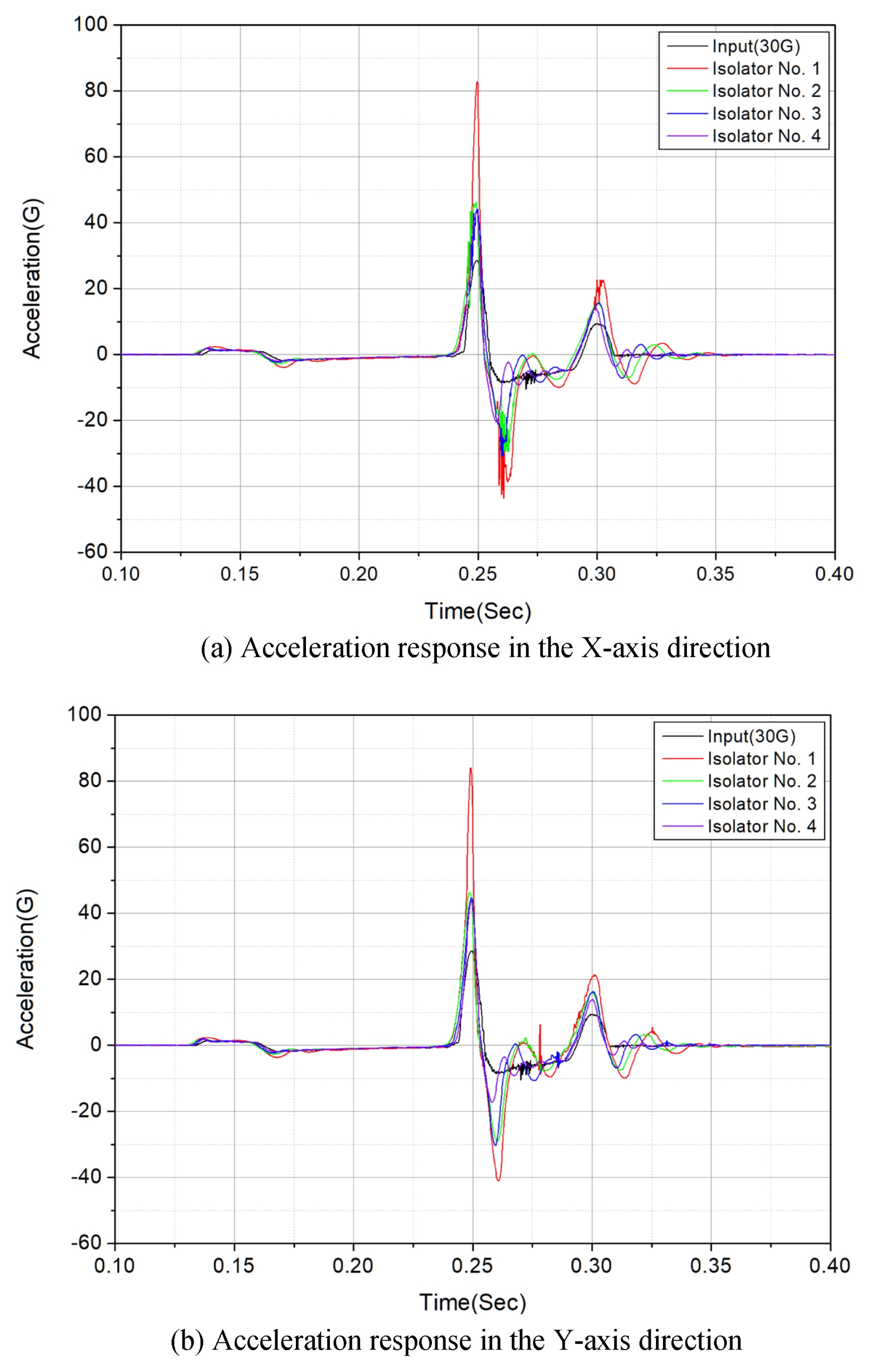
충격시험은 장비 운용시 실제로 발생할 수 있는 충격 환경에 대한 방진구 성능 확인을 목적으로 수행되었다. 성능의 분석은 충격 입력시 방진구를 거쳐 카메라 모듈로 전달되는 충격 거동 분석하였으며, 충격시험 결과는
Fig. 7에 도시된 바와 같은 거동을 보였고
Table 4의 표로 충격 응답에 대한 각 방진구별 최대 가속도 결과를 정리하였다.
충격시험 결과 1번 방진구를 제외한 2-4번 방진구가 X, Y축 응답이 47 G이하 수준으로 계측되었으며, 1번 방진구는 방진구 사양을 초과하는 시스템의 하중과 충격 입력으로 인해 과도한 증폭 값이 계측된 것을 확인할 수 있다. 이는 실제 제품에 적용 시 카메라 모듈의 파손 및 방진구의 파손이 발생할 수 있음을 나타낸다. 2-4번 방진구가 보인 47 G 이하 충격 거동은 충격에 대한 증폭 결과로 보일 수 있다. 내부 카메라 모듈들의 충격사양(80 G)을 고려할 때, 안전율 1.5 수준을 충족하는 것을 확인할 수 있다. 방진구의 강성에 따른 특성을 보면, 강성이 커질수록 충격전달률은 줄어드는 것을 확인할 수 있었으며, 그 크기의 수준이 방진구의 설계치 내에서 3 G 수준으로 유사한 특성을 보인다. 충격사양은 2, 3, 4번 방진구 모두 충족하는 것을 확인할 수 있었다.
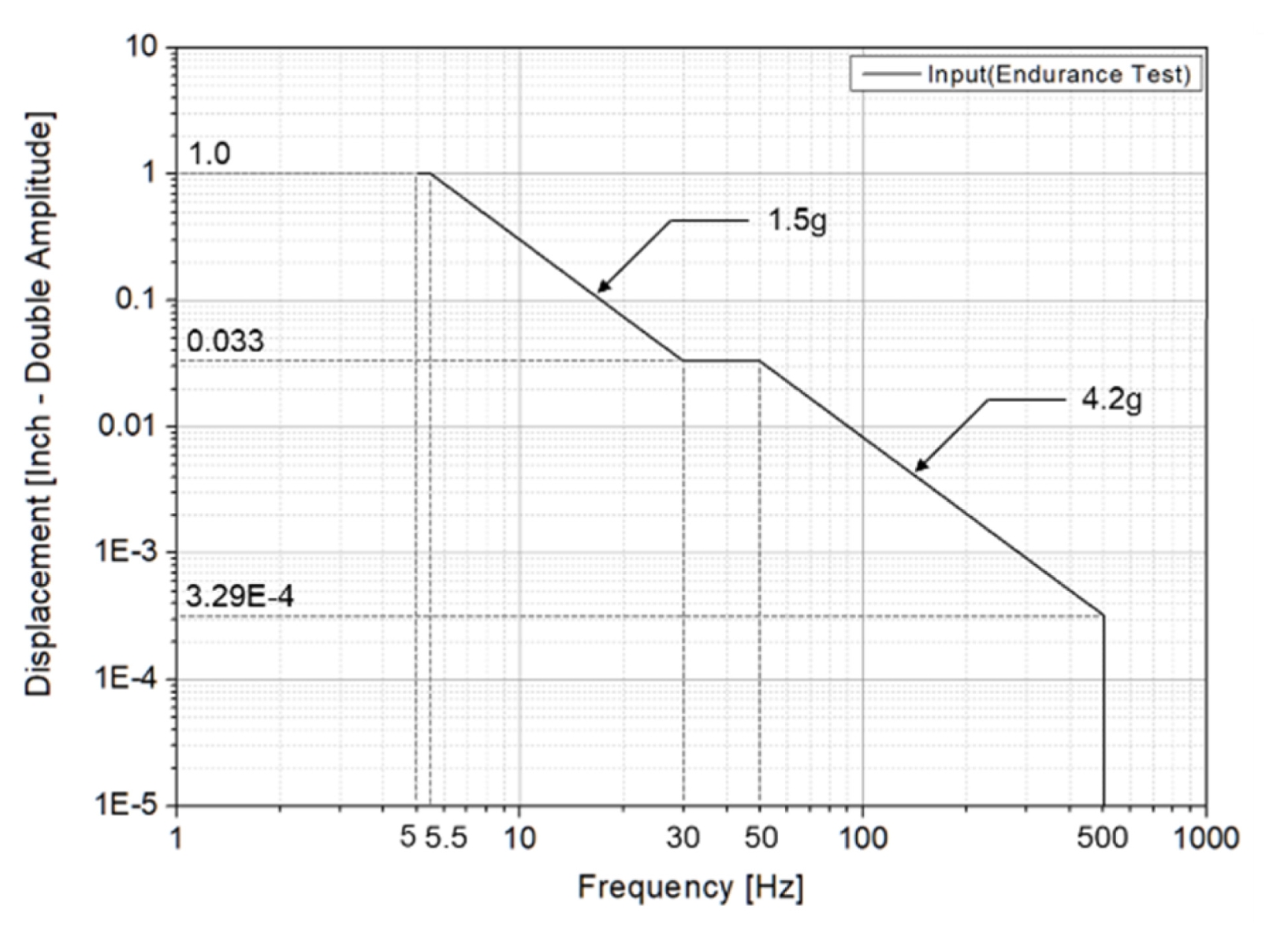
3.3 내구성진동시험 결과
내구성 진동시험은 해당 플랫폼의 평가 규격에 해당하는 미국 국방 표준 규격(MIL-STD-810C)의 지상플랫폼장비 중 궤도차량의 탑재장비 내구성시험 절차(Method 514.2, Figure 514.2-6)에 제시된 무한궤도 차량 운송 환경의 랜덤 진동 프로파일을 기준으로 수행되었다[
15]. 단, 공진점 범위(
fn±10 Hz)에서는 0.5 g 가속도로 테일러링(Tailoring)하여 진행하였다.
시험에 수행된 방진구는 사양 선정간 수치분석을 기반으로 설계 허용치 내 예측 결과와 운용성능 진동시험과 충격시험을 기반으로 선정한 2번 방진구를 최종모델로 선정하고 시험을 진행하였다. 내구성 시험은 장비의 구체적인 성능과는 별개 절차이지만 극한의 진동환경을 인가하여 방진구의 내구성과 안정성을 검증하는 절차이다. 시험 결과 2번 방진구는 내구성진동시험 후에도 성능저하 및 파손이 없는 것을 확인하였다. 해당 결과는 2번 방진구가 플랫폼에 적용될 경우 운용 과정에서 내구성과 안정성이 확보됨을 보여준다.
4. 결론
본 논문에서는 궤도차량 탑재 다축 안정화 짐벌의 방진 성능에 미치는 엘라스토머 방진구 강성의 영향을 분석하는 것을 목적으로 한다. 이를 위해 시험용 모델에 강성이 서로 다른 5종의 방진구를 적용하여 수치분석 기반의 특성 분석을 수행하였으며, 그 결과를 바탕으로 선정한 4종의 방진구에 대해 탑재 플랫폼의 운용 외란을 모사하는 진동 및 충격시험을 수행하여 강성에 따른 특성 분석을 실시하였다.
수치분석 결과, 정적/진동에 의한 변위가 가장 높은 0번 방진구가 0.8 mm 수준으로 그 차이가 적고 설계 간 안정적이었으나, 충격에 대한 변위는 강성이 낮을 경우 제조사의 사양(±3.5 mm)를 초과하는 0, 1번 방진구를 식별할 수 있었다. 방진구의 충격 변위는 기본적인 변위와 강성의 상관관계에 따른 결과임과 함께 방진구가 주파수에 의존한 감쇠 특성을 갖기 때문에 강성이 높은 등급일수록 충격 순간에 반발력이 더 빠르게 증가하고 높은 강성에 의한 높은 고유진동수가 에너지의 소산을 키워 충격 변위를 줄이는 것으로 보여진다.
수치분석 결과, 고유진동수는 시험용 모델이 갖는 고유진동수(190 Hz)에 영향을 주지 않는 방진구의 선별을 위해 진행되었으며, 0-3번 방진구가 최소 1.77배 이상의 주파수비를 확보하는 것으로 확인했다. 만약 시스템의 고유진동수에 영향을 주는 대역 내 설계가 이루어질 경우, 모드 커플링 현상을 보여 제어 불능의 거동을 가져가 기기의 결함, 파손을 야기할 수 있기 때문이다.
운용성능진동시험 결과, 방진구 강성은 낮을수록 진동에 대한 방진효율은 증가하고 충격에 대한 전달률은 커지는 것을 확인할 수 있었으며, 진동에 의한 방진 효율은 방진구간 성능차가 X축 35%, Y축 25%의 방진 효율 차이를 보였다.
충격시험 결과, 충격성능은 1번 방진구는 과도하게 높은 충격 전달특성을 확인하였는데 이는 강성 대비 과도하게 높은 충격이 인가되며 카메라 모듈들의 충격사양(80 G)를 초과하는 응답과 더불어 방진구의 파손으로 이어진 것으로 확인되었다. 충격성능에서 2, 3, 4번 방진구 모두 충족하는 것을 확인할 수 있었다.
방진구 분석 결과, 2번 방진구가 시스템 고유진동수 대비 주파수비가 2.5 이상으로 나타났으며, 운용 성능 진동에 대해 83%의 감쇠 효율을 보였다. 또한 30 G 충격 조건에서 1.54의 증폭비를 갖고 카메라 모듈의 충격 사양 대비 1.72 수준의 안전율을 확보하여 진동 및 충격 성능에서 가장 우수한 특성을 나타내었다. 마지막으로 내구성 시험을 수행하여, 해당 방진구가 플랫폼에 적용 및 실제 운용 시에도 문제가 없는 수준의 내구성과 안정성을 확보하였음을 확인하였다.
본 연구의 결과는 강성에 따른 방진구가 직접적으로 제품에 줄 수 있는 영향과 그 경향성을 보여준다. 실 제품에 적용 전 방진구의 초기 선정부터 성능시험까지 절차와 기준을 제시하는 만큼 유사한 방진구조를 갖는 제품의 설계 시 활용이 가능하며 최적화된 방진구 선정 방법론으로서 활용 가능할 것으로 판단된다.
Fig. 1
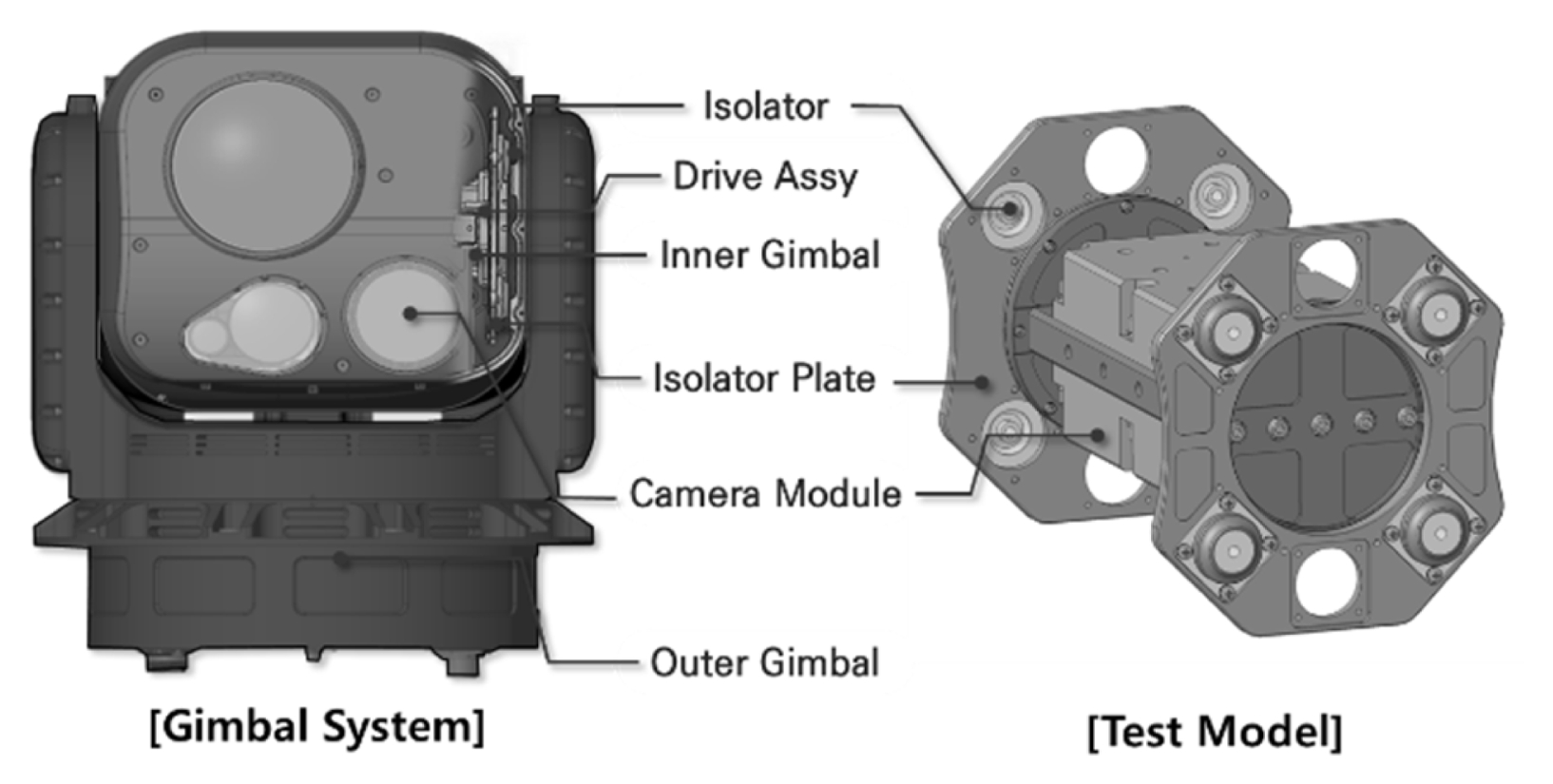
Fig. 2
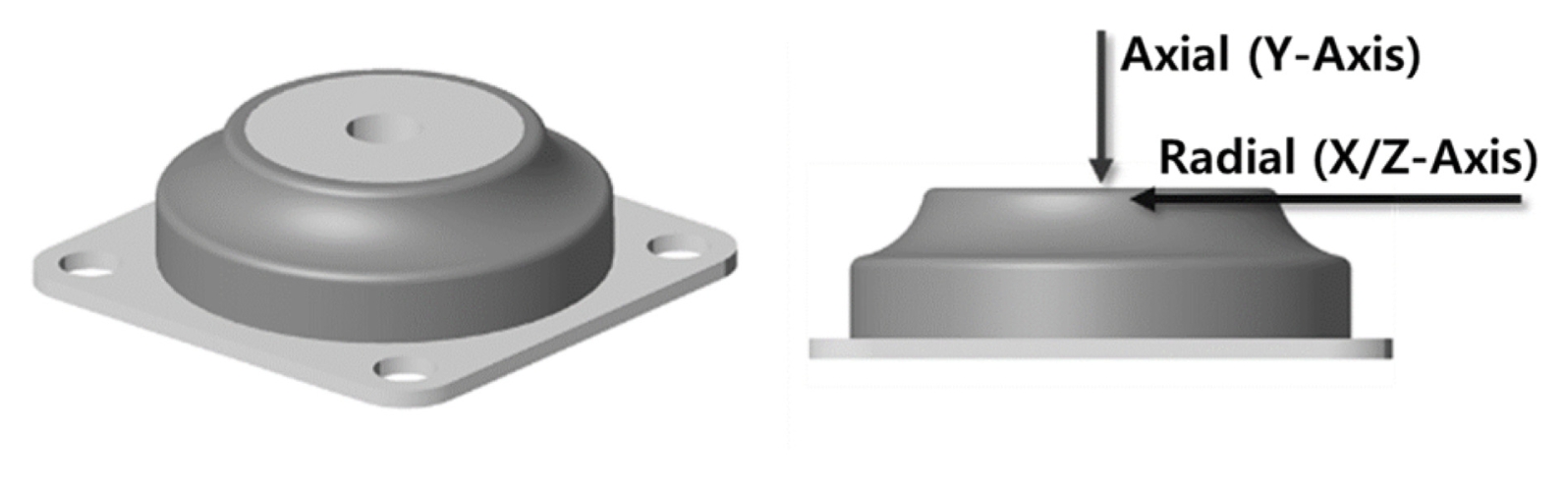
Fig. 3Test setup for performance evaluation of isolators
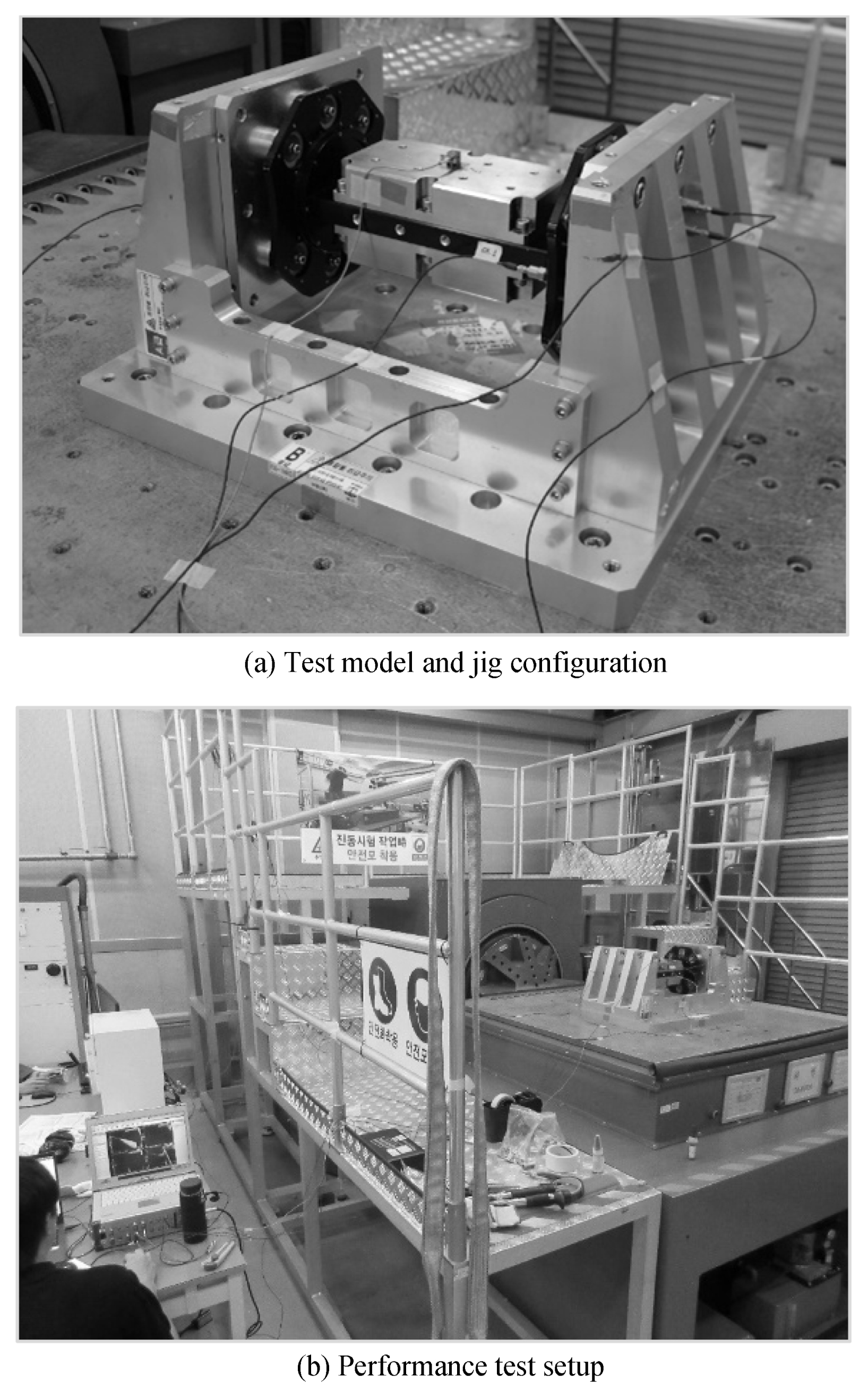
Fig. 4Vibration test input for operational performance
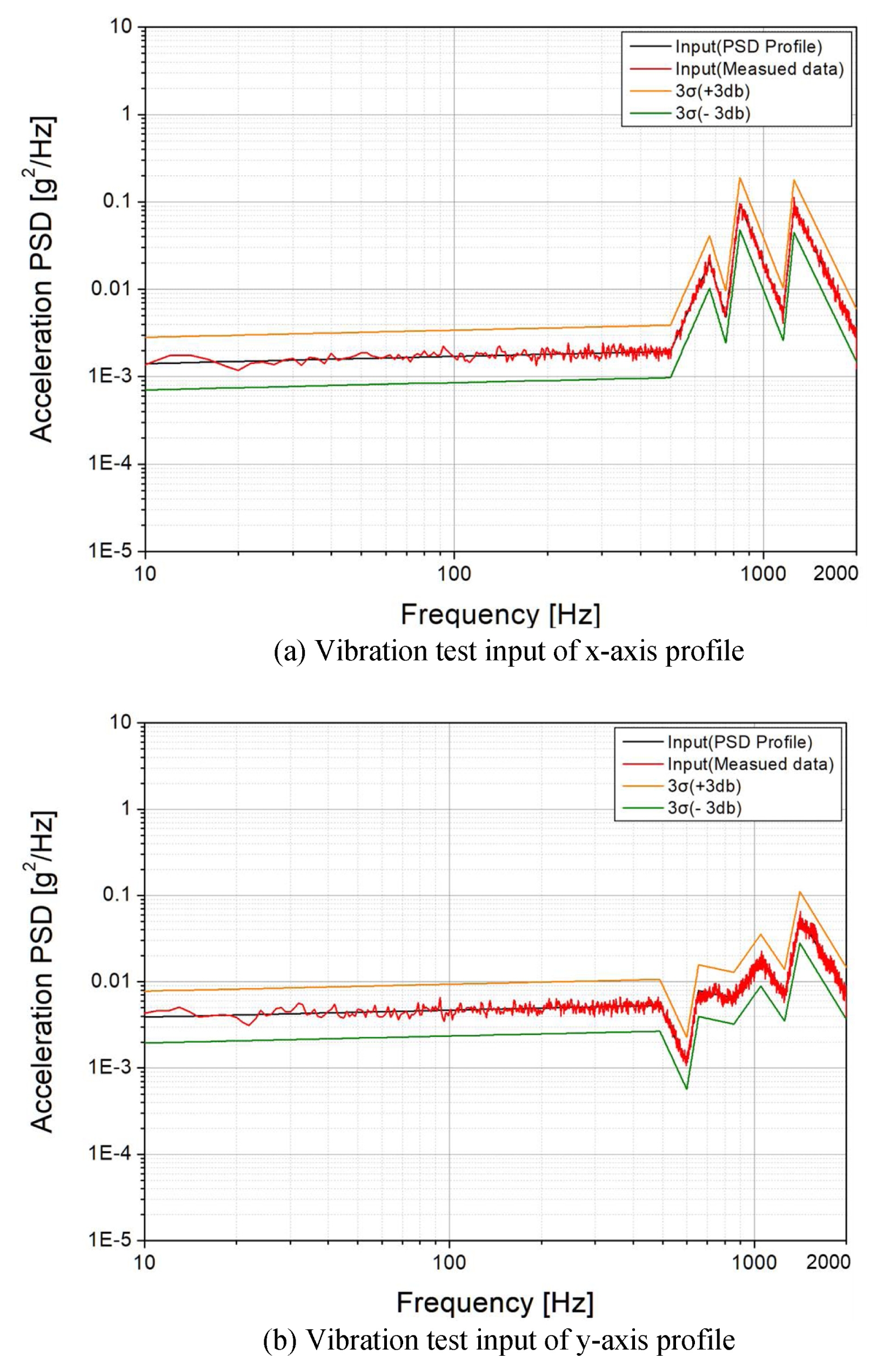
Fig. 5Shock test input waveform [
14] (Adapted from Ref.
14 on the basis of OA)
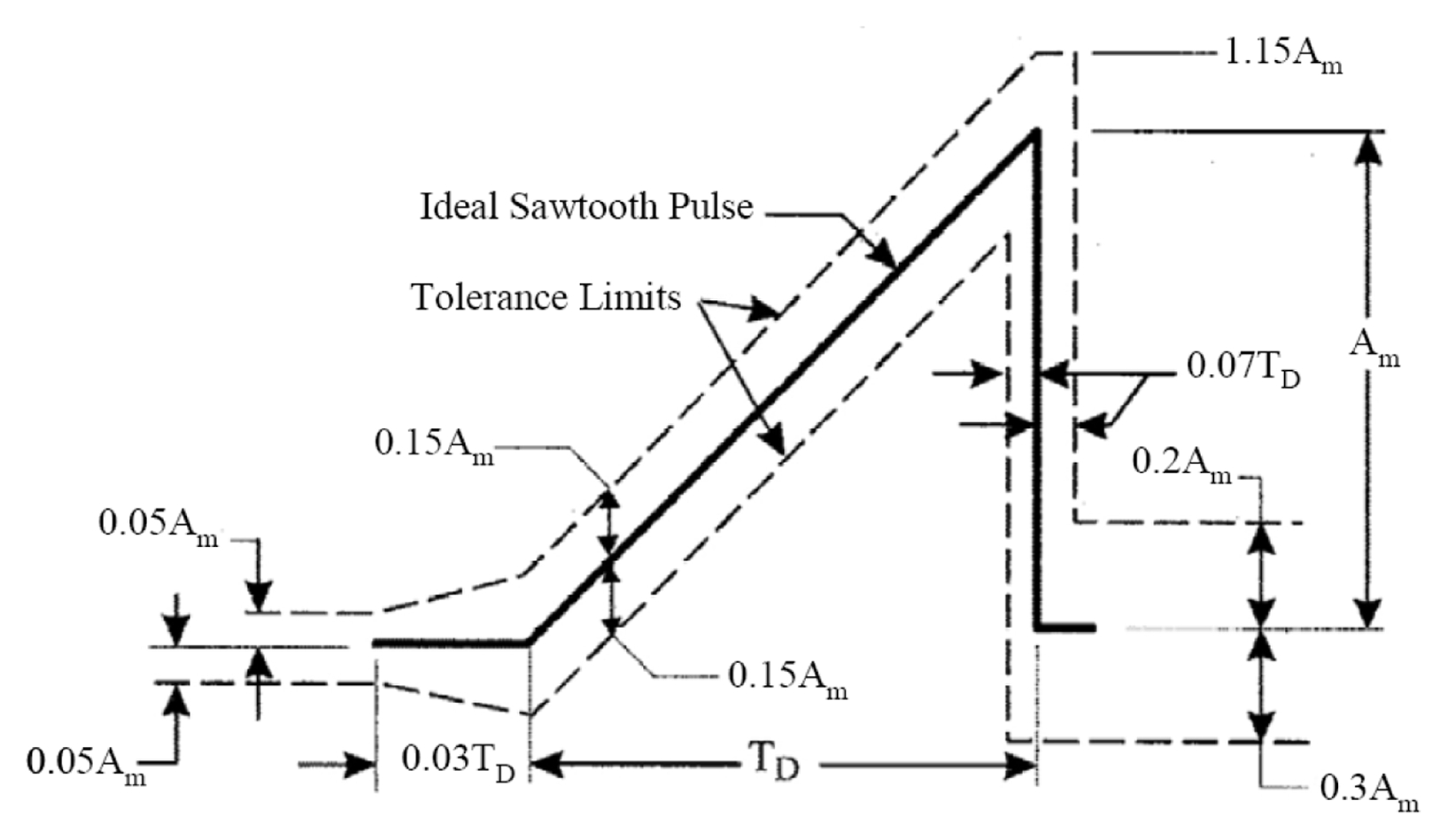
Fig. 6Vibration transmissibility graph during operational vibration
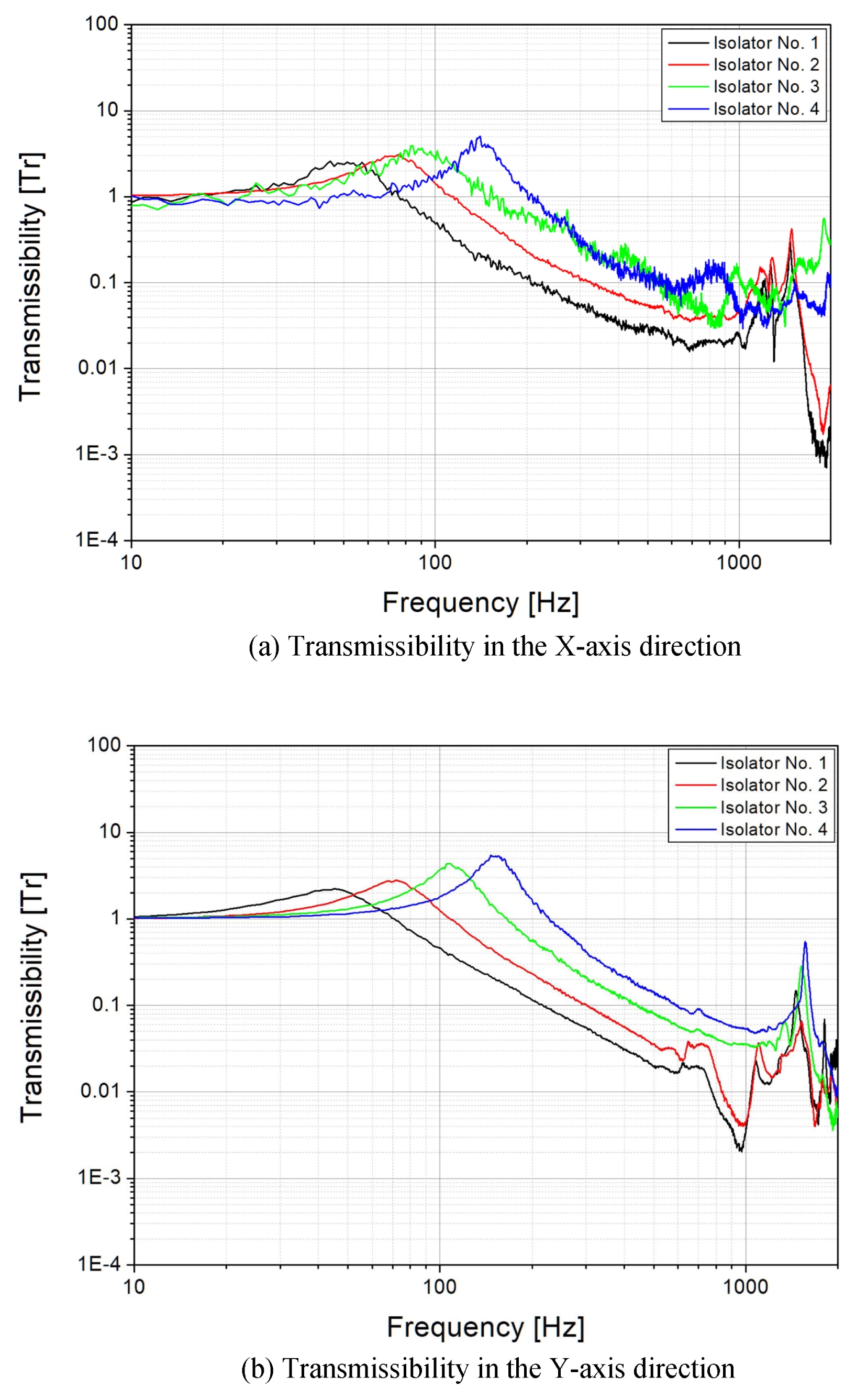
Fig. 7Response graph during shock test
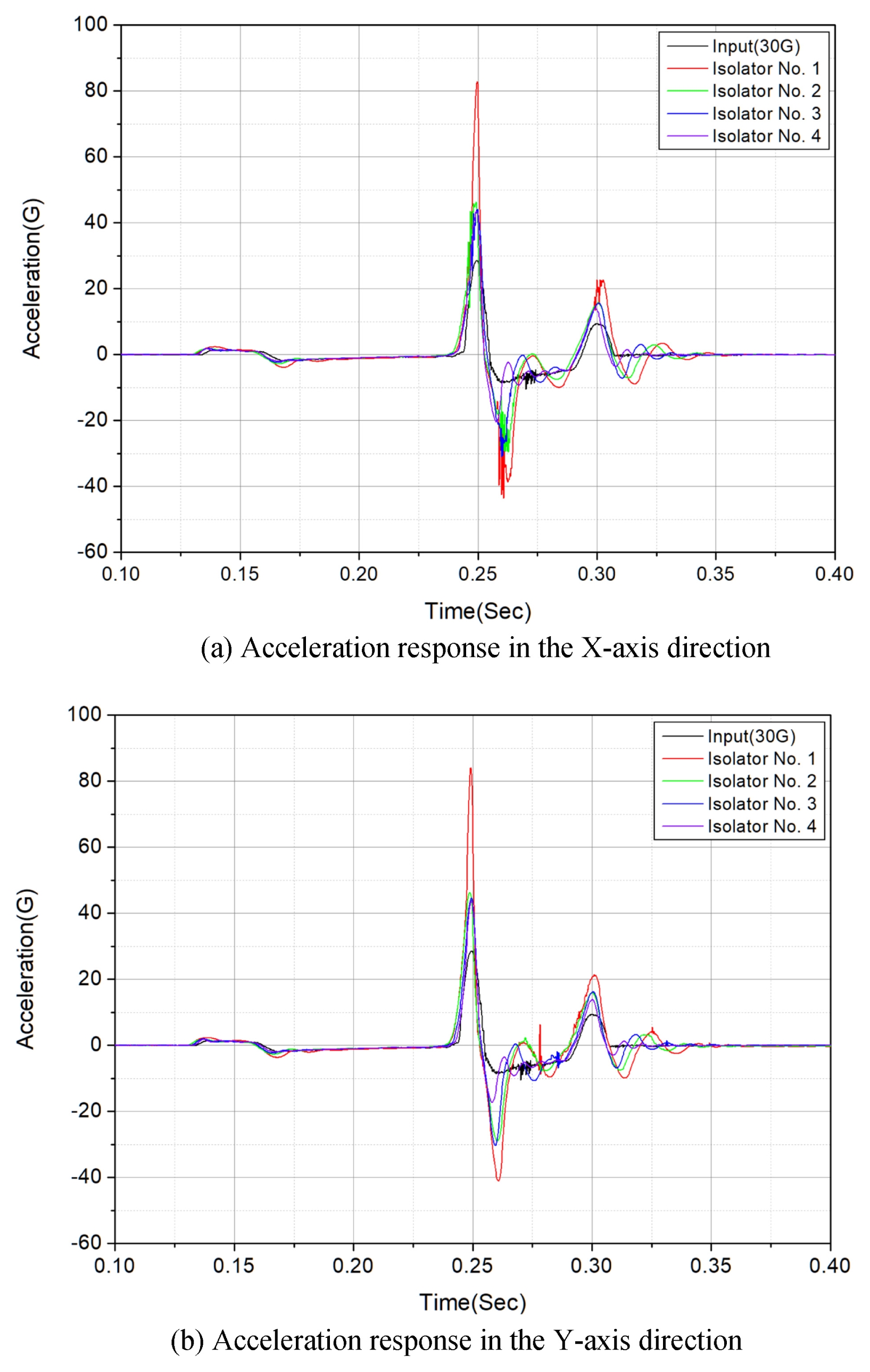
Fig. 8Endurance test input profile [
15] (Adapted from Ref.
15 on the basis of OA)
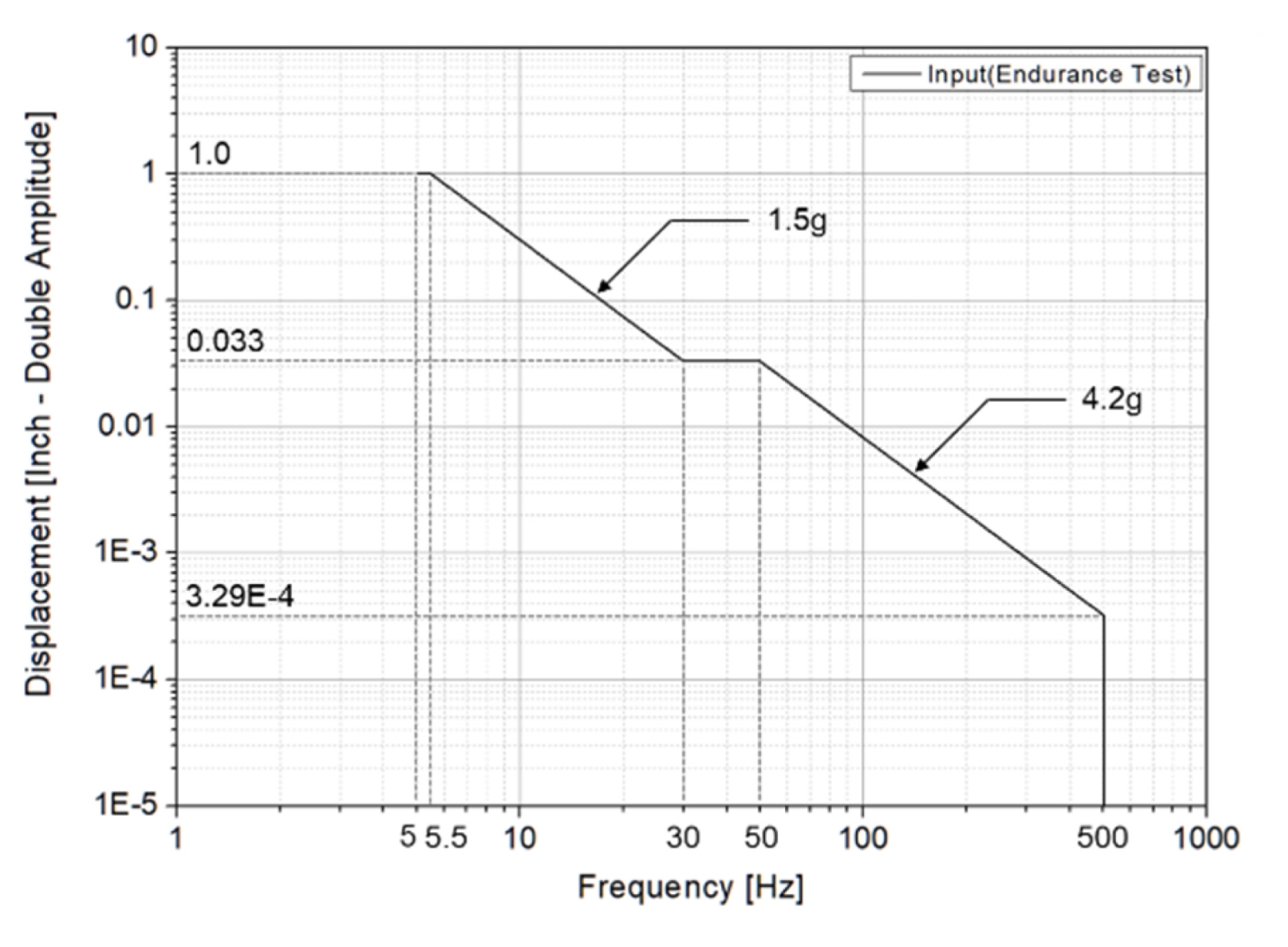
Table 1Elastomeric isolator performance characteristics
Table 1
|
Isolator No. |
Dynamic spring rate [N/mm] |
|
Radial axis (X & Z) |
Axial axis (Y) |
|
0 |
96.8 |
115.2 |
|
1 |
195.3 |
244.8 |
|
2 |
384.8 |
554.2 |
|
3 |
892.4 |
663.4 |
|
4 |
1969.8 |
1905.7 |
Table 2Predicted performance values of the isolators
Table 2
|
Section |
Axis |
Isolator No. |
|
0 |
1 |
2 |
3 |
4 |
|
Natural frequency fn [Hz] |
X & Z |
35.2 |
50.0 |
70.2 |
106.9 |
158.9 |
|
Y |
38.4 |
56.0 |
84.3 |
92.2 |
156.2 |
|
Total deflection dt [mm] |
X & Z |
1.0 |
0.6 |
0.3 |
0.2 |
0.2 |
|
Y |
0.8 |
0.5 |
0.3 |
0.3 |
0.2 |
|
Shock deflection dsh [mm] |
X & Z |
3.5 |
3.6 |
2.9 |
2.6 |
1.9 |
|
Y |
3.6 |
3.2 |
2.5 |
2.1 |
1.7 |
Table 3Isolator characteristics during operational vibration
Table 3
|
Section |
Isolator No. |
|
Axis |
Data |
1 |
2 |
3 |
4 |
|
X |
fn [Hz] |
42.7 |
74.5 |
83.0 |
137.9 |
|
Tr
|
2.57 |
3.11 |
3.93 |
5.02 |
|
GRMS
|
0.675 |
0.845 |
1.712 |
2.421 |
|
IE
|
87% |
83% |
66% |
52% |
|
Y |
fn [Hz] |
43.5 |
73.2 |
106.2 |
152.6 |
|
Tr
|
2.23 |
2.81 |
4.36 |
5.49 |
|
GRMS
|
0.767 |
1.071 |
1.241 |
1.715 |
|
IE
|
80% |
72% |
67% |
55% |
Table 4Shock test results for isolator (maximum shock responses)
Table 4
|
Section |
Isolator No. |
|
Axis |
1 |
2 |
3 |
4 |
|
X [G] |
82.9 |
46.3 |
44.2 |
43.4 |
|
Y [G] |
82.1 |
45.0 |
44.5 |
42.6 |
REFERENCES
- 1. Hwang, S. P., Park, J. H., Hong, S. K., (2012), Control system design for a UAV-mounted camera gimbal subject to coulomb friction, Journal of Institute of Control, Robotics and Systems, 18(7), 680-687.
- 2. Cha, J. H., Shin, M. J., Jeon, H. I., (2022), A study on quality improvement of EOTS shock test for 30 mm wheel type air defense system, Journal of the Korea Academia-Industrial Cooperation Society, 23(11), 492-497.
- 3. Song, A. Y., Yim, S. H., Kwon, B. O., Han, D. H., Jung, H. J., (2021), Structural design through test and analysis of structure equipped with vibration isolator system, Journal of Transactions of the Korean Society for Noise and Vibration Engineering, 31(6), 589-596.
- 4. Kim, S. W., (2020), A study on dynamic parameters identification of elastomeric isolator in the aerial EO equipment with multi-axis gimbal, Ph.D. Thesis, KAIST.
- 5. Kim, K. S., (2021), Shock displacement analysis and test of the elastomer isolator for electro-optical tracking system, Proceedings of the Korean Society of Mechanical Engineers Spring Conference, 1944-1947.
- 6. Choi, J. W., (2021), A Study on the structural stabilization design for vibration attenuation of ultra-light EOTS platform, M.Sc. Thesis, Hanseo University.
- 7. Kang, C. W., Park, H. S., Kwag, D. G., (2023), Study on rubber damping characteristics of vibration reduction mounts for UAVs, Journal of the Convergence on Culture Technology, 9(6), 927-933.
- 8. Cho, H. C., Kwag, D. G., Sim, H. J., (2019), A study on the stabilization of gimbal considering the position of gyro sensor, Proceedings of the Society for Aerospace System Engineering Fall Conference, 355-356.
- 9. Yeo, S. M., (2018), Gyro drift compensation based on Kalman filter and disturbance torque feedforward compensation control for 2-axes gimbal structured line-of-sight stabilization system, M.Sc. Thesis, Gachon University.
- 10. Kim, H. W., Han, S. I., Jang, J. W., Song, K. B., (2023), LOS stabilization controller design of EOTS and performance prediction using disturbance model, Journal of the Korean Military Science and Technology Society, 26(1), 72-82.
- 11. Lord Corporation, (2011), Aerospace & defense isolator catalog. https://ph.parker.com/us/en/product-list/lord-am-005-series-low-profile-avionics-mount
- 12. Steinberg, D. S., (2000), Vibration Analysis for Electronic Equipment. John Wiley & Sons.
- 13. An, B. G., Jeon, Y. G., (2023), Dynamic analysis of EOTS equipped with vibration-proof assembly, Journal of the Korea Academia-Industrial cooperation Society, 24(11), 726-732.
- 14. MIL-STD-810G, (2008), Department of defense test method standard: environmental engineering considerations and laboratory tests.
- 15. MIL-STD-810C, (1975), Environmental test methods.
Biography
- Jong In Bae
Chief Engineer in HW1 Team, Hanwha Systems Co., LTD. His research interest is design and material engineering.
- Hoon Hyuk Park
Senior Engineer in HW1 Team, Hanwha Systems Co., LTD. His research interest is design and material engineering.
- Jae Wook Choi
Engineer in HW1 Team, Hanwha Systems Co., LTD. His research interest is design and material engineering.