ABSTRACT
This paper deals with the current technology status and technology development direction on shape shifting drone. A shape shifting drone is defined as a drone for which its shape and/or function of its platform in flight can be changed by shape shifting technology in order to fulfill a variety of missions effectively in harsh mission environment. A shape shifting drone can be classified as a rotary-wing based, a fixed-wing based, or a biomimetic based shape shifting drone. This work describes technology trends of domestic and foreign countries. It identifies core technologies and development direction. This work will be useful for planning research and development programs on required technology for the development of shape shifting drone in the future.
-
KEYWORDS: Shape shifting technology, Self-shape shifting technology, Separation/combining technology, Rotary wing based shape shifting drone, Fixed wing based shape shifting drone, Biomimetic based shape shifting drone
-
KEYWORDS: 형상변형 기술, 자체 형상변형 기술, 분리/합체 기술, 회전익 기반 형상변형드론, 고정익 기반 형상변형드론, 생체모방 기반 형상변형드론
1. 서론
인공지능, 빅데이터, 블록체인 등 4차 산업혁명 8대 기술 중 하나인 드론(Drone) 기술은 최근 빠르게 발전하고 있으며, 정보통신기술, 센서기술 등의 첨단 기술이 융복합된 시스템으로 국내 산업발전 및 미래 국방 전력 증강에 큰 파급효과를 가져올 것으로 기대되고 있다[
1]. 드론(Drone)이란 꿀벌의 수벌을 의미하는 단어로 조종사가 탑승하지 않은 상태로 항행할 수 있는 무인비행체를 의미한다[
2].
인도 Straits Research 사의 'Market Research Report'에 따르면 세계 민간 드론 시장규모는 2024년 기준 43.3조(299억$)이며 연평균 13.54% 성장하여 2033년에는 135.7조(937억$)에 이를 것으로 전망하고 있다[
3].
현재 과학기술정보통신부 등 민간 부처에서는 드론 기술이 포함된 무인이동체 기술 로드맵을 수립하여 기술개발 중이며[
4], 국방 분야 역시 국방 임무수행에 적합한 국방 드론 개발을 위한 기술 개발전략과 기술 로드맵을 수립하였다[
1].
최근 7-8년 전부터 미국, 독일, 스위스, 영국 등 15개국에서 첨단기술이 적용된 형상변형드론(Shape Shifting Drone)을 개발 중에 있다[
5]. 형상변형드론이란 단일 고정형상(Single Fixed Shape)의 기존 드론과 달리 비행 중 특정 환경이나 상황에서 실시간으로 드론 비행플랫폼의 형상이나 크기를 변형할 수 있는 드론을 말한다[
6].
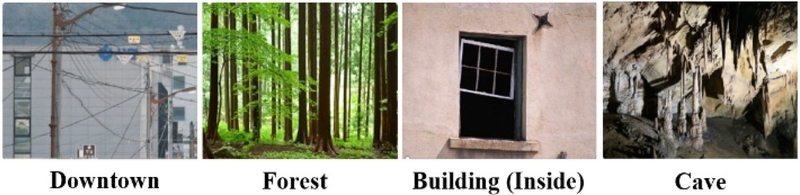
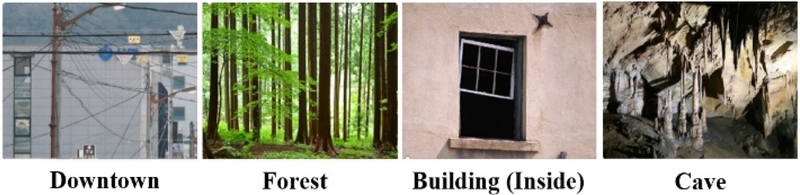
기존 비행플랫폼이 단일 형상(Single Shape)으로 고정된 회전익, 고정익 및 생체모방 드론의 경우 특정 운용환경 및 상황에서 운용하는데 한계가 있다. 단일 고정형상의 회전익 드론은
Fig. 1과 같은 도심지, 산림지, 건물 및 동굴 내부 탐사 등 비행 장애물 다수 지역에서 운용이 어려우며, 단일 고정 형상의 고정익 드론은 활주로가 없는 지역이나 협곡과 같은 협소 공간에서 운용하기 쉽지 않다. 또한, 단일 고정 형상의 생체모방 드론은 건물 및 나무 위에 걸터앉기 정찰이나 비행 중 날개를 접어 좁은 입구를 통과하며 비행하는 등의 다양한 비행운용이 어려운 운용성에 한계를 갖고 있다.
Fig. 1 Operational difficulty environments
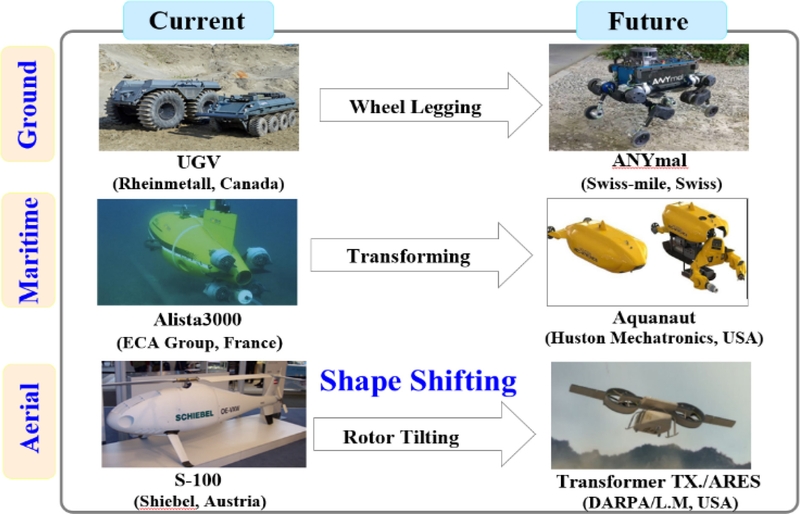
최근 운용지 환경의 제약성을 극복하기 위해
Fig. 2와 같이 기존 단일 고정 형상의 무인체계(Unmanned System)에서 형상 변형 기술(Shape Shifting Technology)을 적용한 무인체계로 발전 중이다.
Fig. 2 The technical development trend of unmanned system
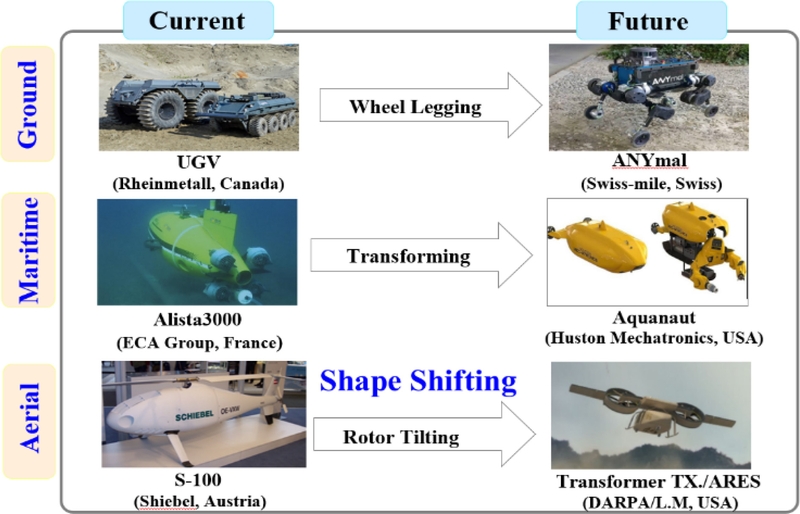
지상에서는 형상변형을 통해 차륜 주행에서 다족 보행이 가능한 무인체계(로봇)가 등장하고 있으며, 해양에서는 과거 수중 감시정찰을 수행하던 무인잠수정이 형상변형을 통해 수중에서 수중작업이 가능한 형태로 변형할 수 있는 무인체계(무인잠수정)가 등장하고 있다. 또한, 공중 분야 역시 비행 중 형상변형을 통해 고정익기와 회전익기의 장점을 갖춘 무인체계(드론)들이 등장하고 있다.
지금까지의 드론 기술은 비행 플랫폼이 단일 고정 형상을 갖는 형태의 드론에 대한 기술 발전에 주로 집중되어 비행난이 환경인 미래 전장 환경 등에서 운용하는데 한계가 있다. 따라서, 국내외적으로 다양한 환경에서 운용 제약(Operational Limitation)을 최소화하며 운용 가능한 형상변형드론에 대한 연구가 수행되고 있다. 형상변형드론이란 특정환경 및 상황에서 지속적인 임무 수행을 위해 자체 형상변형(Self-shape Shifting) 또는 분리/합체(Separation/Combining)의 형상변형 기술을 이용하여 비행 중 비행플랫폼의 크기 및 형상변형이 가능한 드론을 말한다[
6].
본 연구는 향후 형상변형드론 관련 연구개발 과제 발굴 및 기획에 활용될 수 있는 기초자료를 작성하는 데 연구 목적이 있다. 따라서, 국내외 형상변형드론의 연구 사례를 조사하였고 조사된 형상변형드론에 소요되는 핵심기술(Core Technology)을 식별하였다. 그리고, 세계 최고 기술 수준 대비 국내 기술수준을 평가하고 형상변형드론 기술의 발전방향을 예측하여 제시하였다.
2. 형상변형드론
2.1 형상변형 기술
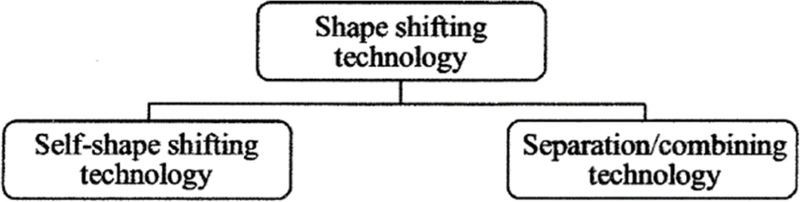
본 연구에서 형상변형 기술이란 형상변형드론의 비행플랫폼 형상이나 기능을 변형시키는데 소요되는 기술로 정의하였으며
Figs. 3과
4과 같이 자체 형상변형 기술과 분리/합체기술로 분류할 수 있다.
Fig. 3The classification of shape shifting technology
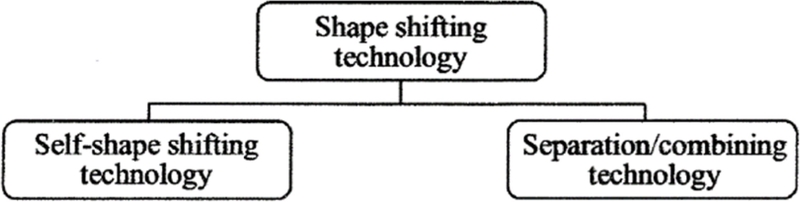
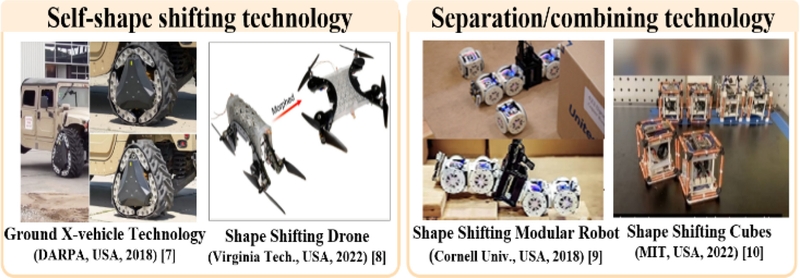
Fig. 4Examples [7-10] of self-shape shifting technology and separation/combining technology (Adapted from Ref. 7-10 on the basis of OA)
자체 형상변형 기술이란 플랫폼(Platform)에 미리 형상변형이 가능한 구조를 구현해 놓은 후 특정 환경이나 상황에서 플랫폼의 일부 형상[
7]이나 전체 형상을 변형시키는데 소요되는 기술로 정의하였으며, 플랫폼의 전체 또는 일부를 구성하는 소재의 변형 특성[
8]을 이용하여 플랫폼 형상을 변형시키는 기술도 자체 형상변형 기술로 정의하였다.
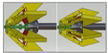
분리/합체 기술이란 협소한 환경 또는 임무 수행 장애 환경을 극복하기 위해 동종 또는 이종 플랫폼과 합체 또는 분리하여 형상을 변형하는데 소요되는 기술로 정의하였으며, 분리/합체 기술에는 기구학적 분리/합체 기술과 전자기력을 활용한 분리/합체 기술[
9,
10] 있다.
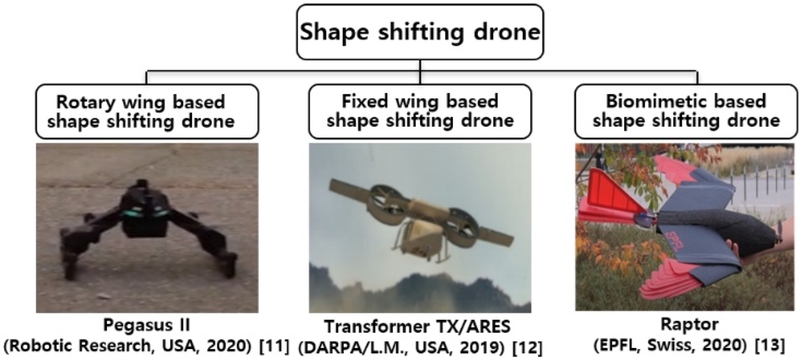
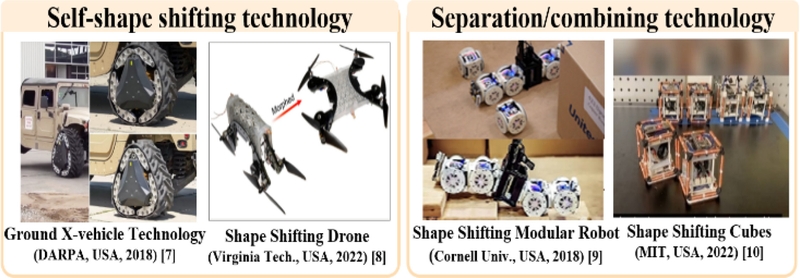
본 연구에서 형상변형드론은 기존 단일 고정 형상 드론과 마찬가지로 비행 형상 구조에 따라
Fig. 5와 같이 회전익 기반 형상변형드론, 고정익 기반 형상변형드론 및 생체모방 기반 형상변형드론으로 분류하였다.
Fig. 5The classification and examples [11-13] of shape shifting drone (Adapted from Ref. 11-13 on the basis of OA)
회전익 기반 형상변형드론은 기존 단일 고정 형상인 회전익 드론과 같이 이착륙 및 비행 전 과정에 걸쳐 로터 블레이드(Rotor Blade)에서 발생하는 양력(Lifting Force)을 이용하여 비행하는 드론으로 정의하였다[
6]. 회전익 기반 형상변형드론은 건물 및 동굴 내부 등과 같이 좁은 통로를 진입하여 비행하거나 비행 장애물이 많은 도심지나 산림지 사이를 비행할 때 주변 장애물과 충돌을 방지하기 위해 비행 중 형상을 변형하며 안정적으로 비행할 수 있다. 또한, 공중비행-지상주행 등 다영역(Multi-domain)에서 정찰 임무를 수행하기 위해 비행 중 공중비행에서 지상주행 형태로 이동방식의 변형이 가능하다[
11].
고정익 기반 형상변형드론은 기존 단일 고정형상의 고정익 드론과 마찬가지로 날개에서 발생하는 양력(Lifting Force)을 이용하여 비행한다는 점은 동일하나 이착륙을 위한 공간이 협소한 곳에서 드론 비행플랫폼의 형상변형을 통해 수직이착륙이 가능한 드론을 말한다[
12].
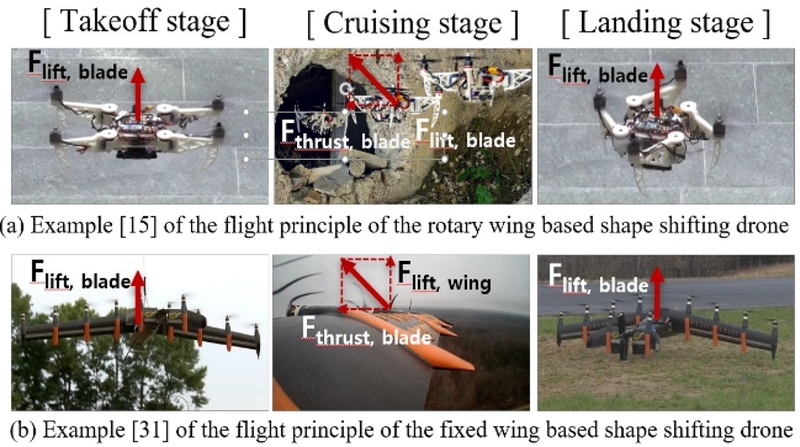
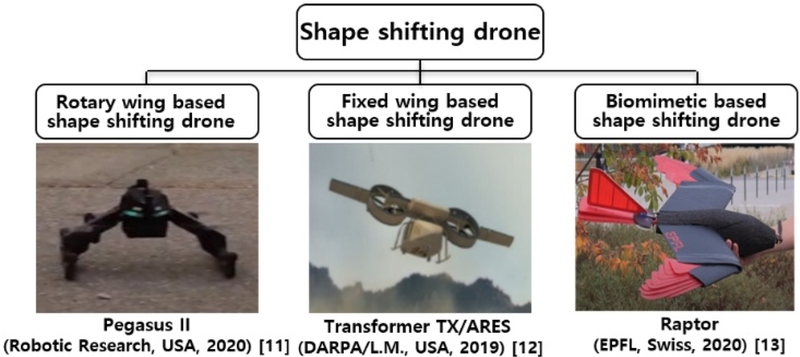
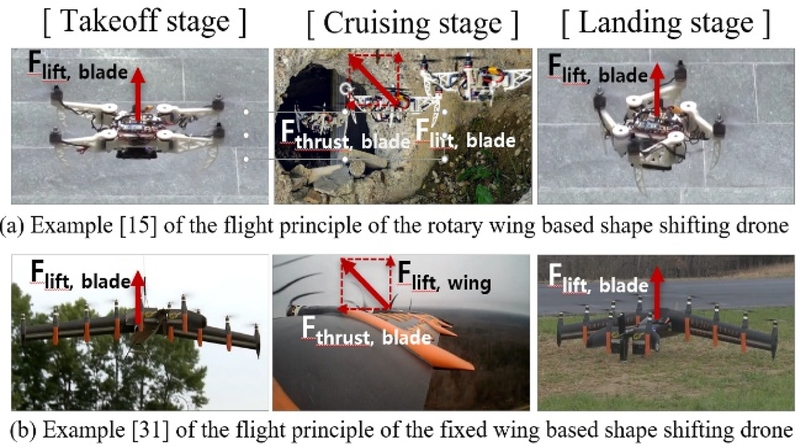
Fig. 6에 나타낸 바와 같이 고정익 기반 형상변형드론과 회전익 기반 형상변형드론과의 주된 차이점은 회전익 기반 형상변형드론은 이착륙을 포함한 비행 전 과정에 걸쳐 로터 블레이드에서 발생하는 양력만을 이용하여 비행하는 데 반하여, 고정익 기반 형상변형드론은 이착륙 등 특수상황에서만 로터 블레이드에서 발생하는 양력을 이용하고 이륙 후에는 형상변형을 통해 날개에서 발생하는 양력과 로터 블레이드에서 발생하는 추력(Thrusting Force)을 이용하여 비행한다는 점에서 차이가 있다[
6].
Fig. 6The difference of flight principle between rotary wing based shape shifting drone and fixed wing based shape shifting drone [15,31] (Adapted from Ref. 15, 31 on the basis of OA)
생체모방 기반 형상변형드론은 조류의 비행 원리를 모방하여 비행한다는 점에서 기존 생체모방 드론과 유사하다. 그러나, 기존 생체모방 드론은 대부분 날개펄럼거림(Flapping)만으로 비행하는 것과 달리 생체모방 기반 형상변형드론은 날개를 접거나 펴는 등 날개 형상변형이 가능하다는 점에서 차이가 있다[
6]. 날개 폄/접힘 형상변형은 좁은 입구 통과 비행이나 건물/나무 위에 걸터앉아 감시정찰 임무 수행을 용이하게 하며, 날개 전/후퇴각 변형은 선회비행이나 급기동 비행을 가능하게 한다[
13].
형상변형드론은 기존 단일 고정형상 드론을 활용하기 어려운 다양한 환경에서 드론의 비행 플랫폼 형상변형을 통해 운용이 가능한 장점을 갖고 있다. 기존 단일 고정형상 드론과 형상변형드론의 장단점은
Table 1에 나타내었다. 형상변형드론도 장점만 있는 것은 아니다. 비행 중 형상변형을 위해 추가되는 구성품으로 인해 드론 자체중량이 증가하여 동일한 용량의 배터리(Battery) 사용 시 단일 고정형상 드론보다 상대적으로 운용 시간이 줄어드는 단점을 가지고 있다[
6].
Table 1Comparison of major characteristic between fixed shape drone and shape shifting drone
Table 1
|
Drone type |
Characteristic |
|
Velocity |
Range |
Payload |
Camouflage |
Environment
overcoming |
Operation
expandability |
|
Fixed shape drone |
Rotary wing |
○ |
○ |
□ |
X
|
○ |
X
|
|
Fixed wing |
◎ |
◎ |
○ |
X
|
X
|
X
|
|
Biomimetic |
X
|
X
|
X
|
◎ |
△ |
X
|
|
Shape shifting drone |
Rotary wing |
□ |
□ |
△ |
X
|
◎ |
◎ |
|
Fixed wing |
○ |
○ |
△ |
X
|
◎ |
○ |
|
Biomimetic |
X
|
X
|
X
|
◎ |
□ |
□ |
2.3 형상변형드론 응용 분야
형상변형드론의 응용 분야는 기존 단일 고정형상 드론이 접근하기 어려운 비행 장애물 다수 지역과 비행 공간 협소 지역 탐사 시 드론 크기의 축소 변형[
14-
18]을 통해 장애물과 충돌을 회피하며 비행하거나 또는, 건물이나 시설 내부 상황 파악 필요 발생 시 공중드론 형상으로 관심지역에 신속히 접근하여 창문을 통해 건물 내부 진입 후 복도를 지상주행하며 건물 내부 상황을 운용자에게 전송하는 데 활용할 수 있다[
8,
11,
19-
23]. 그리고, 화물 크기 맞춤형 형상변형드론을 통해 다양한 크기 및 형상의 화물을 배송할 수 있으며[
24], 강이나 저수지 등의 수중상태 정보 획득을 위해 비행 중 수중에 입수하여 순항이 필요한 곳에 활용될 수 있다[
25]. 또한, 다수 드론 합체를 통해 다양한 고중량 화물 배송에 활용될 수 있을 것이다[
26-
28].
또한, 고정익 모선과 회전익 자선의 공중 분리/합체 기술을 통해 원거리 해상감시 중인 고정익 항공기에서 회전익 자선을 분리하여 불법조업 중인 어선의 근거리 정밀 감시정찰이 가능할 것이며[
29,
30], 고정익 기반 형상변형드론은 항해 중인 함선이나 활주로가 없는 지역에서 수직이착륙을 통해 물품 수송 등의 운용이 가능할 것이다[
31-
40].
생체모방 기반 형상변형드론은 나무, 전선, 첨탑 위에 걸터앉은 상태로 감시정찰 임무 수행을 통해 도심지 교통상황 모니터링, 산불 감시 및 송전탑 등의 시설물 상태 확인 등에 활용될 수 있을 것이다[
41,
42]. 또한, 생체모방 기반 형상변형드론은 회전익 및 고정익 드론과 비교할 때 위장성이 뛰어나 잘 탐지되지 않으므로 국방 분야와 같이 은닉성이 중요한 응용 분야에서 유용할 것으로 판단된다[
13,
43-
48].
3. 형상변형드론 관련 국내외 기술개발현황
3.1 국외 기술개발 사례
형상변형드론 관련 국외 기술개발 사례로 15개 국가에서 총 45건의 기술개발 사례를 조사하였으며 국가별 기술개발 사례 조사 건수는
Table 2와 같다.
Table 2The number of foreign country's research cases on shape shifting drone
Table 2
|
No. |
Country |
Rotary wing based shape shifting
drone |
Fixed wing based shape
shifting drone |
Biomimetic based
shape shifting drone |
Total |
Self-shape
shifting |
Seperation
/combining |
Self-shape
shifting |
Seperation
/combining |
Self-shape
shifting |
|
1 |
USA |
6 |
2 |
5 |
1 |
1 |
15 |
|
2 |
Switzerland |
3 |
- |
2 |
- |
2 |
7 |
|
3 |
Japan |
3 |
- |
- |
- |
- |
3 |
|
4 |
Germany |
- |
- |
1 |
- |
2 |
3 |
|
5 |
UK |
- |
- |
1 |
- |
2 |
3 |
|
6 |
France |
1 |
- |
1 |
- |
- |
2 |
|
7 |
Israel |
1 |
- |
- |
- |
- |
1 |
|
8 |
India |
1 |
- |
- |
- |
- |
1 |
|
9 |
Norway |
1 |
1 |
- |
- |
- |
2 |
|
10 |
Italia |
- |
1 |
- |
- |
- |
1 |
|
11 |
Brazil |
- |
1 |
- |
- |
- |
1 |
|
12 |
Singapore |
- |
- |
1 |
- |
- |
1 |
|
13 |
Spain |
- |
- |
1 |
- |
- |
1 |
|
14 |
Australia |
- |
- |
- |
1 |
- |
1 |
|
15 |
China |
1 |
1 |
- |
- |
1 |
3 |
|
Total |
17 |
6 |
12 |
2 |
8 |
45 |
Table 2를 살펴보면 형상변형드론 관련 기술개발 사례는 미국이 15건으로 가장 많이 조사되었으며, 미국의 형상변형드론 기술개발 사례는 각각
Table 3과
4에 나타냈다.
Table 3에 나타낸 미국의 회전익 기반 형상변형드론에 자체 형상변형 기술의 경우 대부분 대학연구실을 중심으로 기술개발 중이며[
8,
14,
19,
20,
49], 형상변형을 통해 공중비행과 지상주행이 가능한 드론으로 2020년 Robotic Research사가 개발한 Pegasus-II [
11]와 2023년 California Institute of Technology가 개발한 M4 [
20]가 있으며, Pegasus-II의 경우 2020년 미 육군이 실시한 운용시험 평가를 받았다. 또한, 같은 해인 2020년에 미 육군연구소는 형상변형드론 기술구현을 위한 형상기억 플라스틱(Shape-memory Plastic)을 개발하였으며[
50], 2022년 Virginia Tech에서는 Kirigami 기법과 소재특성을 이용하여 드론 비행플랫폼 전체 형상이 변형가능한 형상변형드론 기술을 개발하였다[
8]. 그리고,회전익 기반 형상변형드론에 분리/합체 기술의 경우 NASA는 2019년 동종의 드론을 합체하여 지상주행이 가능한 형상변형드론 기술을 개발하였다[
21]. 메가드론(Mega-drone)은 Amazon사가 출원한 모듈결합형 형상변형드론 개념[
26]으로 아직 구현된 기술은 아니나 향후 다수의 소형드론을 활용하여 고중량 화물을 운송하는 개념으로 활용할 수 있다고 생각된다.
Table 4에 나타낸 미국의 고정익 기반 형상변형드론에 자체 형상변형 기술의 경우 틸트덕트(Tilt-duct), 틸트윙(Tilt-wing) 방식의 수직이착륙이 가능한 형상변형드론을 개발 중이다. NASA의 GL-10은 신개념 추진방식인 분산전기추진방식(Distributed Electric Propulsion, DEP)을 적용한 1/2축소기로 대표적인 틸트윙 형상변형 드론이다[
31]. 또한, 분리/합체기술의 경우 2021년에 Florida Tech는 원거리 목적지까지 정확한 화물배송을 위해 고정익 모선 드론(Mother Ship Drone)과 회전익 자선드론(Child Ship Drone)을 공중분리/합체하는 기술을 개발하였다[
29]. 그리고, 미국의 생체 모방 기반 형상변형드론은 2016년 UIUC (University of Illinois Urbana Champaign)는 날개를 접고 펼 수 있는 박쥐형 형상변형 드론인 BatBot을 개발하였다[
43].
Table 2에서 2번째로 연구사례가 많은 스위스의 형상변형드론 기술개발 사례는
Table 5에 나타냈다. 스위스의 회전익 기반 형상변형드론에 있어 2018년 스위스 Voliro사와 취리히 대학이 공동개발한 Omni-orientational Hexacopter [
51]는 비행 중 비행자세를 자유롭게 변형 가능하며, 취리히 대학의 Foldable Drone [
15]은 협소지역 통과 시 비행 플랫폼의 크기 축소변형이 가능하여 건물 내부 진입, 재난지역 정찰 및 동굴 내부 탐사에 활용될 수 있을 것으로 판단된다. 또한, 2023년 EPFL이 개발하여 Elythor사로 기술이전한 시설검사용 드론은 형상변형을 통해 비행 중 바람을 이용하여 비행시간을 연장할 수 있다[
52].
스위스 고정익 기반 형상변형드론에 있어 2019년 취리히대학은 Tiltwing UAV [
34]를 개발하였으며, 2016년에는 Paceflyer S100 [
35]을 개발하였다. 생체모방 기반 형상변형드론에 있어 2020년 EPFL의 Raptor [
13]의 경우 비행추진력을 기존 항공기처럼 비행플랫폼 첨두부에 장착된 프로펠러를 통해 추진력을 얻어 비행하며, 비행 중 주날개 및 꼬리날개 폄/접힘 등의 형상변형을 통해 급기동 비행, 걸터앉기 착륙을 위한 감속비행 및 자세변형 비행이 가능한 드론이다. 또한, 2023년 EPFL는 Griffin 프로젝트를 통해 건물이나 나무 위에 걸터앉기 위한 파지(Grasping) 가능 다리 기술을 개발하였다[
41].
일본의 형상변형드론 관련 연구사례는
Table 6에 나타냈다. 일본의 경우 2017년과 2018년 도쿄 대학는 단위비행모듈을 일렬로 연결한 회전익 기반 형상변형드론 기술을 개발하였으며, 단위비행모듈의 개별적인 통합비행제어를 통해 비행 중 자유로운 형상변형이 가능한 드론 기술을 개발하였다[
16,
17]. Dragon [
17]의 경우 실제 용(Dragon)과 같이 자유로운 형상변형을 통해 좁은 입구를 주변과 충돌없이 통과 비행하는 기술을 구현하였으며, SPIDAR [
22]는 단위비행모듈들의 통합제어를 통해 거미와 같은 지상보행과 공중비행이 가능한 기술을 개발하였다.
독일의 형상변형드론 관련 연구 사례는
Table 7에 나타냈다. 독일은 고정익 기반 형상변형드론에 있어 신개념 추진 방식인 분산전기추진장치를 적용한 전기식 수직이착륙기(eVTOL) 기술을 개발하고 있다[
53]. 생체모방 기반 형상변형드론의 경우 2018년 Festo 사는 날개 폄/접힘이 가능한 BionicFlyingFox [
44]를 개발하였으며, 2020년 Festo 사는 다수의 유연 깃털로 구성된 날개를 갖는 BionicSwift [
45]를 개발하였다. BionicSwift는 날갯짓 시 비행력 생성 효율을 높이기 위해 실제 조류와 같이 날개 깃털이 공기저항에 의해 유연하게 변형되는 구조로 되어 있다.
영국의 형상변형드론 관련 연구사례는
Table 8에 나타났다. 영국은 고정익 기반 형상변형드론으로 2018년 사우샘프턴 대학에서 Morphing UAV를 개발하였다[
54]. 생체모방 기반 형상변형드론으로 건물이나 나무 위에 걸터앉기 위해 파지(Grasping)가 가능한 다리 기술을 2021년 미국 스탠포드 대학에서 개발하였으며[
42], 2016년에는 임페리얼 컬리지에서 공중비행 중 수중입수가 가능한 다영역 운용가능 형상변형드론 기술을 개발하였다[
46].
프랑스의 형상변형드론 관련 연구 사례는
Table 9에 나타냈다. 회전익 기반 형상변형드론의 경우 2018년에 프랑스 엑스 마르세유 대학에서 비행 중 자체 형상변형을 통해 좁은 입구 통과 비행이 가능한 Morphing Quadcopter를 개발하였다[
18]. 고정익 기반 형상변형드론의 경우 2018년에 프랑스 Airbus사는 틸트윙 비행체 시연기인 A3 Vahana를 개발하였다[
36].
Table 9The research situation of France on shape shifting drone (Adapted from Ref. 18, 36 on the basis of OA) Type Items Appearance Research
Table 9
|
Type |
Items |
Appearance |
Research institute (Year) |
|
Rotary wing based shape shifting drone |
Self-shape
shifting |
Morphing Quadcopter [18] |

|
Aix Marseille Univ. (France, 2018) |
|
Fixed wing based shape shifting drone |
Self-shape
shifting |
A3 Vahana [36] |

|
Airbus Co. (2018) |
노르웨이의 형상변형드론 관련 연구 사례는
Table 10에 나타냈다. 2024년 노르웨이 과학기술대학교는 비행 플랫폼이 유연하게 변형이 가능한 드론 기술을 개발하여 좁은 입구 통과 비행 시 벽면과의 충돌 시에도 안정적으로 비행할 수 있는 드론 기술을 개발하였다[
55]. 또한, 2015년에 노르웨이 오슬로 대학교는 기초연구 수준이지만 다수의 소형드론을 결합한 고하중 화물수송용 Megakopter를 개발하였다[
27].
Table 10The research situation of Norway on shape shifting drone (Adapted from Ref. 27, 55 on the basis of OA)
Table 10
|
Type |
Items |
Appearance |
Research institute (Year) |
|
Rotary wing based shape shifting drone |
Self-shape shifting |
Morphy [55] |

|
Norwegian Univ. of science and technology (Norway, 2024) |
|
Separation/combining |
Megskopter [27] |

|
Univ. of Oslo (Norway, 2015) |
중국의 형상변형드론관련 연구사례는
Table 11에 나타내었다. 회전익 기반 형상변형드론의 경우 2023년에 중국 퉁지대학교에서 자체 형상변형을 통해 공중비행 중 수중 입수하여 수중 순항이 가능한 TJ-FlyingFish를 개발하였으며[
25], 2024년 중국 난징 대학에서 6개의 드론으로 공중 분리가 가능한 공중분리 드론 기술을 개발하였다[
56]. 생체모방 기반 형상변형드론의 경우 2024년 중국 서북공업대학(NPU)에서 비행 중 날개를 접으며 비행할 수 있는 Xiaosun 을 개발하였다[
47].
기타 국외 형상변형드론 관련 연구 사례는
Table 12에 나타냈다. 2019년에 이스라엘 the Ben Gurion대학에서는 자체 형상변형을 통해 공중비행-지상주행이 가능한 FSTAR를 개발하였다[
23]. 2021년에 인도 IIIT-Hyderabad는 수송할 화물크기 및 형상에 맞춰 형상변형이 가능한 Elasticopter를 개발하였다[
24]. 2018년에 이탈리아 Audi사는 Airbus사와 합작하여 자율지상 주행이 가능한 무인차량과 분리/합체가 가능한 드론 택시 Pop.up Next 운용개념을 수립하였다[
57]. 2020년에 브라질 상파울루 대학교는 다수의 소형 드론을 결합하여 대형드론 성능모사용 드론인 DRA를 개발하였다[
28]. 2017년 싱가포르 대학은 형상변형을 통해 수직이착륙이 가능한 테일시터(Tail-sitter)형 드론인 U-Lion을 개발하였다[
37]. 2012 스페인 INTA(Spanish National Institute of Aerospace Technology)는 헬리콥터형으로 변형하여 수직이착륙이 가능한 HADA (Helicopter ADaptive Aircraft)를 개발하였다[
58]. 2006년 호주 시즈니 대학에서 공중 급유용 연결기를 이용하여 고정익 드론 간 공중 급유 및 공중 분리/결합 비행시험을 시현하였다[
59].
Table 12The research situation of the other foreign countries shape shifting drone (Adapted from Ref. 23, 24, 28, 37, 57, 58, 59 on the basis of OA)
Table 12
|
Type |
Items |
Appearance |
Research institute (Year) |
Rotary wing based
shape shifting drone |
Self-shape
shifting |
FSTAR [23] |

|
The Ben Gurion Univ. of the Negev (Israel, 2019) |
|
Elasticopter [24] |

|
IIIT-Hyderabad (India,2021) |
Separation/
combining |
Pop.up Next [57] |

|
Airbus &Audi Co. (Italia, 2018) |
|
DRA [28] |

|
Univ. of Sao Paulo (Brazil, 2020) |
Fixed wing based
shape shifting drone |
Self-shape
shifting |
U-Iion [37] |

|
National Univ. of Singapore (Singapore, 2017) |
|
HADA [58] |

|
INTA (Spain, 2012) |
Separation/
combining |
Aerial refueling [59] |
|
Univ. of Sydney (Australia, 2006) |
3.2 국내 기술개발 사례
형상변형드론 기술과 직접 관련된 국내 기술개발 사례는 7건이며, 특허 및 유사기술개발현황 포함 시 총 14건의 사례를 조사하였다. 국내 사례 조사현황 및 기술개발 사례는 각각
Table 13과
Table 14에 나타냈다. 참고로
Table 13의 괄호 안 숫자는 특허 및 유사 관련 기술개발 사례를 포함했을 때 기술개발 사례 조사 건수이다.
Table 13The number of domestic research cases on shape shifting drone
Table 13
|
Rotary wing based shape shifting drone |
Fixed wing based shape shifting drone |
Biomimetic wing based shape
shifting drone |
Total |
|
Self-shape shifting |
Separation/ combining |
Self-shape shifting |
Separation/ combining |
Self-shape shifting |
|
1 |
- |
4 |
1 |
1 |
7 |
|
(3) |
(3) |
(4) |
(3) |
(1) |
(14) |
Table 14The domestic research situation on shape shifting drone (Adapted from Ref. 30, 38, 39, 40, 48, 60, 61, 62, 63, 64, 65, 66, 67, 68 on the basis of OA)
Table 14
|
Type |
Items |
Appearance |
Research institute (Year) |
Rotary wing based
shape shifting drone |
Self-shape
shifting |
Life-saving drone with variable structure [60] |

|
Sangmyung Univ. (2021) |
|
Propeller allocation reconfigurable drone [61] |

|
KARI (2015) |
|
Payload with variable stiffiiess mechanism applied drone [62] |

|
Seoul National Univ. (2018) |
Separation/
combining |
Aerial manipulation drone using multiple drone [63] |

|
Seoul National Univ. (2017) |
|
A drone with connector for combining with mobile robot [64] |

|
Chungnam National Univ. (2018) |
|
Mother-child drone using magnetic force [65] |

|
Uconsystem Co., Ltd., (2016) |
Fixed wing based
shape shifting drone |
Self-shape
shifting |
Unmanned Vehicle for air/ground/water environment [66] |

|
Konkuk Univ. (2019) |
|
QTP-UAV [38] |

|
KARI (2018) |
|
Tiltduct UAV (TD-40/TD-20) [39] |

|
KARI (2017) |
|
Tiltduct UAV (TD-100/TD-60) [40] |

|
KARI (2012) |
Separation/
combining |
Aerial separation/combining of mother and child UAV [30] |

|
Korea Aerospace Univ. (2022) |
|
Docking-undocking of unmanned vehicle [67] |

|
KARI (2023) |
|
Aerial separation mechanism [68] |
|
KAIST (2022) |
Biomimetic wing based
shape shifting drone |
Self-shape
shifting |
The wing for beetle mimicking MAV [48] |

|
Konkuk Univ. (2019) |
국내 회전익 기반 형상변형드론 관련 기술개발 사례 중 자체 형상변형 기술관련 기술개발 사례로 2021년 상명대학교에서 공중비행과 지상주행이 가능한 가변형 인명구조용 드론 개념연구가 있으며[
60], 2015년 한국항공우주연구원은 드론 본체와 연결된 로터 블레이드부 회전을 통해 외란 저항성 증대 및 좁은 공간 비행이 가능한 자체 형상변형 개념 연구를 수행하였다[
61]. 또한, 2018년 서울대학교는 종이접기 방식의 가변강성 메커니즘 로봇팔을 적용한 자체 형상변형드론 관련 연구를 수행하였다[
62]. 회전익 기반 형상변형드론기술 중 분리/합체기술관련 기술개발 사례로 2017년 서울대학교는 동종의 다수 드론 합체를 통해 공중조작이 가능한 드론 기술을 개발하였다[
63].
또한, 2018년 충남대학교에서 지상로봇과 합체를 위한 연결부 설계 및 합체의 통합주행제어 기술을 개발하였다[
64]. 그리고, 2016년 유콘 시스템은 자력을 이용하여 모선 드론과 자선 드론의 분리/합체 관련 개념 연구를 수행하였다[
65].
국내 고정익 기반 형상변형드론 연구 사례 중 자체 형상변형 기술 관련 기술개발 사례로 2019년 건국 대학교에서 다영역 수직이착륙기 관련 개념연구를 수행하였다[
66]. 2012년부터 한국항공우주연구원은 틸트로터형 수직이착륙기 및 틸트덕트형 수직이착륙기 관련 연구를 수행하였다[
38-
40]. 고정익 기반 형상변형드론 기술 중 분리/합체 기술 관련 기술개발 사례로 2020년 한국항공대학교는 고정익 유인기 모선과 자선 드론의 공중 분리/합체관련 기초연구를 수행하였다[
30]. 2023년 한국항공우주연구원은 무인기와 육상 모듈의 정밀 분리/합체 관련 육공 분리합체형 배송용 무인이동체 관련 개념연구를 수행하였다[
67]. 2022년 한국과학기술원은 비행 중 모선과 자선의 자동 공중급유를 위한 공중분리 및 재결합 장치 관련 연구를 수행하였다[
68].
국내 생체모방 기반 형상변형드론 기술개발 사례로 2020년 건국대학교는 장수풍뎅이 날개폄/접힘 구조에 따른 비행자세 안정성 분석 연구를 수행하였다[
48].
국내외 형상변형드론 관련 기술개발현황 조사 결과 각 세부 분야별 국내 기술 수준과 세계 최고의 국외 기술 수준 현황 비교는
Table 15과 같다. 기술 수준 평가 기준은 기술 성숙도(Technology Readiness Leve, lTRL)[
69]에 따라 수행되었으며 기초연구 수준(Basic Research Level)은 TRL 1-2단계 수준, 응용연구수준(Applied Research Level)은 TRL 3-4단계 수준, 시험개발수준(Test Development Level)은 TRL 5-6단계 수준에 대한 기준을 적용하여 분류하였다[
70].
Table 15The comparison of foreign country research level and domestic research level
Table 15
|
Type |
Foreign country |
Domestic |
Rotary wing based shape
shifting drone |
Self-shape shifting |
Applied research level |
Basic research level |
|
Separation/combining |
Most basic research level
(partially applied research level) |
Basic research level |
Fixed wing based shape
shifting drone |
Self-shape shifting |
Most applied research level
(partially test development level) |
Most applied research level
(partially basic research level) |
|
Separation/ combining |
Basic research level |
Basic research level |
Biomimetic wing based
shape shifting drone |
Self-shape shifting |
Most applied research level
(partially test development level) |
Basic research level |
|
Separation/ combining |
N/A |
N/A |
회전익 기반 형상변형드론 관련 자체 형상변형드론 중 단일영역(공중) 운용에서 세계 최고 기술 수준은 스위스 Voliro사와 취리히대학이 공동개발한 Omni-orientational Hexacopter[
51]로 판단되며, 다영역 운용에서 세계 최고 기술 수준은 공중비행과 지상주행이 가능하며 2020년 미 육군의 운용성 평가를 받은 미국의 Robotics Research사에서 개발한 Pegasus II [
11]로 판단된다. 이들의 기술 수준은 응용 연구 수준으로 판단되며, 그 외 나머지 조사된 연구 사례는 대부분이 대학연구실에서 수행된 기초연구 수준의 기술이라고 판단된다. 또한, 회전익 기반 형상변형드론 관련 분리/합체 기술분야도 대부분이 기초연구(Basic Research) 또는 개념연구 수준(Concept Research Level)으로 판단되며, 분리/합체 기술분야에서 세계 최고 기술 수준은 미국 NASA의 Shape-shifter [
21]로 판단된다.
고정익 기반 형상변형드론 중 자체 형상변형드론 관련 세계 최고기술수준은 분산전기추진장치 개념을 적용한 미국NASA의 GL-10 [
31]으로 판단되며, 독일의 Lillium Gmbh도 분산전기추진장치 개념을 적용한 Pheonix-2 [
53]를 개발하고 있고 프랑스의 Airbus 사도 틸트윙 비행체인 A3 Vahana [
36]를 개발하고 있다. 분리/합체 기술분야의 경우 고정익 드론 간의 직접적인 분리/합체를 통한 형상변형에 대한 사례는 확인되지 않았으나 2021년 미국 Florida Tech에서 고정익 모선 드론과 회전익 자선 드론의 공중분리 및 재결합에 대한 기술개발이 수행된 것으로 조사되었으며[
29] 기술 수준은 기초연구 수준을 추정된다.
생체모방 기반 형상변형드론 관련 세계 최고 기술 수준은 독일 Festo사에서 개발한 BionicFlyingFox [
44]와 BionicSwift [
45] 함께 미국 UIUC에서 개발한 BatBot [
43]으로 판단되며, 응용 연구 수준을 넘어서 일부 시험개발 수준(Test Development Level)에 도달한 것으로 추정된다. 그 외, 스위스 EPFL에서 개발한 Raptor [
13] 및 Perching Robot [
41]과 함께 미국 스탠포드 대학에서 개발한 SNAG [
42]도 궁극의 생체모방 기반 형상변형 드론 개발에 유용한 기술개발 사례로 판단된다.
상기 국외 기술개발현황과 달리 국내 형상변형드론 기술 수준은 고정익 기반 형상변형드론 기술[
38-
40]을 제외하고는 대부분 기초연구 수준에 머물고 있는 것으로 판단되었다.
형상변형드론의 국내외 기술개발사례 조사 및 분석을 통해 얻어진 형상변형드론의 기술트리(Technology Tree)는
Table 16와 같으며 기술트리 작성방법은 참고문헌[
1]의 기술트리 작성예시를 참고하였다.
Table 16의 기술트리는 회전익 기반 형상변형드론, 고정익 기반 형상변형드론 그리고 생체모방 기반 형상변형드론의 기술트리를 하나의 기술트리로 합쳐서 나타낸 표로 주석(Notes)란 R, F, B는 기술트리 내 각각의 핵심요소기술이 적용되는 형상변형드론의 종류를 나타낸다. 참고로 R은 회전익 기반 형상변형드론, F는 고정익 기반 형상변형드론, 그리고, B는 생체모방 기반 형상변형드론을 의미한다.
Table 16Core technologies for three kinds of shape shifting drone (Adapted from Ref. 6 on the basis of OA)
Table 16
|
System |
Core technology
(level 1)[6] |
Core element technology
(level 2) |
Core element technology
(level 3) |
Applied
drone |
|
Shape shifting drone |
(Tl) Shape shifting platform technology |
(Tl.l) Structure transform technology |
(Tl.1.1) Movability transform technology |
R, F |
|
(Tl.l.2) Airframe transform technology |
R, F |
|
(Tl.1.3) Thrust vector transform technology |
R, F |
|
(Tl.1.4) Wing/feather mimicked structure/driving technology |
B |
|
(Tl.l.5) Lifting force generating flapping technology |
B |
|
(T1.2) Separation/combining technology |
(T1.2.1) Safe separation/combining technology |
R, F |
|
(Tl.2.2) Multiagent integrated operation technology |
R, F |
|
(Tl.2.3) Multiagent integrated interface technology |
R, F |
|
(Tl .2.4) Light weight structure technology |
B |
|
(Tl.2.5) Graspable leg technology |
B |
|
(T2) Multiple shape control technology |
(T2.1) Reconfiguration/transition state control technology |
(T2.1.1) Shape shifting dynamic characteristic technology |
R, F, B |
|
(T2.1.2) Shape shifting posture stabilization technology |
R, F, B |
|
(T2.2) Control redistribution technology |
(T2.2.1) Real time control distribution technology |
R, F, B |
|
(T2.2.2) Shape modeling and identification technology |
R, F, B |
|
(T3) Mission operation technology |
(T3.1) Multidomain operation technology |
(T3.1.1) Multidomain optimal operation technology |
R, F, B |
|
(T3.1.2) Energy optimal operation technology |
R, F, B |
|
(T3.1.3) Mission performance extension technology |
R |
|
(T3.2) Mission planning technology |
(T3.2.1) Autonomous mission unit operation technology |
R, F, B |
|
(T3.2.2) Shape shifting operation planning technology |
R, F, B |
|
(T4) Sensor/actuator technology |
(T4.1) Sensor technology |
(T4.1.1) shape shifting recognition technology |
R, F, B |
|
(T4.1.2) Separation/combining sensor technology |
R, F |
|
(T4.1.3) Mission environment recognition technology |
R, F, B |
|
(T4.2) Actuator technology |
(T4.2.1) Transformed shape actuating technology |
R, F |
|
(T4.2.2) Separation/combining actuator technology |
R, F |
|
(T4.2.3) Biomimetic actuator technology |
B |
|
(T4.2.3) High degree of freedom distributed actuator technology |
R, B |
형상변형드론에 대한 세계 최고 기술 수준 대비 국내기술 수준은 2022년 국방 기술 진흥연구소가 구성한 12명의 산학연군 전문가 위원회에 의해 수행되었으며 세계 최고기술 보유국인 미국 대비 국내기술 수준은
Table 17와 같다[
5,
6].
Table 17로부터 형상변형드론에 대한 평균적인 국내기술수준은 세계 최고 기술 보유국인 미국 대비 66.2%, 기술격차는 3.5년이다[
6].
Table 17Domestic technology level relatively compared with the foreign country with the world best technology [5,6] (Adapted from Ref. 5, 6 on the basis of OA)
Table 17
|
|
Rotary wing base shape
shifting drone |
Fixed wing based shape
shifting drone |
Biomimetic shape
shifting drone |
Average |
|
Domestic technology level [%] |
66.6 |
67.7 |
64.4 |
66.2 |
|
Technological gap (year) |
3.5 |
3.3 |
3.7 |
3.5 |
|
Reference country (with the world best technology) |
USA |
USA |
USA, Germany |
USA |
4. 기술발전방향
회전익 기반 형상변형드론의 기술발전방향으로 운용영역(Operation Domain)의 다영역(Multi-domian)화로 기존 단일고정형상 드론은 비행성능 향상에 중점을 둔 반면에 회전익 기반 형상변형드론은 기구적 형상변형과 추력발생부의 형상변형 등을 통해 공중, 지상 및 수중 영역까지 그 운용 범위를 확대하는 방향으로 발전해 나갈 것으로 판단된다. 또한, 비행 플랫폼의 다중 스케일화로 소형단위 드론의 개체분리 및 합체를 통해 다양한 스케일의 플랫폼을 형성할 수 있는 형태로 발전해 나갈 것이라고 추정된다.
고정익 기반 형상변형드론의 경우 최근 신개념 추진비행방식인 분산전기추진장치가 적용된 드론들이 개발되고 있으며 향후 고정익 기반 형상변형드론의 대표적인 추진방식 중의 하나로 발전해 나갈 것으로 예상된다.
생체모방 기반 형상변형드론의 경우 기존 단일 고정형상 드론과 달리 비행 중 급기동 등을 위해 날개를 접거나 펴는 형상변형이 가능하며 건물이나 나무 위에 걸터앉기위해 걸터앉기용 다리를 드론에 부착하는 등 점차 조류 생체모방성이 보다 향상되는 방향으로 발전할 것으로 판단되며. 공중비행 중 수중 입수하여 유영하는 등의 다영역 운용이 가능한 형태로도 발전할 것으로 예상된다.
5. 결론
본 연구에서는 형상변형드론에 대해 국외 15개 국가에서 총 45건의 기술개발사례조사와 함께 국내기술 개발사례 총 14건을 조사하였다. 조사된 국내외 기술개발사례분석을 통해 고정익 기반 형상변형드론 관련 국내기술은 일부 응용 연구 수준에 도달한 반면에 회전익 기반 형상변형드론과 생체모방 기반 형상변형드론관련 국내 기술 수준은 대부분 기초연구 수준에 머물고 있는 것으로 조사되었다. 또한, 형상변형드론 관련 총 26개의 3 레벨 핵심 요소 기술을 식별하였으며, 형상변형드론 분류별 미래기술 발전 방향을 제시하였다. 본 연구결과는 향후 형상변형드론 관련 국내 기술개발 과제 발굴 및 기획에 있어 유용한 기초자료로 활용될 것이라고 생각된다.
REFERENCES
- 1.
- 2.
- 3.
- 4.
- 5.
- 6.
Baek, J. H., (2023), Current technology status and future development direction on shape shifting drone, Proceedings of the Korean Society for Precision Engineering 2023 Autumn Conference.
- 7.
- 8.
Hwang, D., Barron III, E. J., Haque, A. T., Baetlett, M. D., (2022), Shape morphing mechanical metamaterials through reversible plasticity, Science Robotics 7(63), eabg2171.
10.1126/scirobotics.abg2171
- 9. 10.12968/S2514-9768(23)90076-1
- 10.
- 11.
- 12.
- 13.
Ajanic, E., Feroskhan, M., Mintchev, S., Noca, F., Floreano, D., (2020), Bioinspired wing and tail morphing extends drone flight capabilities, Science Robotics, 5(47), eabc2897.
10.1126/scirobotics.abc2897
- 14.
Bucki, N., Mueller, M. W., (2019), Design and control of a passively morphing quadcopter, Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), 9116-9122.
10.1109/ICRA.2019.8794373
- 15.
Falanga, D., Kleber, K., Mintchev, S., Floreano, D., Scaramuzza, D., (2018), The foldable drone: A morphing quadrotor that can squeeze and fly, IEEE Robotics and Automation Letters, 4(2), 209-216.
10.1109/LRA.2018.2885575
- 16.
- 17.
Zhao, M., Anzai, T., Shi, F., Chen, X., Okada, K., Inaba, M., (2018), Design, modeling, and control of an aerial robot dragon: A dual-rotor-embedded multilink robot with the ability of multi-degree-of-freedom aerial transformation, IEEE Robotics and Automation Letters, 3(2), 1176-1183.
10.1109/LRA.2018.2793344
- 18.
Riviere, V., Manecy, A., Viollet, S., (2018), Agile robotic fliers: A morphing-based approach, Soft Robotics, 5(5), 541-553.
10.1089/soro.2017.0120
- 19.
- 20.
Sihite, E., Kalantari, A., Nemovi, R., Ramezani, A., Gharib, M., (2023), Multi-modal mobility morphobot (m4) with appendage repurposing for locomotion plasticity enhancement, Nature communications, 14(1), 3323.
10.1038/s41467-023-39018-y
- 21.
- 22.
Zhao, M., Anzai, T., Nishio, T., (2023), Design, modeling, and control of a quadruped robot spidar: Spherically vectorable and distributed rotors assisted air-ground quadruped robot, IEEE Robotics and Automation Letters, 8(7), 3923-3930.
10.1109/LRA.2023.3272285
- 23.
- 24.
- 25.
Liu, X., Dou, M., Huang, D., Gao, S., Yan, R., Wang, B., Cui, J., Ren, Q., Dou, L., Gao, Z., (2023), Tj-flyingfish: Design and implementation of an aerial-aquatic quadrotor with tiltable propulsion units, Proceedings of the 2023 IEEE International Conference on Robotics and Automation (ICRA), 7324-7330.
10.1109/ICRA48891.2023.10160899
- 26.
Paczan, N. M., Elzinga, M. J., Hsieh, R., Nguyen, L. K., (2016), Collective unmanned aerial vehicle configurations, US20160378108A1.
- 27.
- 28.
da Silva Ferreira, M. A., Begazo, M. F. T., Lopes, G. C., de Oliveira, A. F., Colombini, E. L., da Silva Simões, A., (2020), Drone reconfigurable architecture (dra): A multipurpose modular architecture for unmanned aerial vehicles (UAVs), Journal of Intelligent & Robotic Systems, 99(3), 517-534.
10.1007/s10846-019-01129-4
- 29.
Caruso, B., Fatakdawala, M., Patil, A., Chen, G., Wilde, M., (2021), Demonstration of in-flight docking between quadcopters and fixed-wing UAV, Proceedings of the 2021 IEEE Aerospace Conference (50100), 1-9.
10.1109/AERO50100.2021.9438229
- 30.
Bae, J., Park, S., (2022), Source technology development of a MidAir separation reintegration system for fixed wing parent and child UAVs, Proceedings of the SASE 2022 Fall Conference, TB6-1, 00320.
- 31.
- 32.
- 33.
D’Sa, R., Papanikolopoulos, N., (2019), Design and experiments for multi-section-transformable (mist)-UAV, Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), 1878-1883.
10.1109/ICRA.2019.8793575
- 34.
Rohr, D., Stastny, T., Verling, S., Siegwart, R., (2019), Attitude and cruise control of a VTOL tiltwing UAV, IEEE Robotics and Automation Letters, 4(3), 2683-2690.
10.1109/LRA.2019.2914340
- 35.
Verling, S., Weibel, B., Boosfeld, M., Alexis, K., Burri, M., Siegwart, R., (2016), Full attitude control of a VTOL tailsitter UAV, Proceedings of the 2016 IEEE international conference on robotics and automation (ICRA), 3006-3012.
10.1109/ICRA.2016.7487466
- 36.
- 37.
Wang, K., Ke, Y., Chen, B. M., (2017), Autonomous reconfigurable hybrid tail-sitter UAV u-lion, Science China Information Sciences, 60, 1-16.
10.1007/s11432-016-9002-x
- 38.
- 39.
- 40.
Korea Aerospace Research Institute, High-Speed Vertical Takeoff and Landing UAV. https://www2.kari.re.kr/eng/contents/138
- 41.
- 42.
Roderick, W. R., Cutkosky, M. R., Lentink, D., (2021), Bird-inspired dynamic grasping and perching in arboreal environments, Science Robotics, 6(61), eabj7562.
10.1126/scirobotics.abj7562
- 43.
Ramezani, A., Chung, S., Hutchinson, A., (2017), A biomimetic robotic platform to study flight specializations of bats, Science Robotics, 2(3).
10.1126/scirobotics.aal2505
- 44.
Hoff, J., Ramezani, A., Chung, S.-J., Hutchinson, S., (2017), Reducing versatile bat wing conformations to a 1-DoF machine, Biomimetic and Biohybrid Systems, 6, 181-192.
10.1007/978-3-319-63537-8_16
- 45.
- 46.
Siddall, R., Kennedy, G., Kovac, M., (2018), High-power propulsion strategies for aquatic take-off in robotics, Robotics Research, 1, 5-20.
10.1007/978-3-319-51532-8_1
- 47.
- 48.
Park, H., Phan, H., Lee, J., (2019), Tailless insect-mimicking flapping-wing micro air vehicle: A review and perspective, Journal of Institute of Control, Robotics and Systems, 25(11), 960-965.
10.5302/J.ICROS.2019.19.0171
- 49.
Avant, T., Lee, U., Katona, B., Morgansen, K., (2018), Dynamics, hover configurations, and rotor failure restabilization of a morphing quadrotor, Proceedings of the 2018 Annual American Control Conference (ACC), 4855-4862.
10.23919/ACC.2018.8431628
- 50.
- 51.
Kamel, M., Verling, S., Elkhatib, O., Sprecher, C., Wulkop, P., Taylor, Z., Siegwart, R., Gilitschenski, I., (2018), The voliro omniorientational hexacopter: An agile and maneuverable tiltable-rotor aerial vehicle, IEEE Robotics & Automation Magazine, 25(4), 34-44.
10.1109/MRA.2018.2866758
- 52.
- 53.
- 54.
Ajaj, R. M., Jankee, G. K., (2018), The transformer aircraft: A multimission unmanned aerial vehicle capable of symmetric and asymmetric span morphing, Aerospace Science and Technology, 76, 512-522.
10.1016/j.ast.2018.02.022
- 55.
De Petris, P., Nissov, M., Alexis, K., (2024), Morphy: A compliant and morphologically aware flying robot, Advanced Intelligent Systems, 2400493.
10.1002/aisy.202400493
- 56.
- 57.
- 58.
- 59.
Wilson, D. B., Göktogan, A., Sukkarieh, S., (2015), Guidance and navigation for uav airborne docking, Robotics: Science and Systems, 1-9.
10.15607/RSS.2015.XI.017
- 60.
Lee, J., Kim, Y., Koo, Y., Batool, J. Z., Park, Y., Kang, T., (2021), Development of variable life-saving drone, Proceedings of the 2021 Fall Conference and Annual General Meeting of the KIEE Industrial Applications Society, 117-119.
- 61.
Lee, S. H., (2017), Propeller allocation re-configurable drone, KR101766031B1.
- 62.
Kim, S.-J., Lee, D.-Y., Jung, G.-P., Cho, K.-J., (2018), An origamiin-spired, self-locking robotic arm that can be folded flat, Science Robotics, 3(16), eaar2915.
10.1126/scirobotics.aar2915
- 63.
- 64.
Kim, H., Jung, S., (2018), Balancing and driving control of a combined system of a two-wheeled mobile robot and a drone by connector design, JICROS, 24(4), 309-314.
10.5302/J.ICROS.2018.17.0202
- 65.
Song J., (2016), Flight system of mother-baby unmanned aerial vehicle using magnetic force, KR101668639B1
- 66.
- 67.
Jeong, J., Ko, D., Won, D., (2023), Flight control system design for docking-undocking unmanned vehicles for delivery service, Proceedings of the 2023 Spring Conference of the Society for Aerospace System Engineering, 569-571.
- 68.
Choi, A. J., Park, J., Han, J. H., (2022), Automated aerial docking system using vision-based deep learning, Proceedings of the AIAA Science and Technology Forum and Exposition, AIAA SciTech Forum 2022, AIAA 2022-0883.
10.2514/6.2022-0883
- 69.
- 70.
Jeong, H., Jeong, T., Kim, J., Baek, Y., Jeon, Y., (2022), Evaluation of technology level of MUM-T system, (KRIT Issue paper No. 22-5).
https://www.krit.re.kr/krit/bbs/brief1_pdf.do?bbsId=brief1&article_category=&nttId=4816&page=2&searchCnd=0&searchWrd=&startd=&endd=&menu_no=03040000
Biography
- Joo Hyun Baek
Ph.D./Division Director in the Division of Science and Technology Promotion, Chungnam Institute. His research interest is the research policy and program planning, and the evaluation of science technology level on unmanned system including MUM-T