ABSTRACT
Ceiling inspections present challenges due to limited accessibility and structural constraints. To ease the burden on security personnel, who would otherwise need to manually disassemble, inspect, and restore ceiling components, this study proposes a robotic system for detecting hazardous objects within ceiling environments. The proposed system features several key innovations: a hollow-structured track mechanism designed to reduce vibrations from jolting while traversing structural beams and to improve localization accuracy. We optimized the robot's mass distribution and required drive torque through dynamic simulations to ensure stable mobility in confined ceiling spaces. For effective hazardous object detection, we developed a YOLOv8-Seg-based background learning algorithm that suppresses ceiling-structure patterns, allowing for the identification of unknown objects without prior class-specific training. Additionally, we introduced a frame-based filtering algorithm to enhance detection reliability by reducing false positives caused by motion blur during movement. The system's effectiveness was validated through experiments conducted in a ceiling-structured testbed, demonstrating its capability for accurate hazardous object detection under realistic operating conditions.
-
KEYWORDS: Hazardous object detection (위험물 탐지), Search robot (탐색 로봇), Anti-terror security inspections (대테러 보안 점검)
1. 서론
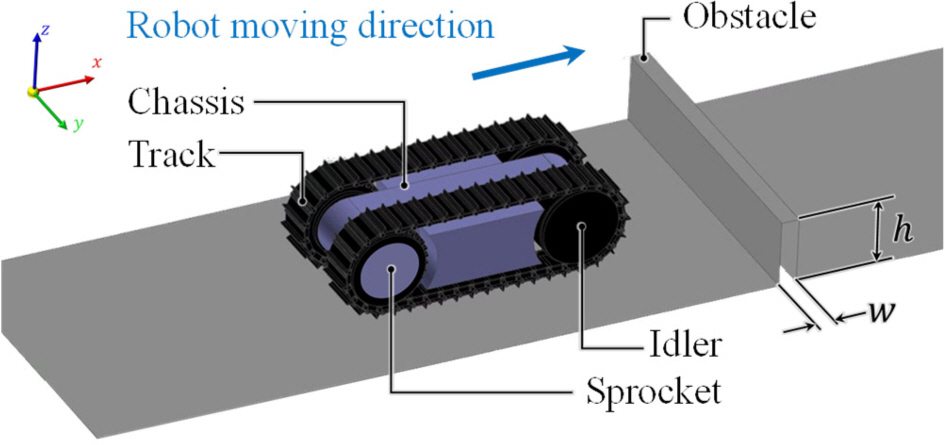
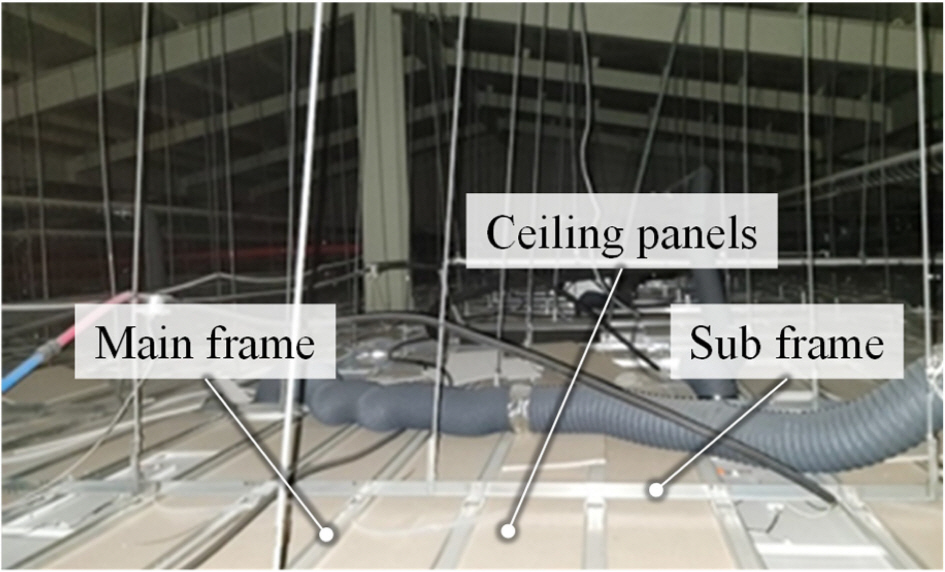
경호팀에서는 경호 대상자가 도착하기 전에 사제 폭발물, 시한 폭탄 등이 설치되어 있는지를 방바닥부터 천장까지 순차적으로 수색하는데 천장 수색이 가장 어렵다. 천장은 협소하여 사람의 접근이 어려워 보안 사각지대로 남는 경우가 많으며, 이로 인해 위험물 은닉에 악용될 가능성이 높다. 현재 경호 요원들은 높은 곳에 있는 천장을 뜯어 수색하고 안전이 확인되면 다시 복구하고 있는데 이는 많은 시간과 비용을 수반한다. 천장 공간은 협소하며 최대 75 mm 높이의 장애물, 케이블, 배관 등이 밀집되어 있다. 이러한 요소들은 경량 철골(M-바) 구조와 천장판으로 구성된 내부에 배치되어 있다(
Fig. 1). 본 논문에서는 천장 내부와 같은 협소한 환경에서의 장애물 극복 및 위험물 탐지가 가능한 로봇 시스템을 제안한다.
Fig. 1Narrow-space environment (M-bar ceiling system)
협소 공간 탐색을 위해 기존에 제안된 로봇으로는 뱀형 로봇, 덩굴 로봇 등이 있다. 뱀형 로봇은 유연한 구조를 바탕으로 좁고 복잡한 공간에서의 기동성이 우수하여 곡선이나 분기 구조가 많은 배관 내 탐색에 적합하다[
1,
2]. 그러나 뱀형 로봇은 유선(Tether)으로 구동되기 때문에 운용 범위가 제한적이며 기둥을 돌다가 케이블에 매듭이 생기면 풀기가 어렵다. 덩굴 로봇은 공기압을 기반으로 한 유연한 튜브 형태로 구성되어 협소한 공간 접근성과 장애물 회피 성능이 뛰어나지만, 내구성이 낮고, 길이가 길 어질수록 이동 속도가 저하되며 방향 제어가 어렵다[
3-
5]. 따라서 상술한 로봇들은 천장환경에서 사용하기에 적합하지 않다.
천장 환경에서 사용하려는 로봇은 천장판이 버틸 수 있는 하중인 5 kg 이내를 만족해야 하며, 70 mm 정도의 철골 구조물을 넘을 수 있어야 하고, 천장 환경 내에서 이동하며 지도를 생성하고 의심스러운 물체가 있으면 지도에 그 물체의 위치를 표시해야 한다. 본 논문에서는 이러한 요구사항을 만족하기 위해 다음과 같은 방법을 사용하였다. (1) 로봇이 철골 구조물을 넘을 때 발생하는 충격에 의한 진동을 줄이고 위치 인식 정확도를 향상시키기 위해 트랙 시스템에 중공(Hollow) 구조를 도입하였고, 장애물 극복 성능 향상을 위한 러그(Lug) 형상을 설계하였다. 로봇의 무게와 구동 토크는 동역학 시뮬레이션을 통해 설계 사양을 도출하였다. 로봇이 안정적으로 동작하고 장애물을 효과적으로 극복할 수 있도록, 해석을 통해 질량 중심의 적정한 위치를 도출하였다. (2) 효과적인 위험물 탐지를 위해, YOLOv8-Seg 기반 배경 학습 기법을 개발하여 천장 구조 패턴을 배제하고 사전 클래스 학습 없이 미지의 물체를 탐지할 수 있게 하였다. (3) 모션 블러에 의해 발생하는 오탐을 줄이기 위해 프레임 기반 필터링 알고리즘을 적용하였다.
위험물 탐지를 위해 인공지능(AI) 기반 객체 탐지 기술이 활용될 수 있으나, 객체 탐지 AI 모델은 인식하려는 객체에 대해 대규모 학습 데이터를 미리 구축해야 한다는 한계를 갖는다 [
6,
7]. 본 연구에서는 이러한 문제를 극복하기 위해, 사전 정의된 객체 대신 배경을 학습하여 이를 제거한 후, 잔여 이미지 영역을 위험 요소로 판단하는 방식의 알고리즘을 제안한다. 해당 접 근법은 학습 데이터에 대한 의존성을 낮추고, 다양한 환경에서 일반화된 위험물 탐지 성능을 확보할 수 있다. 제안한 로봇을 실제 천장 구조를 모사한 테스트베드에서 실험하여 효과적으로 위험물을 탐지할 수 있음을 검증하였다.
본 논문은 다음과 같이 구성되었다. 2장에서는 로봇 플랫폼의 설계 방안을 소개하고, 3장에서 천장 장애물 극복 실험 결과를 소개한다. 4장에서는 천장 위험물 인식을 위한 알고리즘과 천장환경을 모사한 테스트베드 실험 결과를 소개한다. 마지막으로 5장에서는 본 논문의 결론과 향후 계획을 서술한다.
2. 제안하는 로봇 플랫폼
2.1 천장 환경 특성
천장 환경은
Fig. 1과 같이 좁고 복잡한 구조로 인해 내부 탐색과 보안 점검에 어려움이 많다. 특히 철골 부재, 전선, 배관 등 다양한 구조물과 장애물이 혼재된 천장 환경은 로봇의 장애물 극복 높이, 회전반경, 크기 등 운용에 제약을 발생시킨다.
상업용 건물과 공공시설에 널리 사용되는 경량 철골 천장 시스템은 주 골조, 보조 골조, 천장 패널, 연결 부품으로 구성되며, 골조의 형상과 배치에 따라 M-bar, Chip-bar, T&H-bar 구조 등으로 구분된다[
8]. 본 연구에서는 로봇 운용 천장 환경으로 M-bar 구조를 선정하였다.
M-bar 구조에서 주 골조는 17-20 mm, 보조 골조는 주 골조 위에 20-50 mm높이로 설치되며, 로봇이 극복해야 할 최대 단차 높이는 주 골조와 보조 골조의 높이를 합한 70 mm이다. 또한, 일반적인 천장 패널의 크기가 300 × 600 mm임을 고려할 때, 로봇이 골조 간섭 없이 회전할 수 있는 최소 공간은 300 ×300 mm이며, M-bar 주 골조 최소 폭 38 mm를 고려한 로봇 구 동부 설계가 필요하다.
2.2 장애물 극복을 위한 로봇 동역학 해석
로봇은 천장 환경 내 최대 70 mm 높이의 단차를 극복할 수 있어야 한다. 이를 위해 질량 중심의 위치를 설계 변수로 설정 하였는데 질량 중심의 위치는 로봇의 외부 형상을 유지하면서 배터리, 구동 모터 등 내부 구성품의 배치를 통해 조정할 수 있다. 장애물 극복 과정에서 로봇 플랫폼의 질량 중심이 장애물의 최상단을 통과하면 안정적으로 극복할 수 있다. 하지만, 이를 넘지 못하는 경우에는 전복이 발생한다[
9,
10].
로봇의 질량 중심에 따른 장애물 극복 가능 여부를 확인하고 적절한 질량 중심 위치를 도출하고자 동역학 해석을 수행하였다. 또한, 해석 결과를 통해서 장애물 극복에 필요한 모터의 구동 토크를 도출하였다.
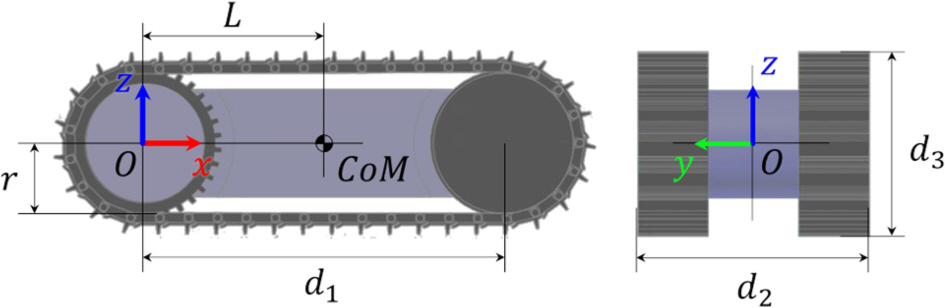
동역학 해석 도구로는 RecurDyn을 활용하였으며, 궤도형 이동 로봇의 주행을 구현하기 위해 TrackLM 툴킷을 적용하였다. 해석을 위해, 로봇 플랫폼은 Fig.2와 같이 차체, 궤도, 아이들러, 스프로켓으로 구성하였고, 천장 환경 내 골조 구조를 반영하여 높이(h) 70 mm, 폭(w) 20 mm의 장애물이 있는 천장 환경으로 모델링하였다. 또한, 로봇의 무게는 4.35kg, 주행 속도는 0.3m/s로 설정하였다.
Fig. 2Robot platform and simulation environment model
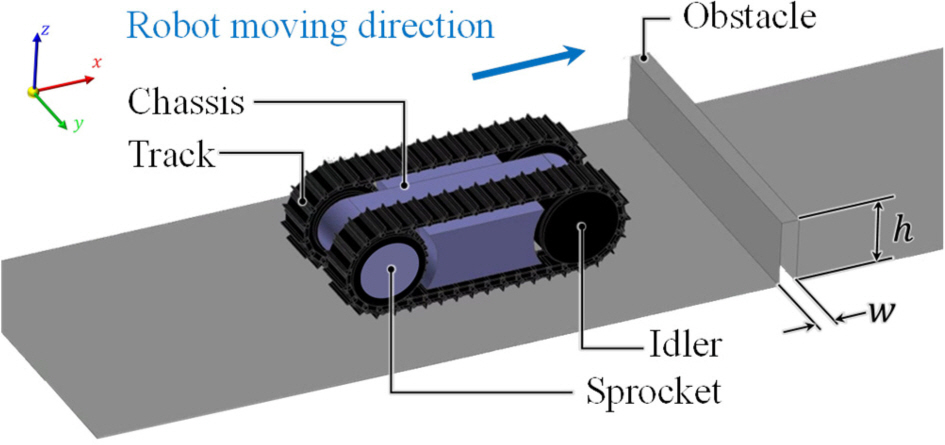
Fig. 3과 같이 질량 중심(
CoM)의 위치는 스프로켓 중심(
O)로부터 x축 방향으로 거리(
L) 만큼 떨어진 지점을 의미한다. 장애물 극복이 가능한 로봇의 질량 중심(
CoM) 위치를 도출하기 위해, 휠 베이스(Wheel base,
d1) 범위 내에서 거리(
L)를 다양하게 변화시키며 반복적인 해석을 수행하였다. 또한,
d2는 로봇의 폭,
d3는 로봇의 높이를 나타내며, 이에 대한 상세한 값은
Table 1에서 확인할 수 있다.
Fig. 3Geometric parameters and center of mass of the robot
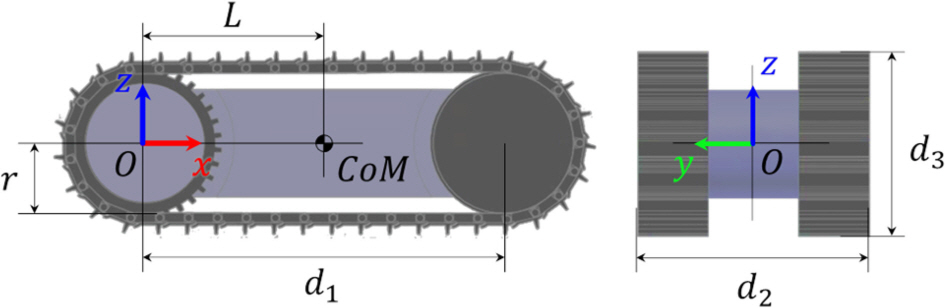
Table 1Geometric model parameters
Table 1
|
Parameter |
Symbol |
Length [mm] |
|
Obstacle height |
h
|
70 |
|
Wheel radius |
r
|
44 |
|
Wheel base |
d1
|
220 |
|
Track width |
d2
|
138 |
|
Platform height |
d3
|
113 |
해석 결과는
Figs. 4(a) 및
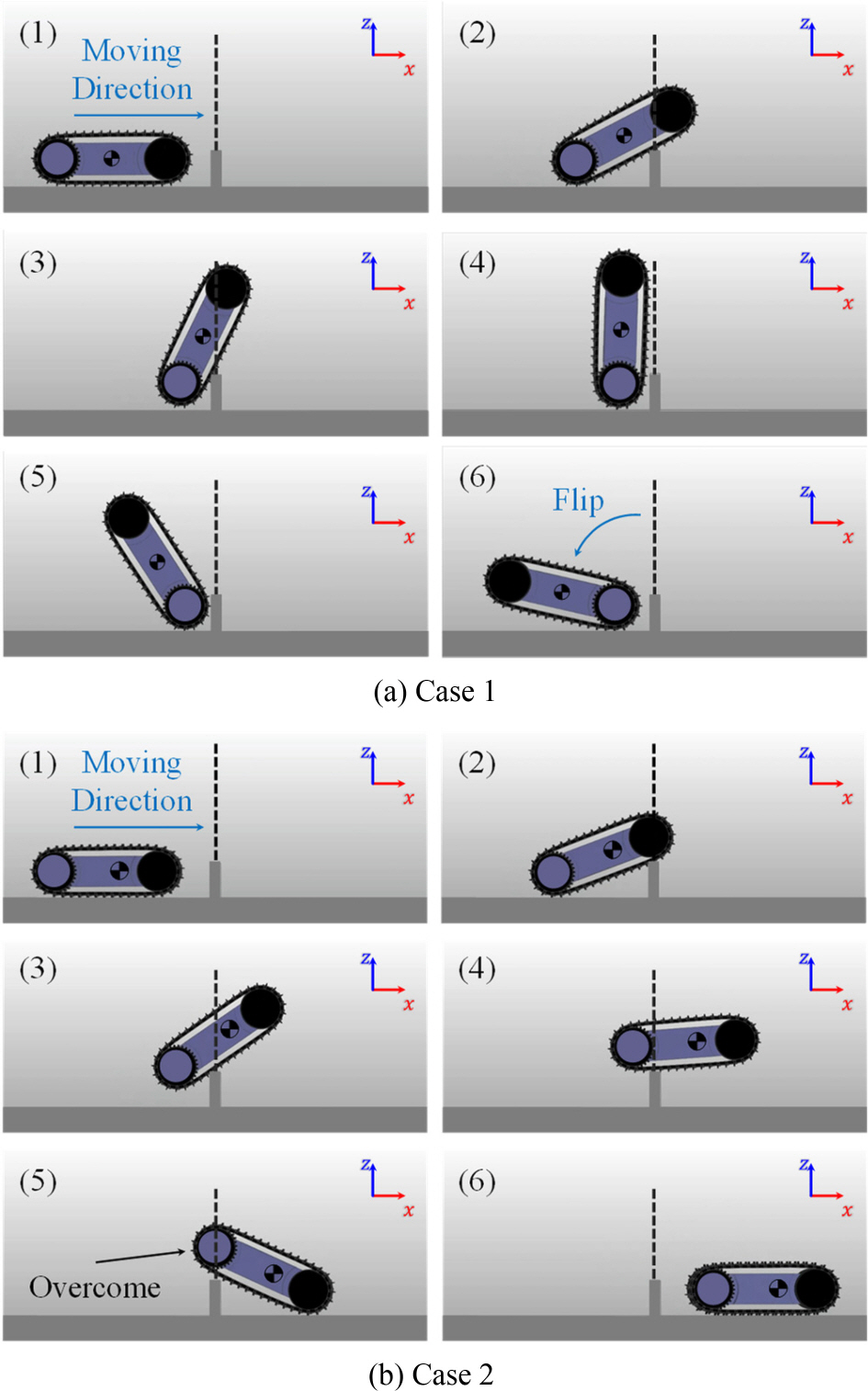
4(b) 대표적으로 두 가지 경우(Case)다. Case 1에서는 거리
L이 69 mm로, 질량 중심이 로봇 플랫폼 중앙에 위치하며, Case 2에서는 거리
L이 91 mm로, 질량 중심이 로봇 플랫폼의 전방에 위치한다.
Fig. 4Obstacle overcoming simulation results
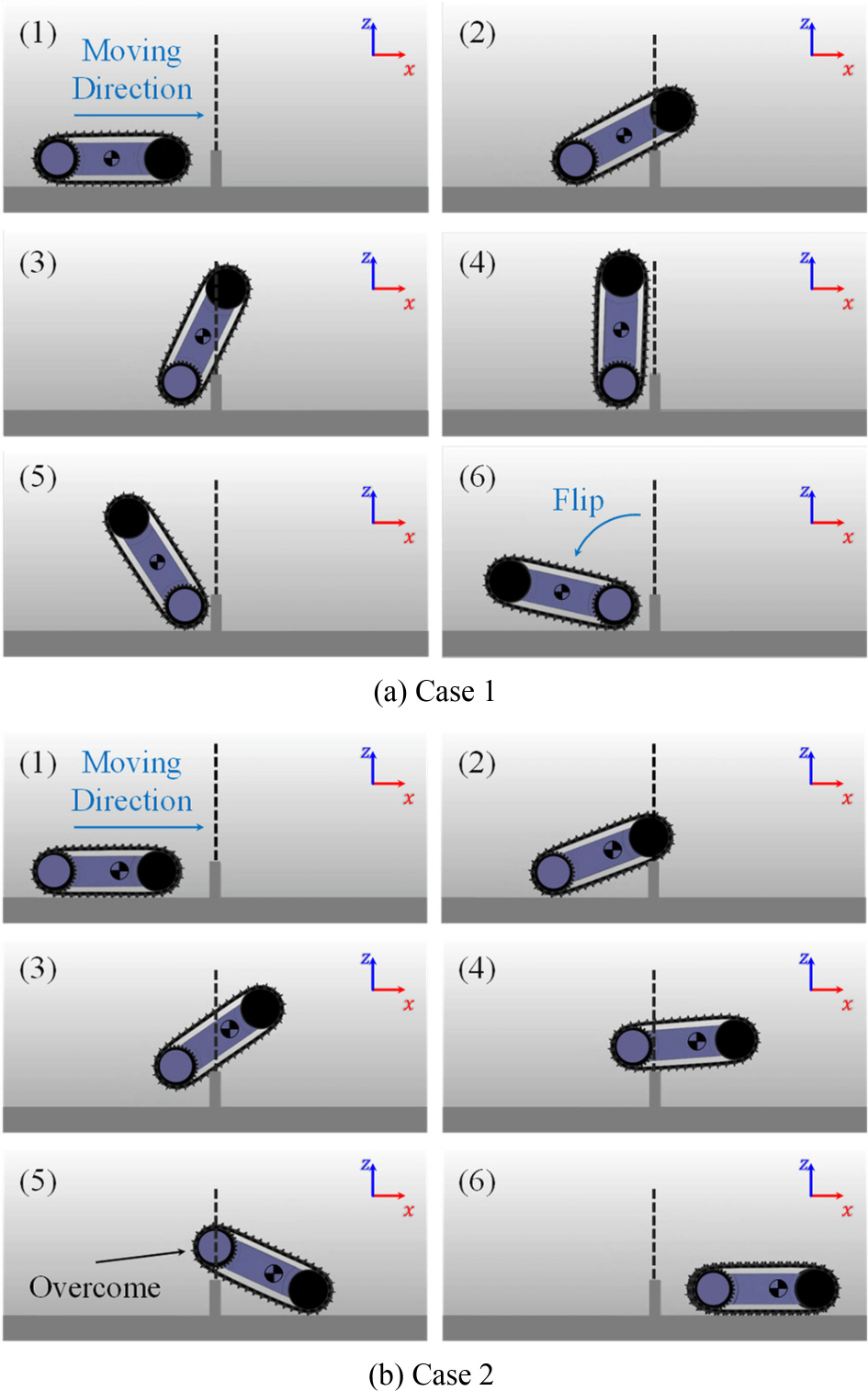
Fig. 4(a)에서 확인할 수 있듯이, Case 1에서는 질량 중심이 장애물의 최상단을 통과하지 못해 로봇이 전복되는 결과를 나타낸다. 반면,
Fig. 4(b)와 같이 질량 중심이 전방에 위치할 경우, 질량 중심이 장애물의 최상단을 통과하면서, 결과적으로 장애물을 성공적으로 극복할 수 있음을 확인하였다.
해석 결과, 질량 중심 위치가 장애물 극복 성능에 큰 영향을 미친다는 점을 확인할 수 있었다. 특히, 질량 중심이 로봇 플랫폼의 전방으로 이동할수록 장애물 극복에 대한 안정성이 향상됨을 확인할 수 있었다. 그러나 질량 중심이 지나치게 전방에 위치할 경우에는 로봇의 후방 트랙에 가해지는 접지력이 감소하여 구동력 손실이 발생할 수 있고, 이로 인해 주행 안정성이 저하될 가능성이 있다. 따라서, 장애물 극복 성능뿐만 아니라 일반적인 주행 성능까지 종합적으로 고려한 균형 잡힌 질량 중심 배치가 필요하다. 본 연구에서는 이런 점을 고려하여 로봇 질량 중심 위치를 적절하게 선정하고 모터 구동 토크를 동역학 해석을 통해 분석하였다.
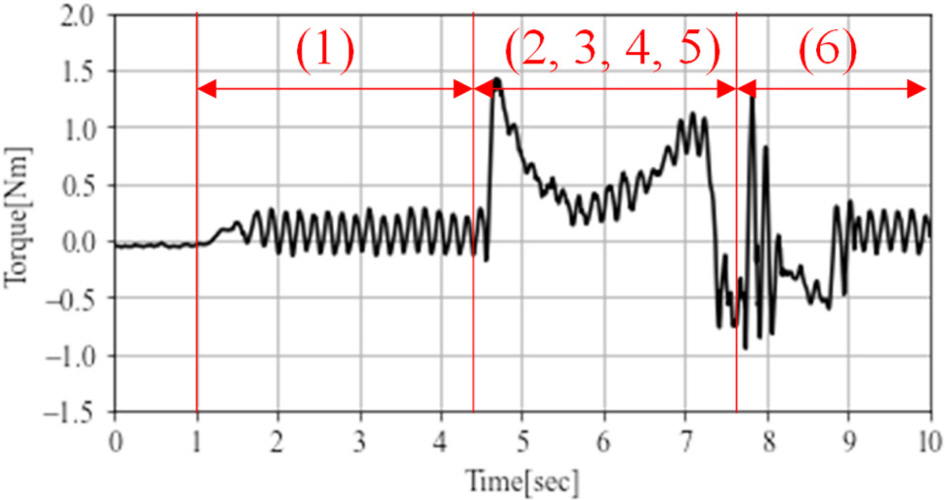
Fig. 5의 그래프는 시간에 따른 로봇 모터의 구동 토크 변화를 나타내며, 로봇이 주행하고 장애물을 극복하는 동안의 단계별 토크 변화를 보여준다. 각 구간은
Fig. 4(b) 의 (1), (2)-(5), (6)과 대응되며, 주요 내용은 다음과 같다.
Fig. 5Drive torque in obstacle overcoming simulation
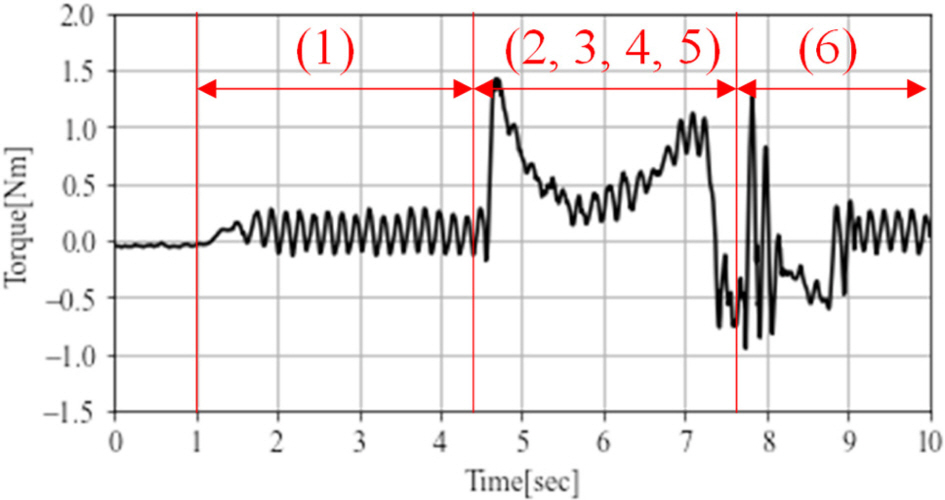
(1) 구간(0-4 sec): 로봇이 평지에서 최고 속도 0.3m/s로 주행하는 동안, 평균 토크는 약 0.06 Nm로 나타났으며, 토크의 진폭은 최대 0.4 Nm로 확인되었다.
(2)-(5) 구간(4-7 sec): 로봇이 장애물에 접근하고 이를 극복하는 과정으로, 장애물을 넘기 위해 요구되는 구동 토크가 급격히 증가하여 최대 1.5 Nm까지 상승하는 것으로 나타났다.
(6) 구간(7-10 sec): 로봇이 장애물을 극복한 후, 바닥과 충돌하며 평지 주행으로 전환되는 구간으로, 이 과정에서 순간적으로 큰 충격이 발생하여 모터에 약 1.3 Nm의 일시적인 부하가 가해지는 것으로 확인되었다.
이처럼 장애물 극복 과정에서 요구되는 로봇의 토크 변화 특성을 파악하였다. 특히 장애물 극복 시 순간적으로 높은 토크가 필요함을 확인하고 충분한 토크 여유를 확보할 수 있는 모터를 선정하였다.
2.3 로봇 하드웨어 플랫폼 설계
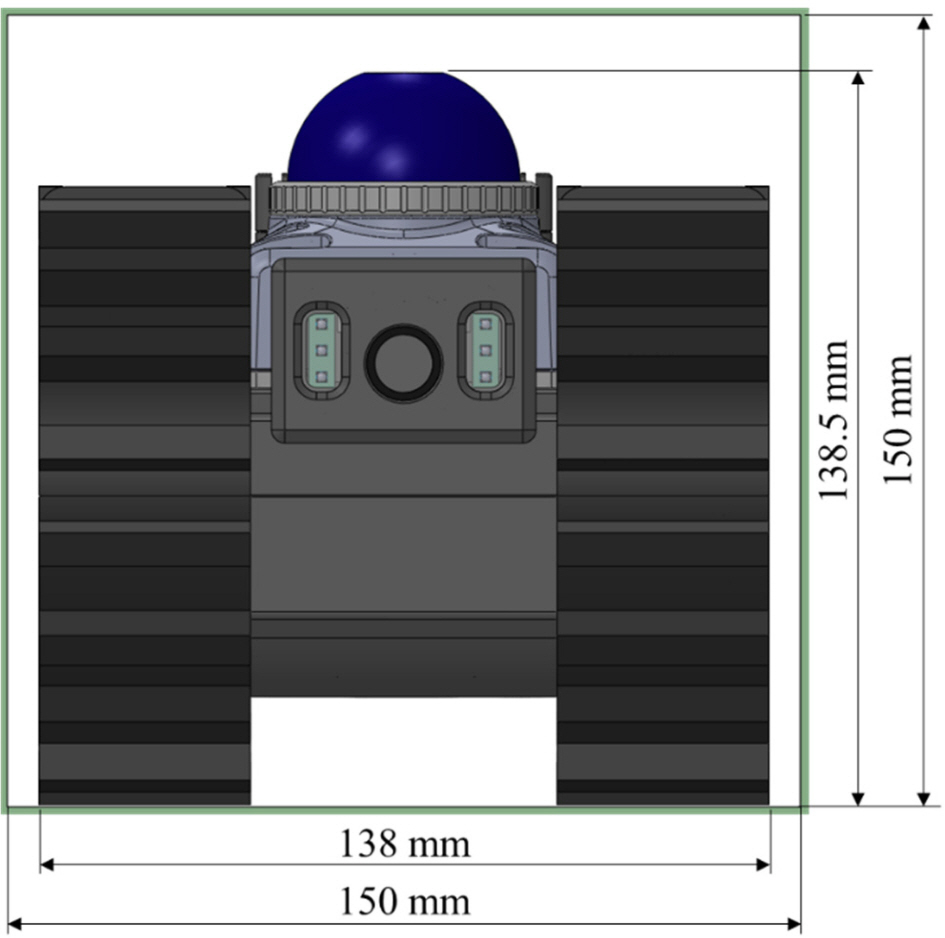
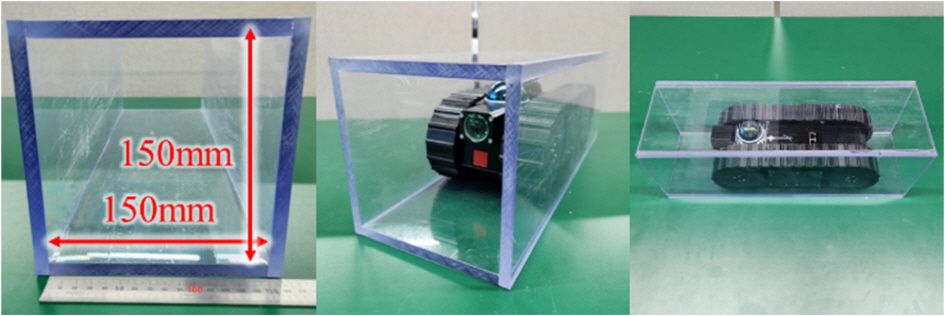
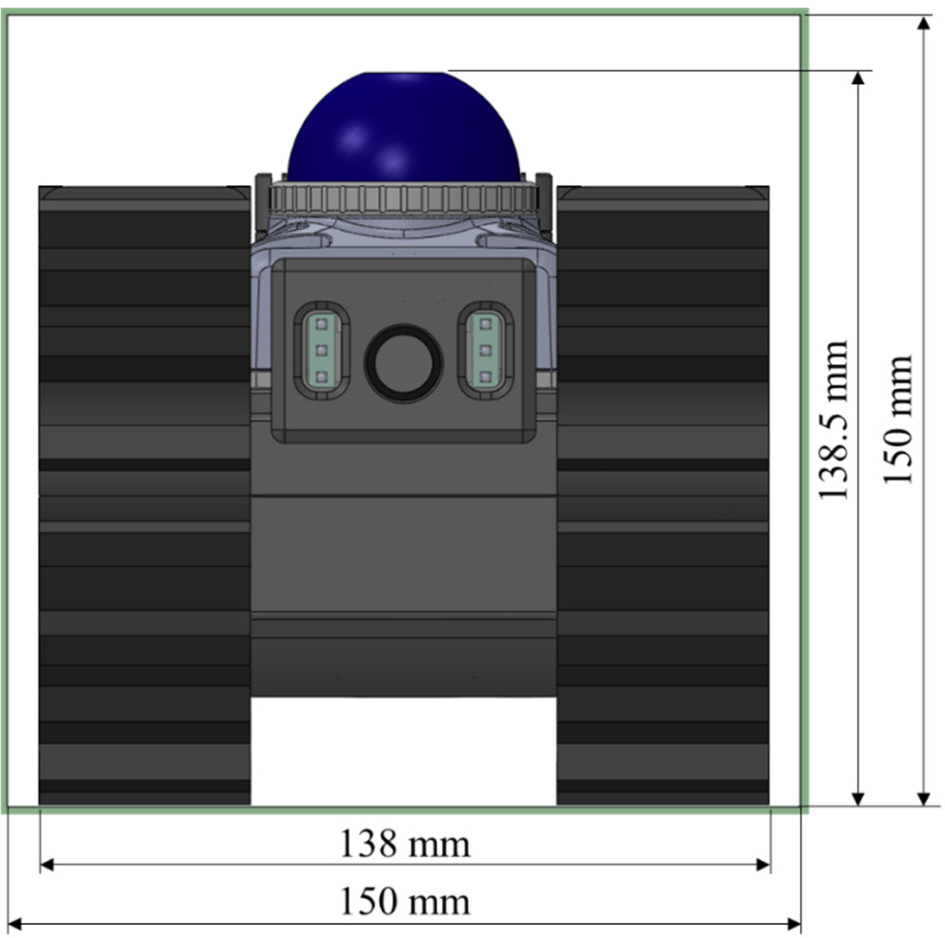
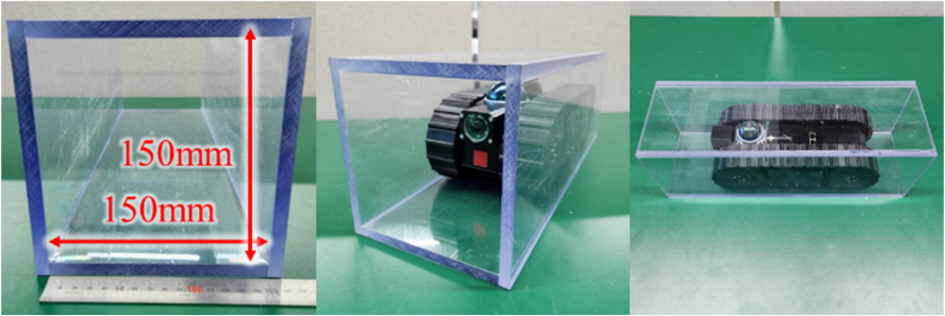
천장을 점검하기 위해 환풍구, 석고 타일 등을 투입구로 활용한다. 이를 고려하여 개발된 로봇의 통과 가능한 최소 단면 크기는 150 × 150 mm로 설정하였다(
Fig. 6). 천장 환경에서는 주행 시 17 mm에서 최대 70 mm의 단차를 극복해야 한다. 트랙형 구동부는 바퀴 기반 구동부보다 넓은 접지 면적으로 높은 마찰력을 제공하여 미끄러짐을 방지하고, 안정적인 장애물 극복을 가능하게 한다. 트랙은 장애물을 만났을 때 구동력이 일정하게 유지하며 장벽을 타고 넘는 방식으로 장애물을 극복할 수 있어, 협소하고 불규칙한 천장 공간에서도 안정적인 주행이 가능하다.
Fig. 6Robot size for limited cross-sectional entry
로봇이 평지 주행과 장애물 극복을 할 수 있게 하기 위해 필요한 트랙형 구동부 토크는 평지에서 최대 0.4 Nm, 장애물 극복 시 1.5 Nm이다. 이러한 사양을 만족하기 위해 모터와 기어를 다음과 같이 선정하였다. 모터는 MAXON의 ECX FLAT 32S (50 W, 24 V) 모델로, 주요 사양은
Table 2에 요약되어 있다. 이 모터는 고성능을 제공하면서도 로봇의 소형 설계에도 적합하다. 모터와 결합된 기어박스는 GPX32 모델이며, 이 조합은 장애물 극복 시 필요한 1.5 Nm의 토크를 충분히 제공하며, 최대 출력 시 2.5 Nm까지 도달할 수 있어 요구사항을 만족한다.
Table 2Specifications of the selected motor
Table 2
|
Motor: ECX FLAT 32S (50 W, 24 V) |
|
Nominal speed [rpm] |
10,000 |
|
Nominal torque [Nm] |
0.0478 |
|
Max. torque [Nm] |
0.0914 |
|
Current [A] |
3.04 |
|
Size [mm] |
Ø32 × 17.5 |
|
Gear: GPX32 |
|
Gear ratio |
35 : 1 |
|
Efficiency [%] |
78 |
|
Combined output |
|
Nominal speed [rpm] |
285.7 |
|
Nominal torque [Nm] |
1.3 |
|
Max. torque [Nm] |
2.5 |
장애물을 넘는 과정에서 전복 방지를 위해 로봇 내부 부품 배치를 최적화하였다. 동역학 해석을 통해 스프로켓 중심과 질량 중심간 거리 L을 91 mm로 설정하였다. 이러한 동역학 해석 기반 설계 방식으로 실제 제작 없이도 목표 성능을 만족할 수 있는 구조를 도출할 수 있었다.
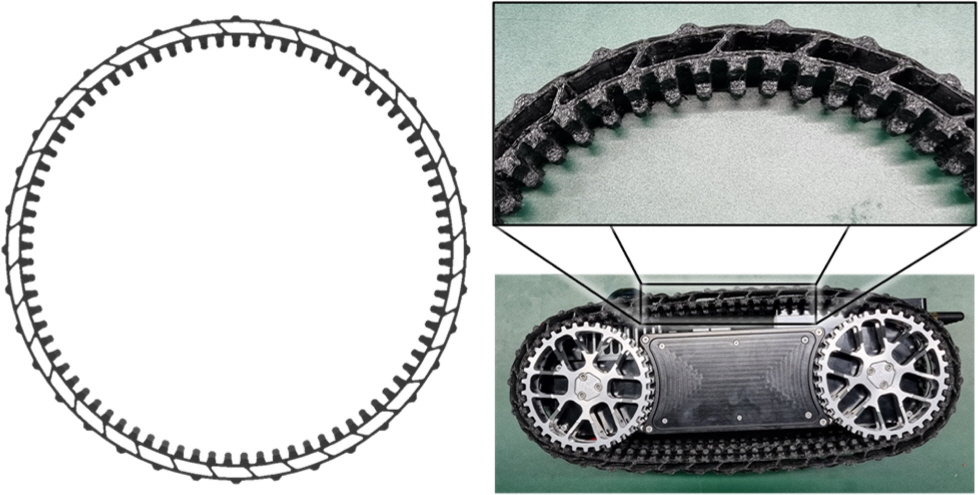
구동부 트랙을 설계할 때 로봇 크기 제약과 탑재 용량을 고려하여 트랙 폭, 바퀴 크기, 돌기의 형상과 간격, 충격 흡수 구조 등을 종합적으로 최적화하였다. 먼저 트랙 폭은 석고보드 고정용 M-bar 시스템의 클립에 끼이지 않도록 최소 40 mm 이상으로 설정하였다. 바퀴 크기는 장애물 극복 성능을 높이기 위해 클 수록 유리하지만, 로봇 상단에 위치한 LiDAR (Light Detection And Ranging) 센서의 시야(Field of view)를 방해하지 않는 범위 내에서 결정해야 한다. 본 연구에서는 바퀴의 직경을 120 mm로 하여 장애물 극복 성능을 확보하면서도 센서 시야에 영향을 미치지 않도록 설계하였다.
트랙의 설계, 돌기의 형상과 실제 제작한 트랙 실물 사진을
Fig. 7에 도시하였다. 다양한 장애물 환경에서 실제 실험을 수차례 실시하여 트랙의 돌기 형상과 간격에 대한 최적 값을 찾을 수 있었으며, 그 결과 접지 성능과 장애물 극복 성능을 향상하였다. 장애물을 넘은 후 로봇의 앞부분이 지면에 떨어지면서 발생하는 충격을 완화하기 위해 트랙 사이에 빈 공간을 추가함으 로써 주행 안정성과 로봇 위치 추정 정확도를 높였다. 이렇게 개선한 로봇이 70 mm 높이의 장애물을 안정적으로 극복할 수 있음을 확인하였다(
Fig. 8).
Fig. 7Design and fabrication of the tracked drive system
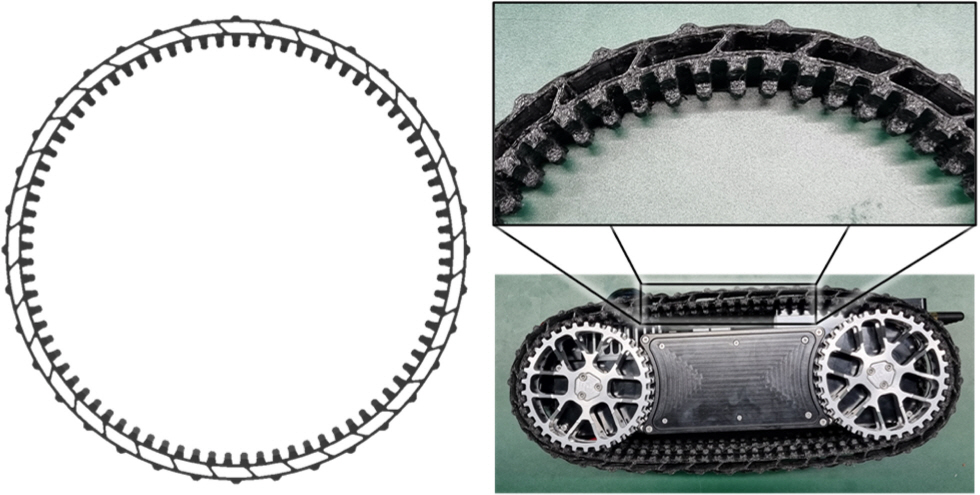
Fig. 8Obstacle overcoming test of the developed robot

2.4 전장 설계
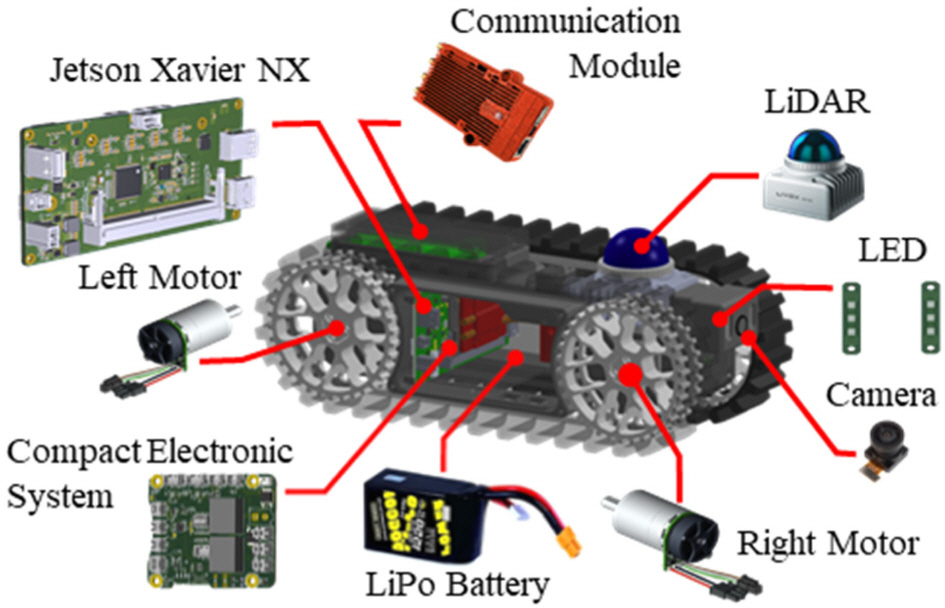
천장 탐색 로봇 전장 시스템의 구성은
Fig. 9와 같다. 전장 시스템은 고성능 연산과 실시간 제어를 수행할 수 있으며 위험물 탐지와 원격 조종 기능을 지원한다.
Fig. 9System configuration of the narrow-space exploration robot
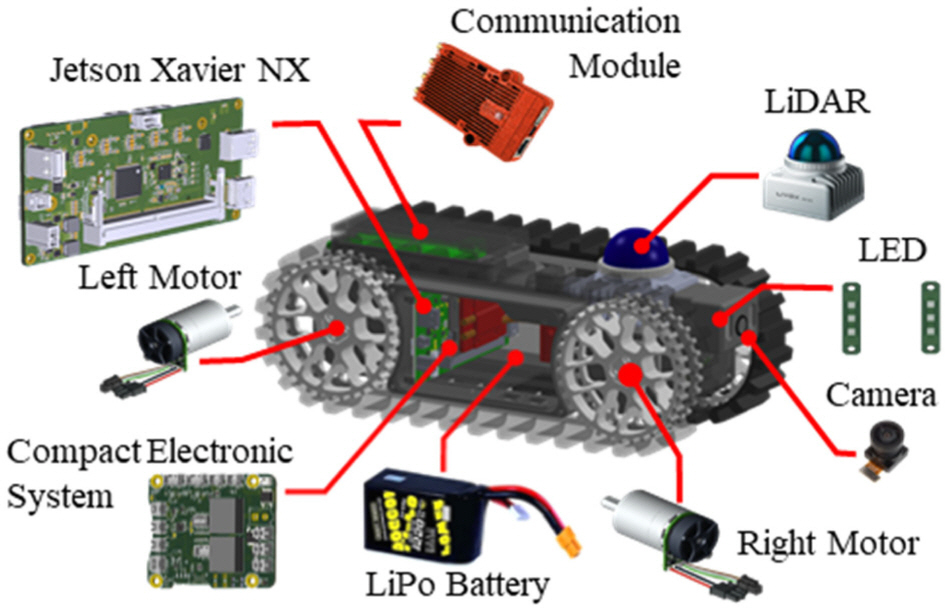
고성능 연산이 요구되는 작업과 기본적인 제어 기능을 효율적으로 분담하기 위해, 전장 구조는 상위 제어기와 하위 제어기로 구분하였다. 위험물 탐지 알고리즘과 같이 고속 연산이 필요한 기능은 상위 제어기(Jetson Xavier NX)에서 처리하고, 모터 제어, 전원 관리, RF (Radio Frequency) 통신 등 실시간성이 요구되는 제어 기능은 하위 제어기(STM32)를 통해 수행함으로써 연산 효율성과 제어 성능을 극대화하였다.
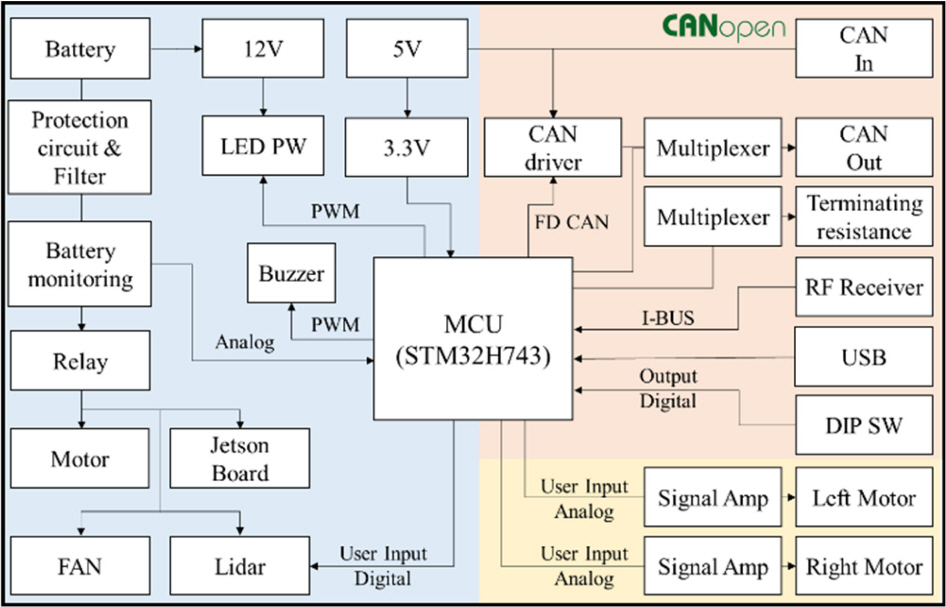
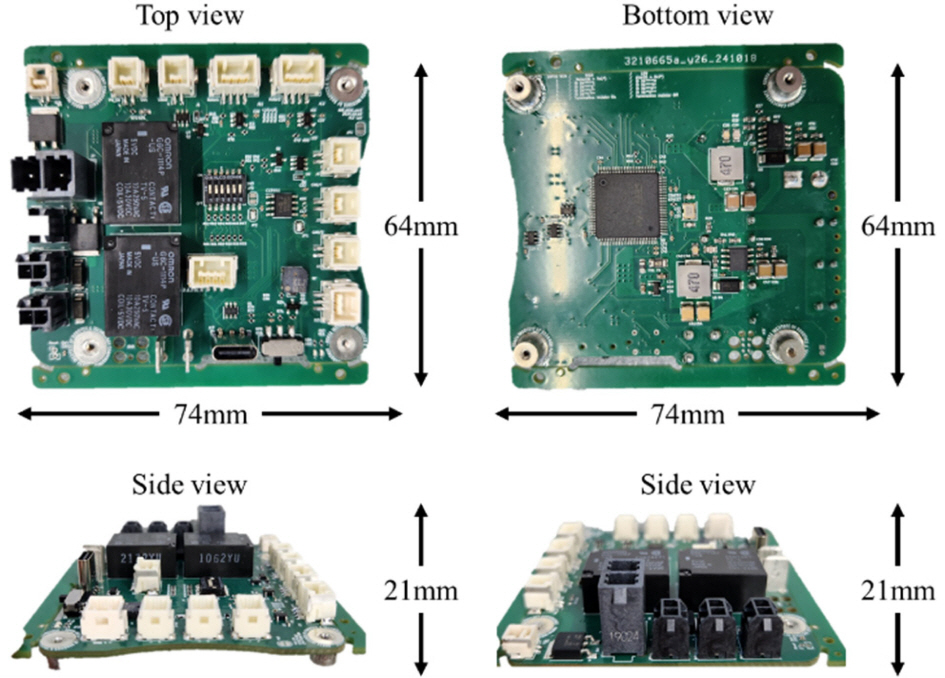
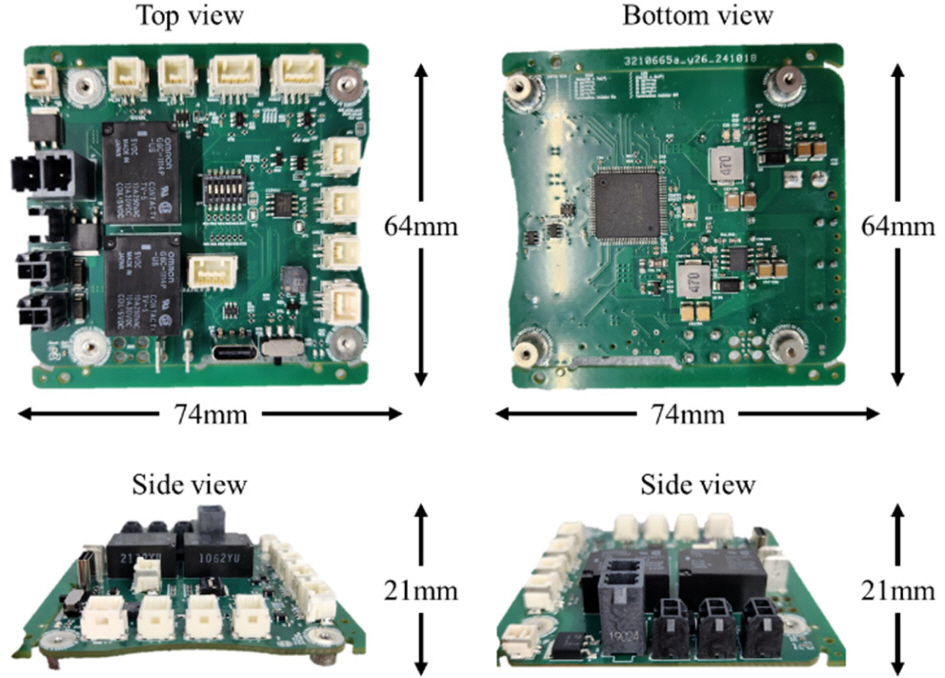
하위 제어기는
Fig. 10과 같이 STM32H7 시리즈 MCU (Micro Controller Unit)를 기반으로 설계되었으며, GPIO (General Purpose Input Output), ADC (Analog-to-Digital Converter), DAC (Digital-to-Analog Converter), CAN FD (Controller Area Network Flexible Data-rate), UART (Universal Asynchronous Receiver Transmitter) 등의 인터페이스를 활용하여 모터 및 센서를 실시간으로 제어한다. 모터 제어, CANopen 프로토콜, RF 통신, 센서 전원 관리, 전원 보호 기능 등을 통합하여
Fig. 11과 같이 가로 74 mm, 세로 64 mm, 높이 21 mm의 소형 단일 보드 형태로 구현하였으며, 이를 통해 공간 활용도와 무게 절감을 동시에 실현하였다. 이러한 설계는 고성능 연산과 정밀한 실시간 제어가 동시에 요구되는 로봇의 특성에 부합하는 하드웨어 구조를 제공한다.
Fig. 10Diagram of compact electronic system
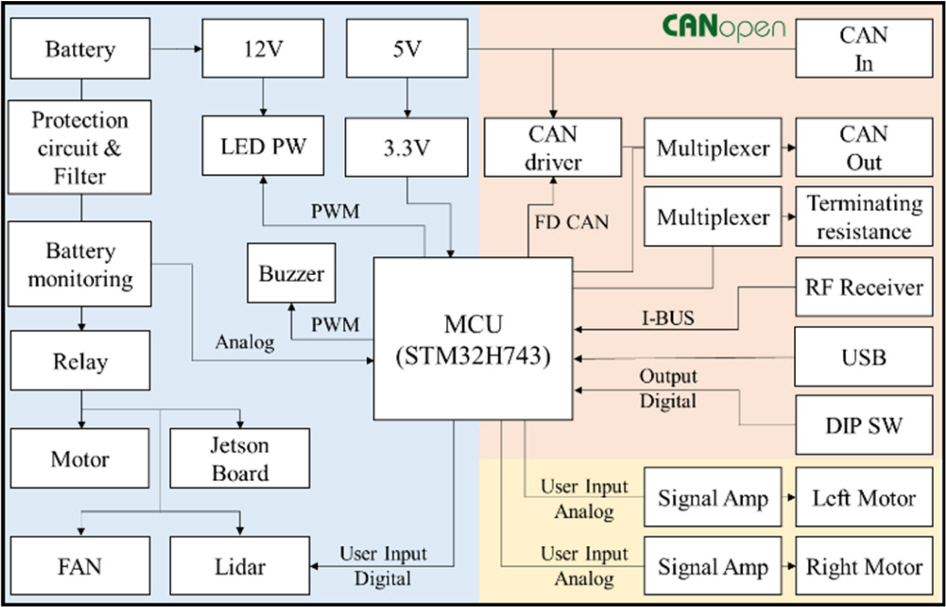
Fig. 11Developed compact electronic system
모터 제어 명령은 상위 제어기에서 생성되어 CAN FD 통신을 통해 하위 제어기로 전달되며, 하위 제어기는 이를 아날로그 신호로 변환하여 모터의 속도를 정밀하게 제어한다. 모터 제어 회로는 하위 제어기에서 출력된 아날로그 신호를 0-10 V 범위의 안정적인 전압으로 증폭시켜, 정밀한 속도 제어를 가능하게 한다. 또한 하위 제어기에는 RF 수신기가 내장되어 있어 RF 조종기를 통하여 원격으로 조종할 수 있다. 상위 제어기를 거치지 않고도 로봇을 직접 제어할 수 있어 긴급 상황 발생 시 즉각적인 수동 대응이 가능하다는 장점을 가진다. 또한, 상위 제어기에서 생성된 제어 명령을 실시간으로 처리할 수 있어 시스템의 확장성과 실시간성을 동시에 확보하였다.
전원 제어 회로는 PWM (Pulse Width Modulation) 신호를 활용하여 LED의 밝기를 조절하고, GPIO 신호를 통해 센서의 동작을 제어할 수 있도록 설계되었다. 또한, 6셀 리튬 폴리머 배터리에서 공급되는 전원을 릴레이를 통해 차단할 수 있는 구조로 구성하였으며, 배터리 전압이 일정 임계 값 이하로 떨어질 경우 자동으로 전원을 차단하는 보호 회로를 탑재하였다. 또한 실시간 배터리 전압 모니터링 기능을 통해 이상 전압 발생 시 버저가 울리도록 하였다.
3. 천장 환경 주행 실험
로봇의 주행 성능은 다음의 세 가지 실험을 통해 평가하였다. 첫 번째는 좁은 투입구를 통해 로봇이 진입할 수 있는지를 확인하는 협소 통로 진입 성능 실험, 두 번째는 다양한 높이의 단차를 가진 장애물을 로봇이 극복할 수 있는지를 검증하는 장애물 극복 실험, 세 번째는 실제 천장 구조를 모사한 환경에서의 주행 성능 실험이다.
크기(가로 150 mm × 세로 150 mm)의 단면을 통과하는 실험을 수행하였다(
Fig. 12). 로봇은 사각형 구조물 내부를 주행하며, 끼임이나 간섭 없이 통과하는 데 성공하였다. 이를 통해, 환풍구나 석고 타일과 같은 좁은 투입구를 통해 건물 내 천장 공간으로 진입할 수 있음을 확인하였다.
Fig. 12Experiment in narrow inlet environment
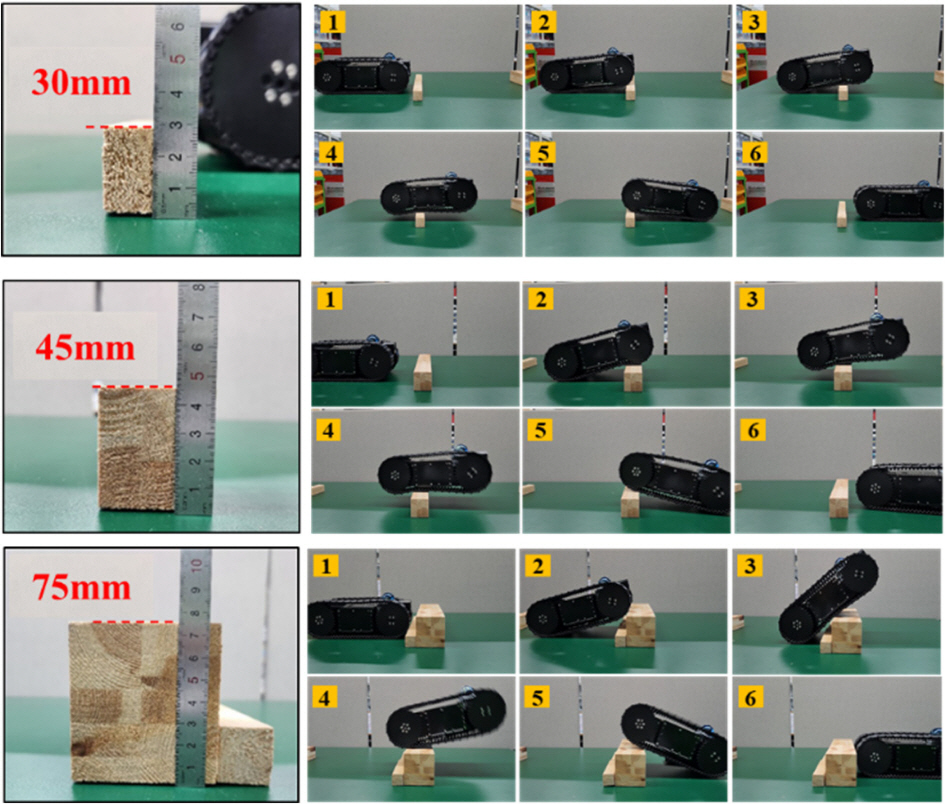
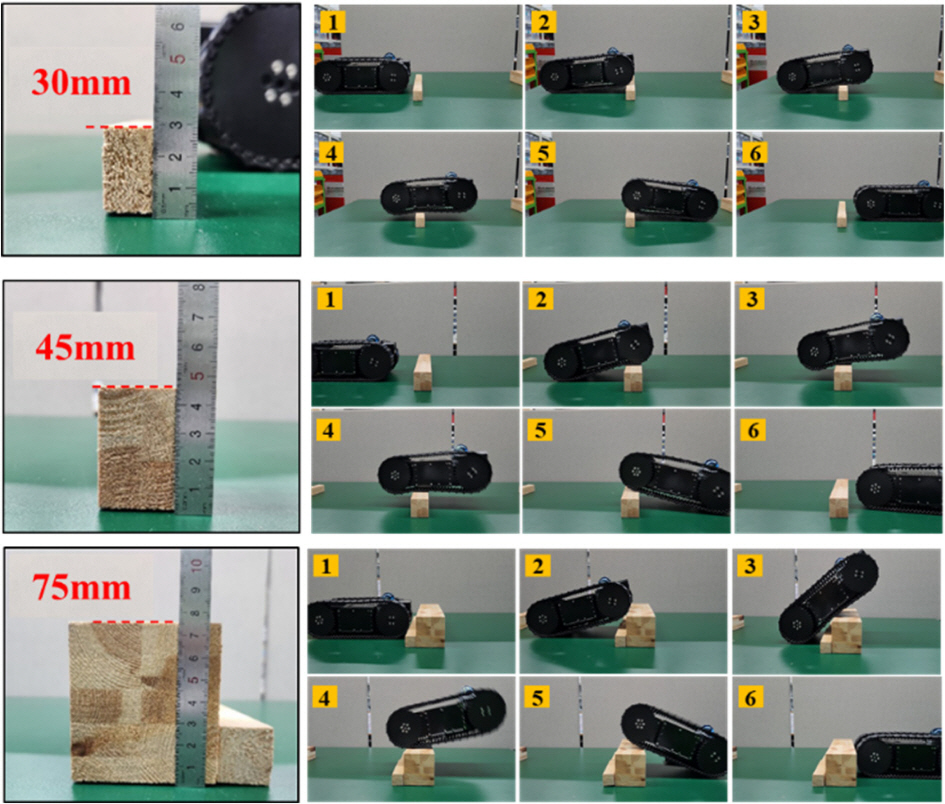
천장 환경의 구조물로 인해 발생할 수 있는 단차는 최소 17 mm에서 최대 70 mm에 이르며, 내부에는 전선, 배관 등 다양한 높이의 장애물이 혼재한다. 로봇이 장애물을 안정적으로 극복하며 주행할 수 있는지를 확인하기 위해, 장애물의 높이를 30, 45, 75 mm로 단계적으로 증가시키며 장애물 극복 성능을 평가하였다. 실험 결과(
Fig. 13), 동역학 해석을 통해 예측된 최대 극복 가능 높이인 70 mm뿐만 아니라, 그를 초과하는 75 mm 높이의 장애물도 넘을 수 있음이 확인되었다. 또한, 10회 이상의 반복 실험에서도 구조적 손상이나 부품 탈락 없이 정상적으로 작동하였다.
Fig. 13Obstacle overcoming experiment
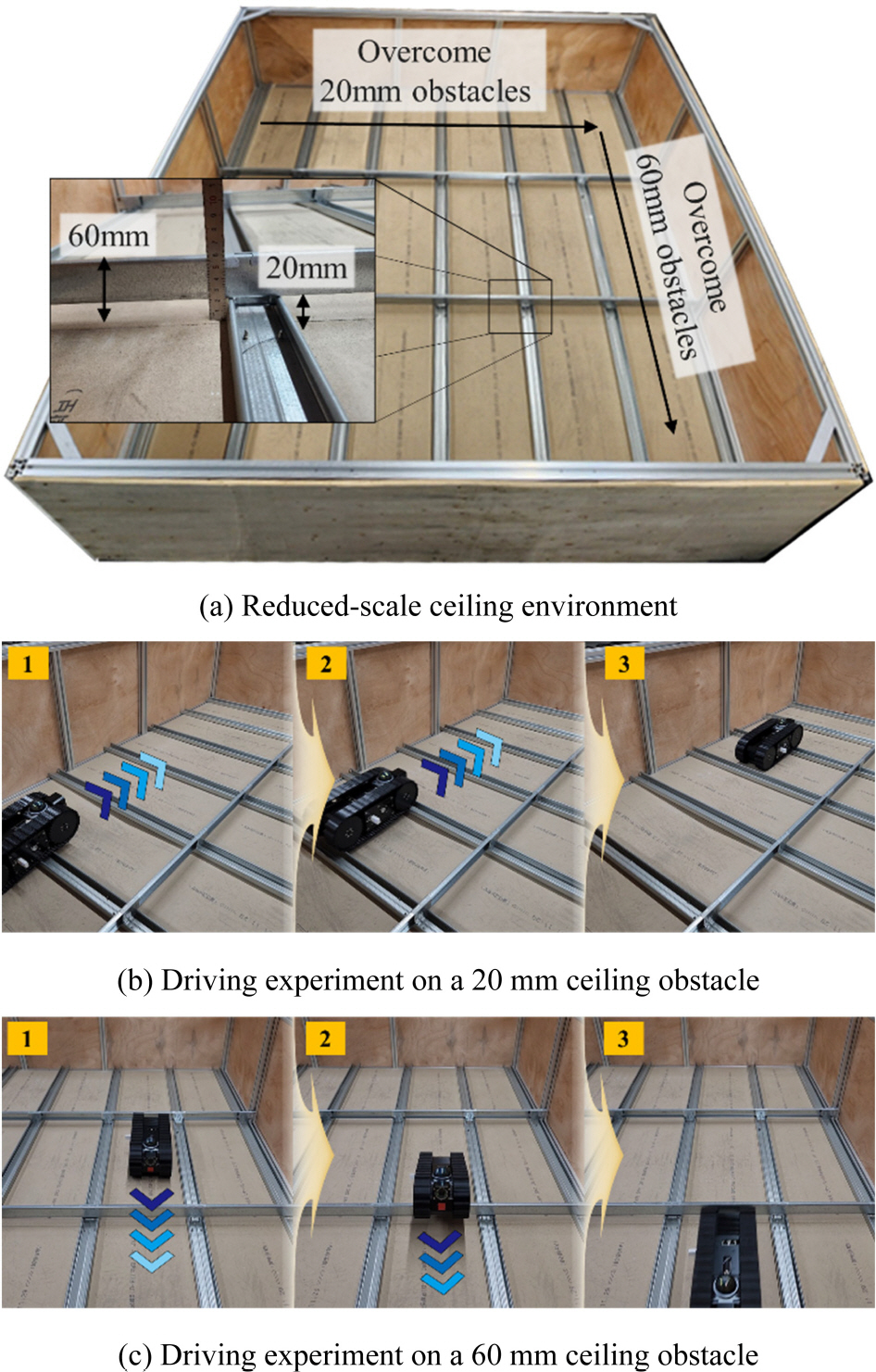
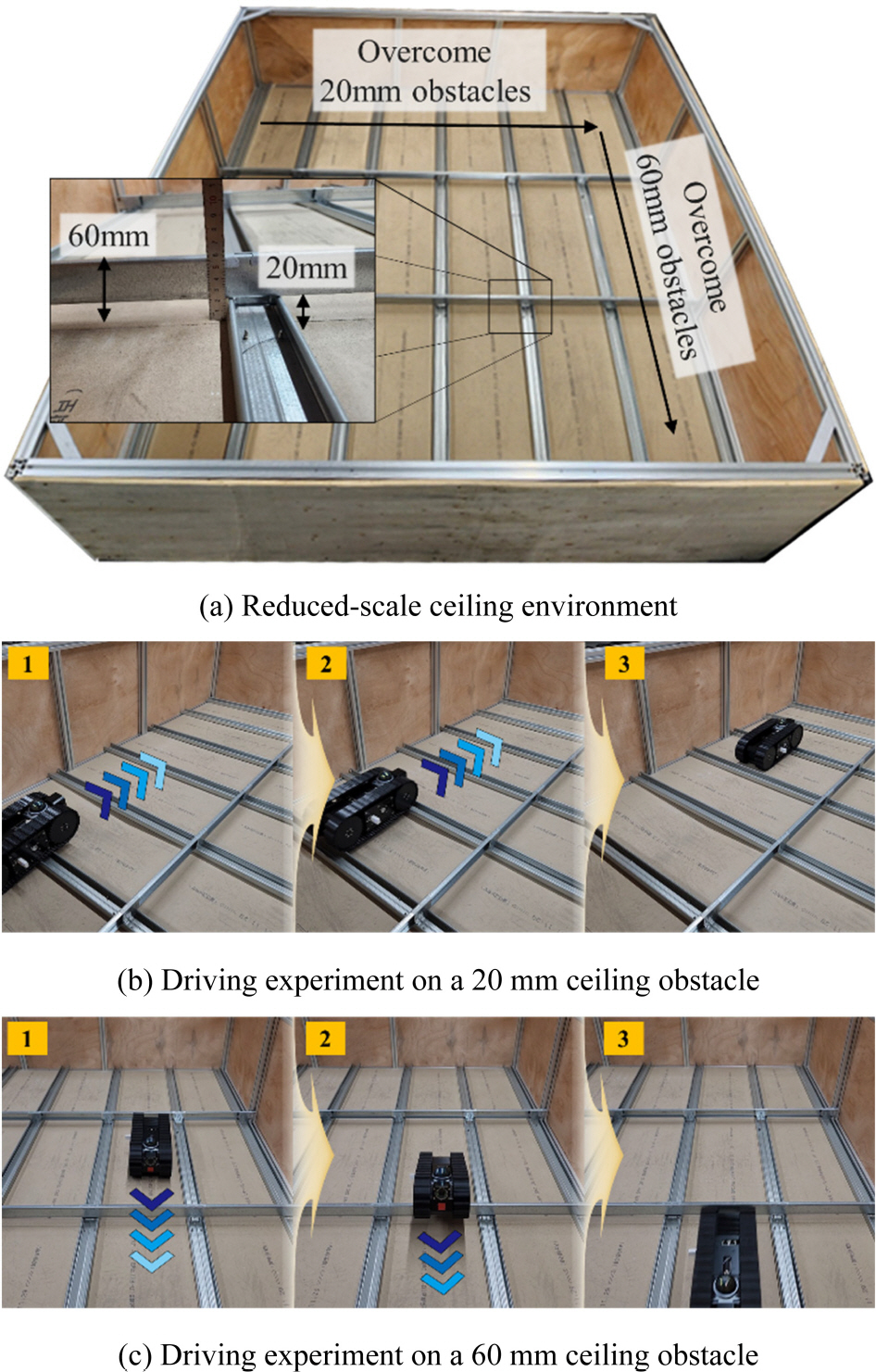
실제 천장 환경과 유사한 조건을 구현하기 위해, M-bar 구조의 경량 철골 천장 시스템을
Fig. 14(a)와 같이 제작하고, 해당 환경에서 장애물 극복 및 주행 성능을 평가하였다. 로봇을 Fig.14(b)와 같이 천장 모사 환경에 투입하였으며, 300 mm 간격으로 배치된 높이 20 mm의 주 골조를 극복하며 주행한 후, 시계 방향으로 회전하여
Fig. 14(c)와 같이 60 mm 단차를 극복하는 과정을 10회 이상 반복하였다. 이를 통해, 로봇이 성공적으로 천장 환경 내에서 주행 가능함을 입증할 수 있었다.
Fig. 14Results of the reduced-scale ceiling driving experiment
4. 천장 환경 위험물 인식 기술
4.1 위험물 탐지 모델 및 데이터 셋
천장 내부 환경은 좁은 폭과 복잡한 구조물이 얽혀 있는 협소한 공간으로, 이러한 특성을 악용하여 테러 목적의 폭발물이 설치되거나, 상자나 가방 속에 숨겨진 폭발물이 배치될 가능성이 있다. 일반적으로 이러한 위험물을 탐지하기 위해 AI 객체 탐지 모델을 활용하여 위험물 이미지를 학습시키는 방법이 사용된다. 그러나 학습 데이터에 포함되지 않은 유형의 위험물에 대해서는 탐지 정확도가 크게 저하될 가능성이 있으며, 이로 인해 탐지 실패가 발생할 수 있다.
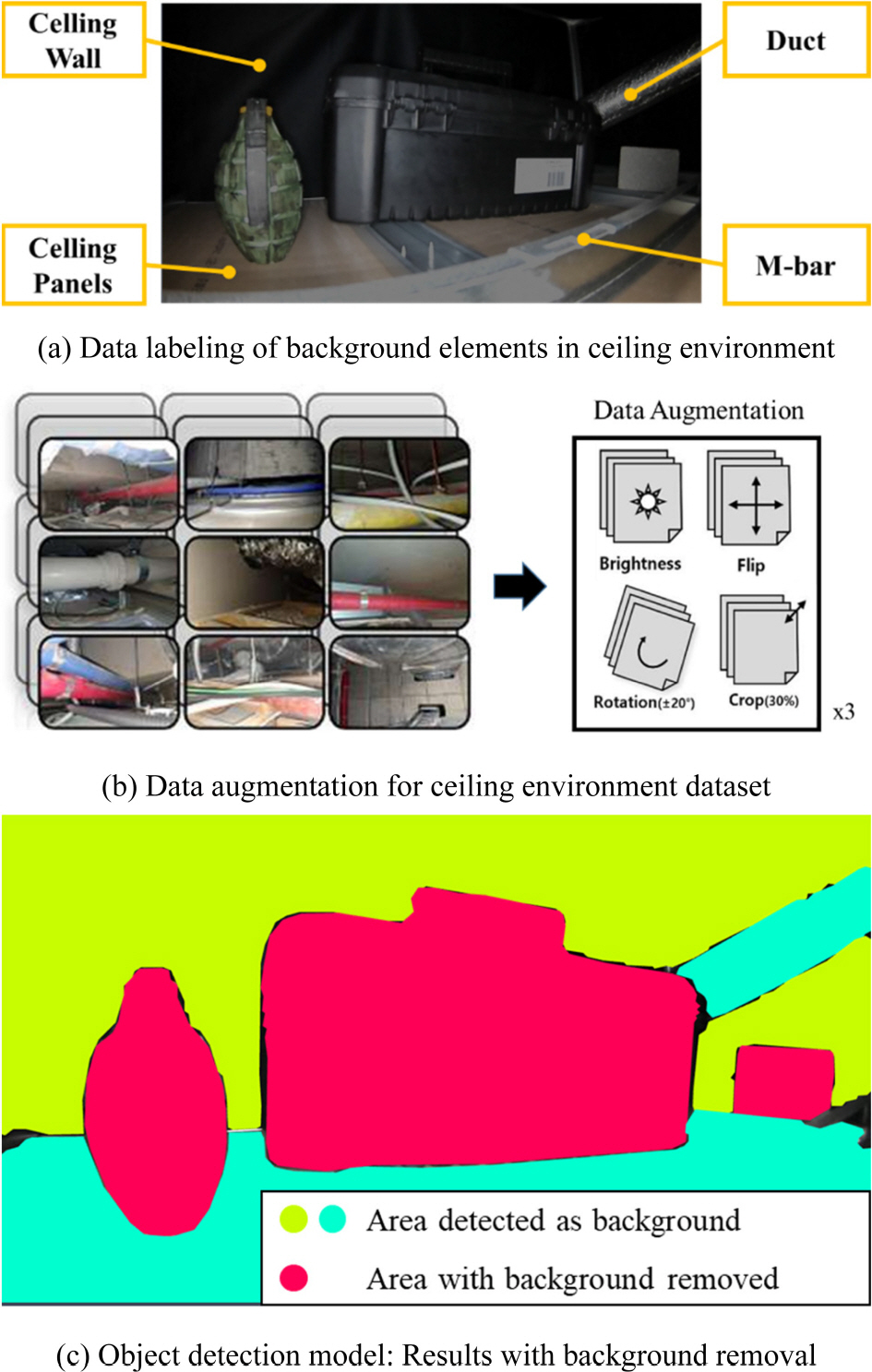
본 논문에서는 천장 환경의 공통적인 구조적 특성을 활용하는 방법을 적용하였다. 천장 환경은 천장 패널, 경량 철골 부재, 연결 부품 등 유사한 구조로 구성되어 있다. 이를 바탕으로, AI 객체 탐지 모델이
Fig. 15(a)와 같은 천장 환경 요소를 학습한 후, 이 요소들을 제거하고 남은 영역을 위험물로 특정하는 방식을 적용하여 위험물을 탐지하였다.
Fig. 15Training dataset and results of the hazardous object detectio
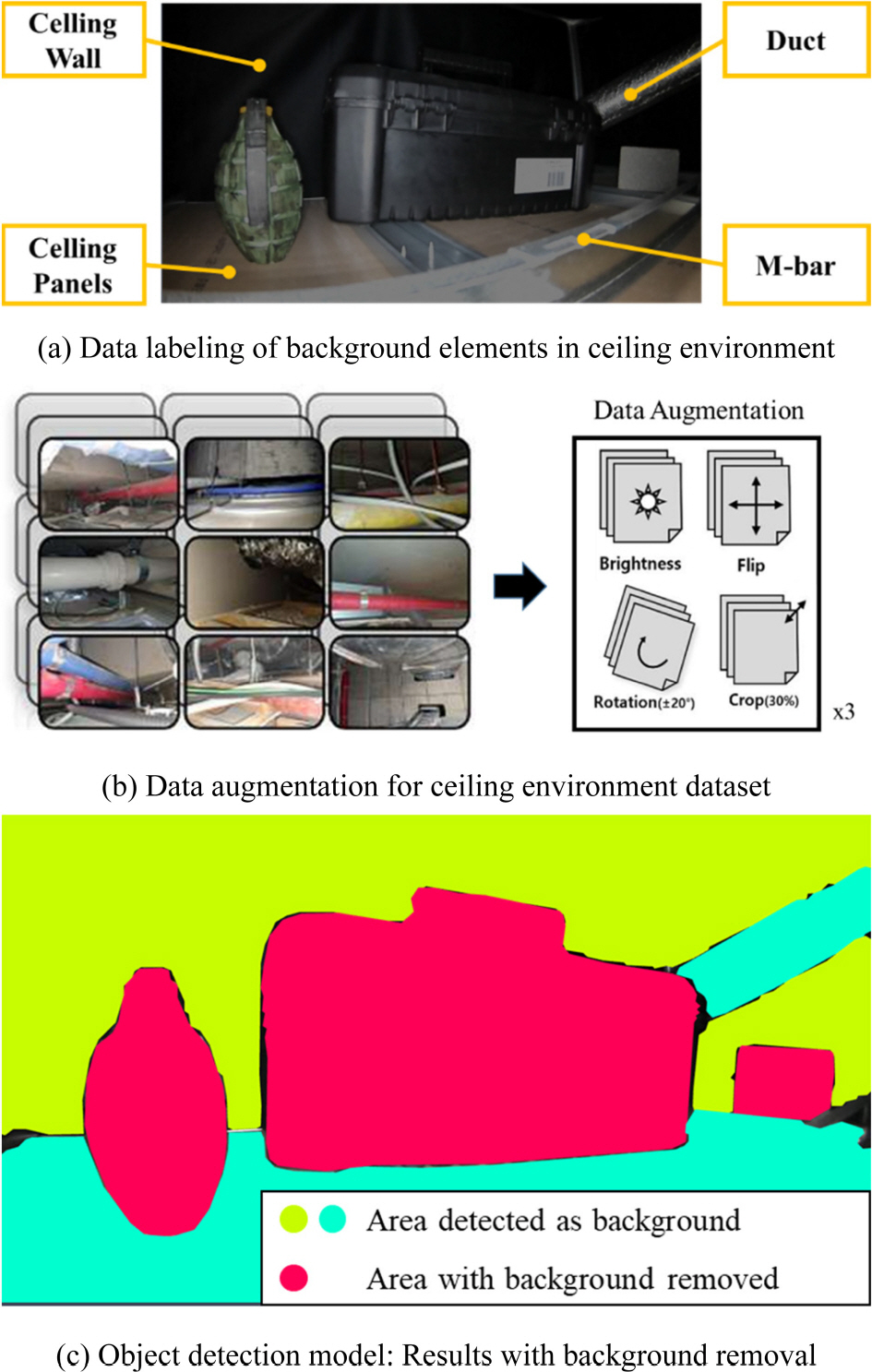
천장 환경 학습을 위해 YOLOv8-Seg 기반 객체 탐지 모델을 활용하였다[
11]. 데이터 셋은 실제 천장 환경 이미지 874장, 천장 모의 환경 이미지 3,083장을 포함하여 총 3,957장을 확보하였고,
Fig. 15(b)와 같이 이미지 증강(Data Augmentation) 기법을 적용하여 훈련 데이터 10,835장과 검증 데이터 1,625장의 데이터 셋을 구축하였다.
객체 탐지 모델은 철골 구조물, 천장 패널, 천장 환경 벽면, 환풍구 등 천장 환경 구조물을 학습하도록 설정하였으며, batch 16, epoch 130 기준으로 학습한 결과, mAP (mean Average Precision) 0.88을 달성하였다. 천장 환경 탐색 완료 후, 저장된 이미지 데이터를 기반으로 로봇의 상위 제어기에서 객체 탐지 모델을 활용하여 오프라인 방식으로 위험물 탐지를 수행한다. 이때 위험물 탐지 알고리즘의 평균 연산 속도는 21.2 fps이며, Fig.15(c)에서 확인할 수 있듯이, AI 모델이 천장 환경의 배경 요소를 제거한 후, 이외의 영역을 위험물로 탐지하는데 성공하였다.
4.2 객체 필터 설계 및 적용
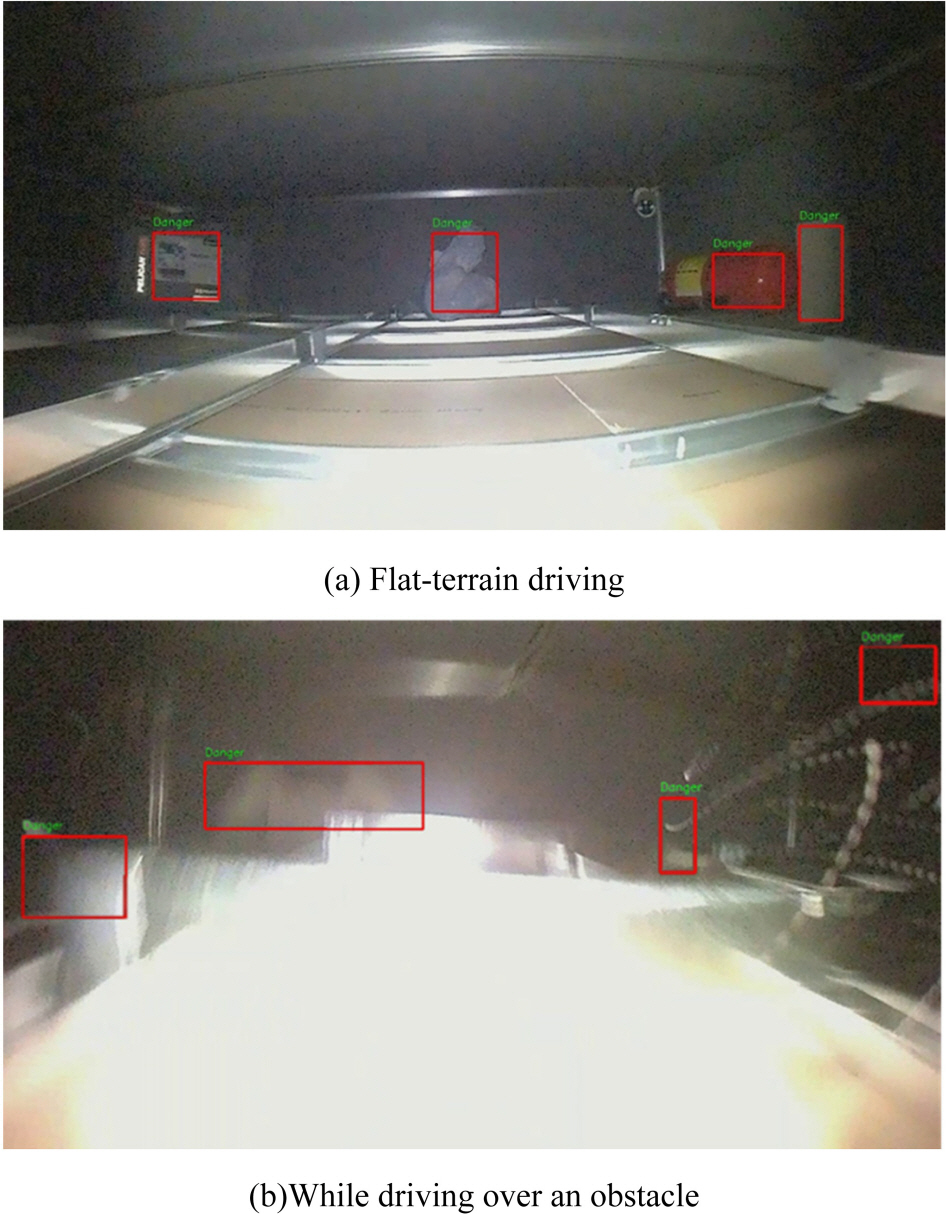
천장을 구성하는 부품과 반복되는 구조적 특성은 위험물 탐지에 유리한 요소로 작용하지만, 주 골조와 보조 골조로 인해 발생하는 17-70 mm의 단차는 심각한 오탐지 (False Positive)를 초래할 수 있다. 일반적인 상황에서는
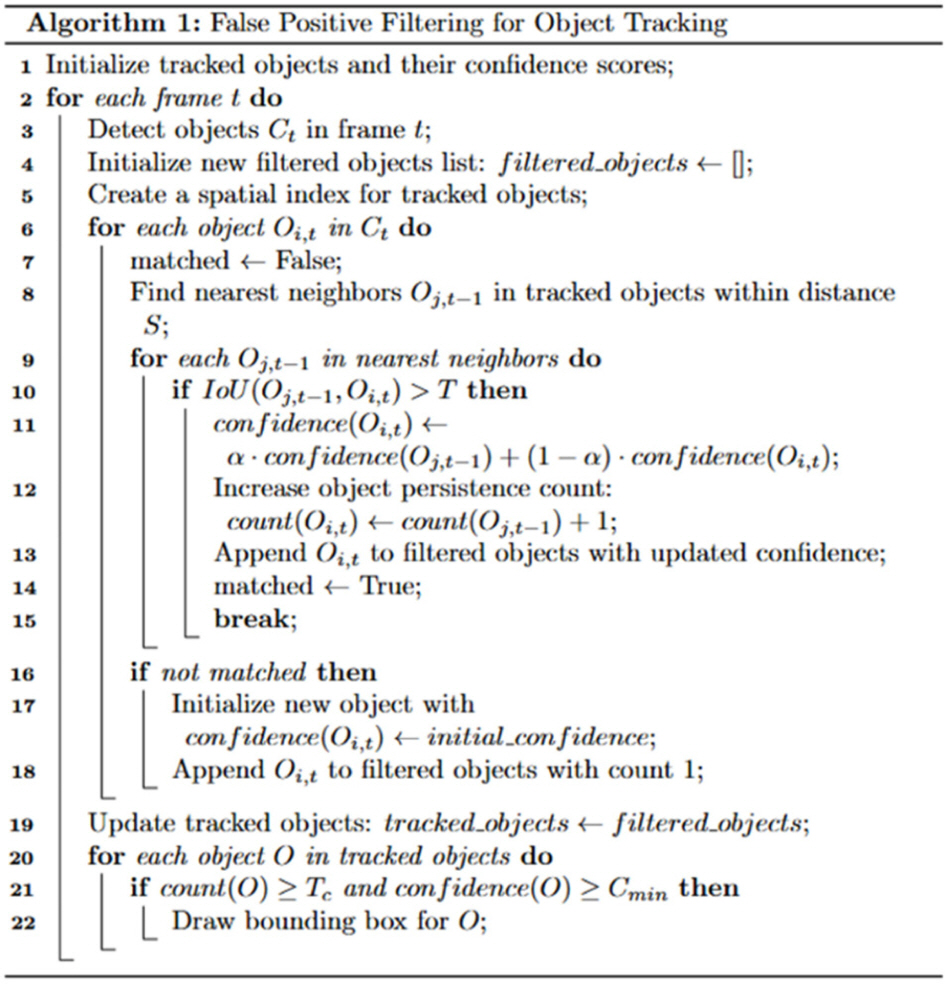
Figs. 16(a)와 같이 위험물을 정확히 탐지할 수 있으나, 골조의 장애물을 극복하는 과정에서는 16(b)와 같이 카메라의 흔들림이 발생하여 모션 블러 (Motion Blur)가 유발될 수 있다. 이로 인해 이미지의 선명도가 저하되면서, 객체 탐지 모델이 배경을 위험물로 잘못 인식하는 오탐지가 발생할 가능성이 존재한다. 이를 극복하기 위해, 객체가 일정 프레임 이상 지속적으로 탐지되어야 최종 검출 대상으로 간주하는 객체 필터를 적용하였다. 객체 필터는 다음과 같은 순서로 작동한다.
Fig. 16Hazardous object detection during normal driving and under visual challenges caused by obstacle overcoming
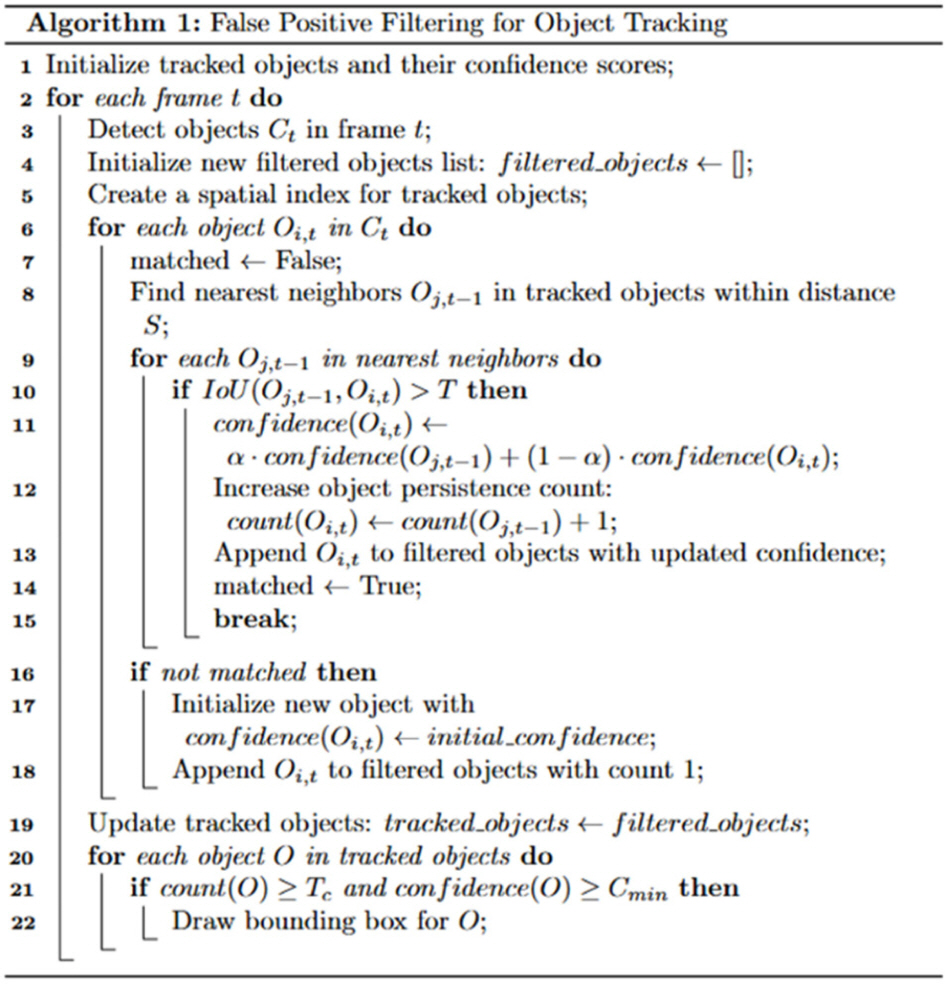
탐지된 객체 집합 정의: 현재 프레임에서 탐지된 객체(Oi,t)의 집합(Ct)은 식(1)과 같이 정의된다.
연속 프레임 간 객체 일치 판단: 이전 프레임의 객체 집합 (CT - 1) 내 탐지 객체(Oi,t - 1)와 현재 프레임 객체(Oi,t) 간의 유클리드 거리가 허용 반경r 이하일 경우, 동일한 객체로 간주한다.
연속 탐지 조건 충족 시 유효 객체로 판정: 특정 객체(Oi,t)가 연속된 프레임에서 최소 n번 탐지된 경우, 최종 검출 대상으로 간주한다. 이를 위해 각 객체의 탐지 횟수를 누적하여 계산한다.
본 연구에서 설계한 객체 필터는 연속적인 프레임 검출 조건과 거리 기반 필터링을 결합하여 오탐지를 줄이고, 신뢰할 수 있는 객체 검출을 수행하도록 설계되었다.
Fig. 17에서 객체 필터 알고리즘의 의사코드(Pseudo-code)를 확인할 수 있다.
Fig. 17Pseudo code of object filtering algorithm
4.3 천장 모사 환경 위험물 탐지 실험 결과 및 분석
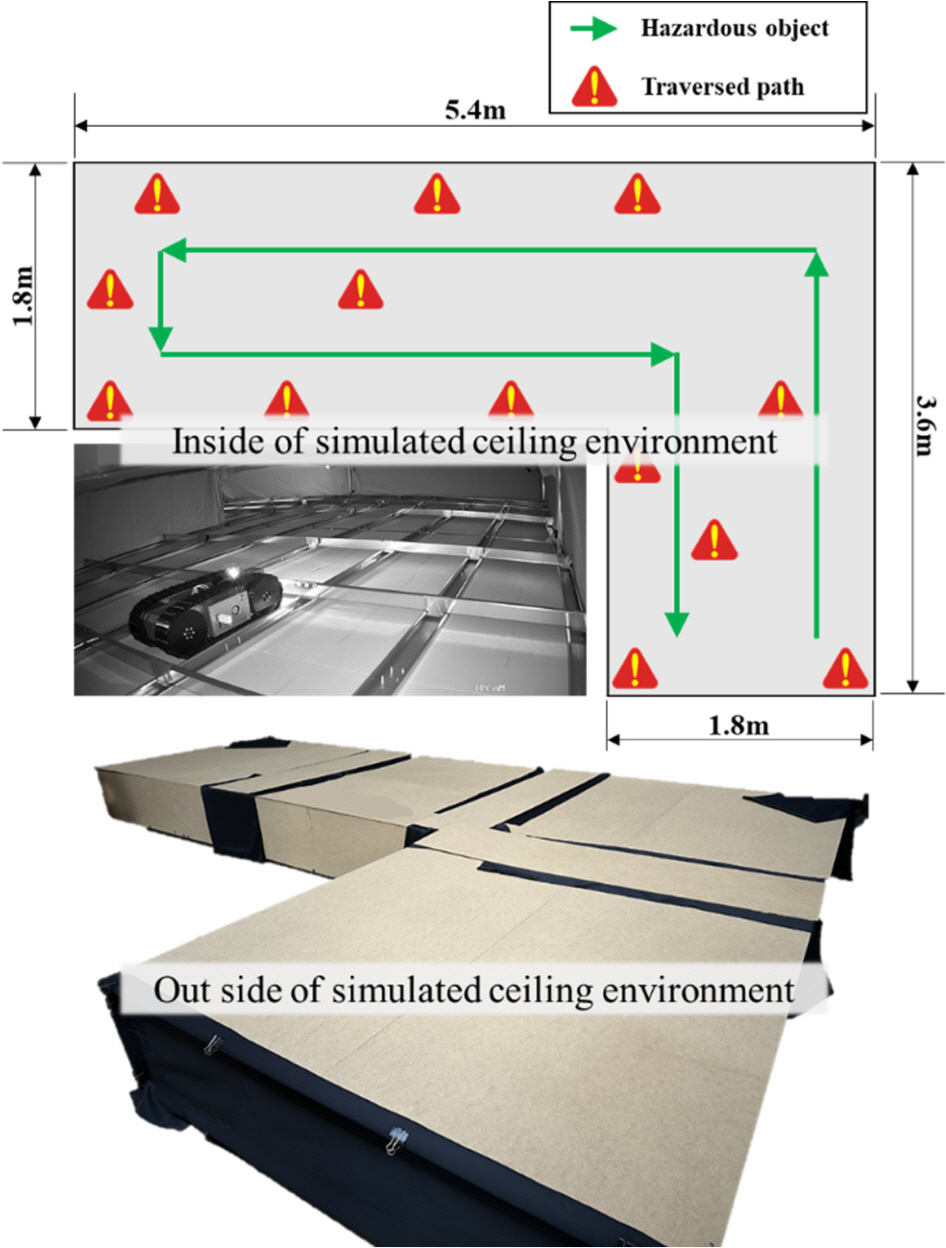
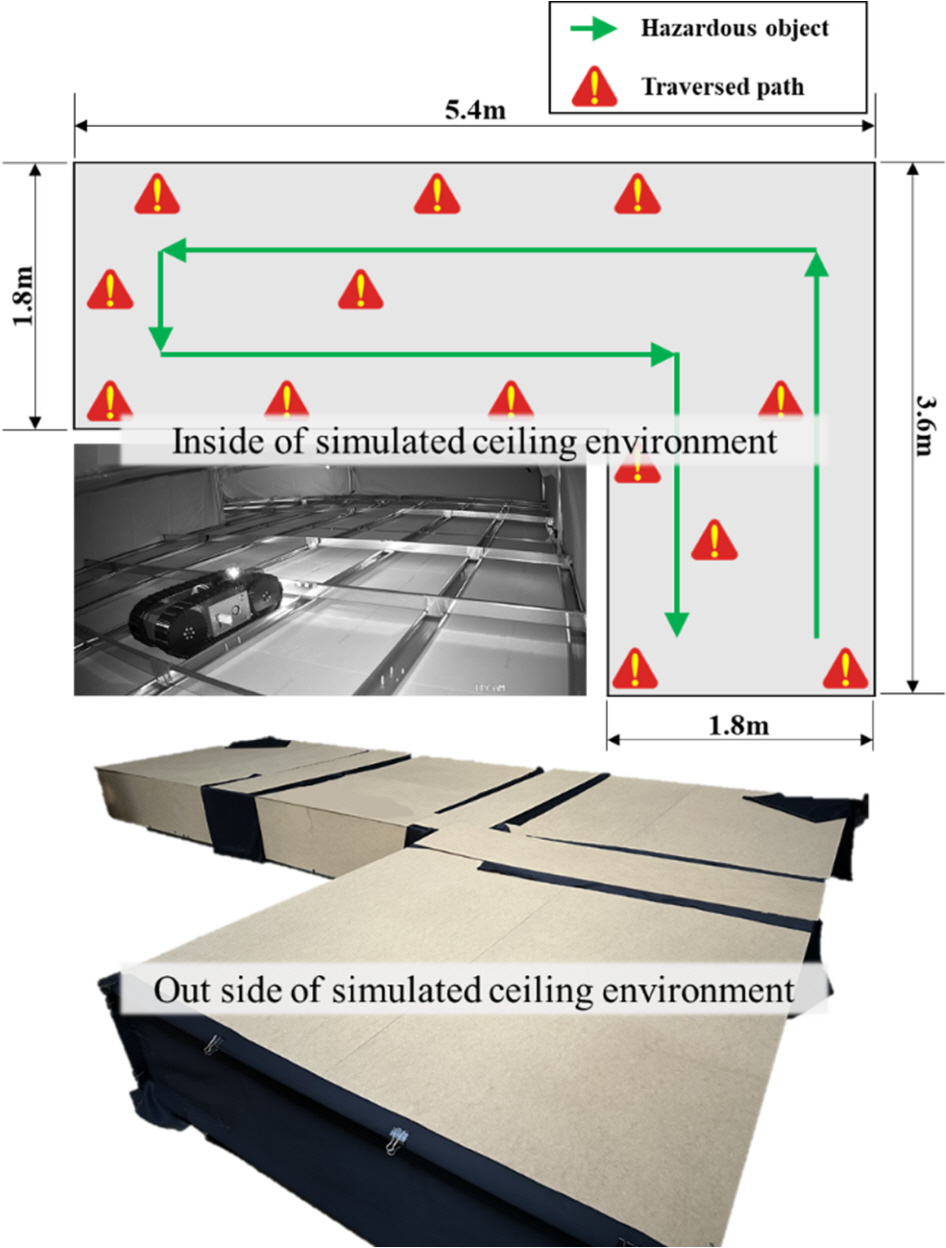
협소 공간 환경에서의 위험물 탐지 성능을 평가하기 위해,
Fig. 18과 같이 가로 1.8 m, 세로 1.8 m 크기의 구역 4개로 구성된 총 12.96 m
2의 천장 모사 환경을 구축하고, 내부에 폭탄 형태의 물체, 소화기, 종이박스, 전자통신 기기 등 탐지 대상이 될 수 있는 위험물 객체 15종을 배치하였다.
Fig. 18Reduced-scale ceiling environment
로봇은 리튬폴리머(Lithium-Polymer), 6-cell (22.2V), 1,550mAh 배터리를 탑재하고 있으며, 1회 충전 기준 1시간 연속 주행이 가능하다. 본 실험에서는 사용자가 직접 조종기를 통해 로봇을 수동 조작하였으며, 약 2분 46초 동안 천장 환경을 탐색하며, 총 5,000프레임의 천장 환경 내부 이미지를 30 fps로 취득하였다. 획득한 모든 이미지에 대해 GT (Ground Truth) 위험물 데이터 라벨링을 수행한 후, 4.1절에서 학습한 위험물 탐지 모델을 적용하여 객체 탐지를 수행하였다. 탐지 결과를 GT 데이터와 비교하여 객체 필터 적용 여부에 따른 성능 차이를 분석하였다. 객체 필터의 성능을 평가하기 위해, 탐지된 객체와 GT간의 일치 정도를 판단하는 IoU (Intersection over Union) 개념을 적용하였다. IoU는 예측된 객체 영역과 실제 GT객체 영역 간의 교집합(Intersection)과 합집합(Union)의 비율을 의미하며, 값이 1에 가까울수록 정확한 탐지 결과를 의미한다. IoU를 활용하여 탐지 결과의 신뢰도를 평가하고, 이를 바탕으로 탐지 성능을 정량적으로 분석하였다. 객체 탐지 성능 평가는 다음 지표를 통해 수행되었다.
● TP (True Positive): GT 위험물과 위험물 탐지 결과의 IoU 가 0.5 이상일 때 TP로 판정
● FN (False Negative): GT 위험물에 대해 탐지 결과가 없거나, IoU가 0.5 미만인 경우
● FP (False Positive): GT 위험물이 없는 위치에 위험물 탐지 결과가 존재하는 경우
-
● Recall: GT 위험물 중 위험물 탐지 모델이 탐지한 비율
● Precision: 위험물 탐지 모델이 탐지한 객체 중 실제로 GT 위험물인 비율
본 연구에서는 오탐지(False Positive)가 증가하더라도 모든 위험물을 탐지하는 것이 목적이므로 FN을 최소화하는 것이 중요하다. 그러나, 오탐지가 과도하게 많으면 불필요한 경보가 발생하여 탐지 신뢰도가 저하될 수 있는데 이를 필터링할 수 있는 객체 필터의 성능 또한 중요하다. 본 연구에서는 이러한 요소를 종합적으로 고려하여 평가지표를 구성하여 탐지 성능을 평가하였다. 객체 필터를 적용한 결과,
Table 3에 요약된 바와 같이 TP 4,168, FN 412, FP 322를 기록하였으며, Precision 0.93, Recall 0.91을 달성하였다. 이는 객체 탐지 모델이 실제 위험물을 높은 신뢰도로 탐지할 수 있음을 입증하며, 객체 필터가 오탐지를 효과적으로 감소시켜음을 의미한다. 반면, 객체 필터를 적용하지 않은 경우(
Table 4) TP 4,427로 소폭 증가하였으나, FP가 1,402로 급증하면서 Precision이 0.76으로 감소하였다. 또한, FN이 695로 증가하여 Recall도 0.86으로 낮아지는 결과를 보였다. 이는 객체 필터를 적용하지 않을 경우, 모델이 다양한 배경 요소를 위험물로 오인하는 경향이 증가하여 탐지 성능이 저하됨을 의미한다.
Table 3Results of hazardous object detection with object filter applied
Table 3
|
Confusion matrix |
Object detected |
Not detected |
Recall |
|
Object |
TP: 4168 |
FN: 412 |
0.91 |
|
Background |
FP: 322 |
- |
- |
|
Precision |
0.93 |
- |
- |
Table 4Results of hazardous object detection without object filter
Table 4
|
Confusion matrix |
Object detected |
Not detected |
Recall |
|
Object |
TP: 4427 |
FN: 695 |
0.86 |
|
Background |
FP: 1402 |
- |
- |
|
Precision |
0.76 |
- |
- |
5. 결론
기존에는 경호요원이 높은 곳에 있는 천장을 뜯어 수색하고 복구하는 방식으로 수행하던 천장 위험물 탐색 작업을 본 연구에서 제안한 로봇을 활용하면 편리하고 효과적으로 수행할 수 있다. 개발한 로봇은 150 × 150 mm 크기의 좁은 투입구를 원활하게 통과하고, 최대 75 mm 높이의 장애물을 넘을 수 있음을 실제 천장 환경에서 실험적으로 검증하였다. 위험물 탐지를 위해 YOLOv8-Seg 기반의 위험물 탐지 모델을 개발하였으며, 천장 환경의 구조적 요소를 학습한 후 이를 제거하여 위험물을 탐지하는 방식을 적용하고 객체 필터를 추가하여 탐지 신뢰성을 향상한 결과 Precision 0.93, Recall 0.91의 높은 위험물 탐지 성능을 얻었다.
향후에는 본 연구에서 개발한 로봇으로 천장 환경에서 실시 간 위치 인식과 지도 생성(SLAM)을 수행하여 위험물의 위치를 지도에 표시해 주는 기능을 개발할 예정이다. 또한 더 높은 장애물을 넘고 더 많은 센서를 탑재할 수 있도록 여러 대의 로봇을 연결한 사슬형 로봇에 관한 연구를 진행할 예정이다.
ACKNOWLEDGMENTS
이 연구는 산업통상자원부 산업기술혁신사업 및 한국산업기술기획평가원 (KEIT) 연구비 지원에 의한 연구임(No. 20018110).
REFERENCES
- 1. Pettersen, K. Y., (2017), Snake robots, Annual Reviews in Control, 44, 19-44.
- 2. Liu, J., Tong, Y., Liu, J., (2021), Review of snake robots in constrained environments, Robotics and Autonomous Systems, 141, 103785.
- 3. Coad, M. M., Blumenschein, L. H., Cutler, S., Zepeda, J. A. R., Naclerio, N. D., El-Hussieny, H., Mehmood, U., Ryu, J. H., Hawkes, E. W., Okamura, A. M., (2019), Vine robots, IEEE Robotics & Automation Magazine, 27(3), 120-132.
- 4. Blumenschein, L. H., Coad, M. M., Haggerty, D. A., Okamura, A. M., Hawkes, E. W., (2020), Design, modeling, control, and application of everting vine robots, Frontiers in Robotics and AI, 7, 548266.
- 5. Hawkes, E. W., Blumenschein, L. H., Greer, J. D., Okamura, A. M., (2017), A soft robot that navigates its environment through growth, Science Robotics, 2(8), eaan3028.
- 6. Oza, P., Sindagi, V. A., Sharmini, V. V., Patel, V. M., (2023), Unsupervised domain adaptation of object detectors: A survey, IEEE Transactions on Pattern Analysis and Machine Intelligence, 46(6), 4018-4040.
- 7. Xu, Y., Zhu, L., Yang, Y., Wu, F., (2021), Training robust object detectors from noisy category labels and imprecise bounding boxes, IEEE Transactions on Image Processing, 30, 5782-5792.
- 8. Kim, H., Bae, S., (2017), A study of the development of a modular, lightweight steel ceiling system, Korean Journal of Air-Conditioning and Refrigeration Engineering, 29(5), 269-277.
- 9. Sim, B., Kim, K., Yu, K., (2017), Design of exploration rover platform with movable center of mass for enhancement of trafficability and stability, Journal of Institute of Control, Robotics and Systems, 23(10), 873-878.
- 10. Lee, S., Park, J., Park, J., (2015), Design and implementation of a mobile robot with a variable structure for tip-over prevention, Journal of Institute of Control, Robotics and Systems, 21(4), 356-360.
- 11. Ultralytics, Ultralytics YOLOv8. https://docs.ultralytics.com/ko/models/yolov8/.
Biography
Sangwoong Lee
Graduated from Kumoh Institute of Technology, Department of Mechanical Engineering, M.S. degree. He is currently a researcher at the Korea Institute of Robotics & Technology Convergence. His research interests include field robotics.
Daegwon Koh
Graduated from Gwangju Institute of Science and Technology, Department of Mechanical Engineering, M.S. degree. He is currently a researcher at the Korea Institute of Robotics & Technology Convergence. His research interests include Fault Diagnosis of Robots.
Meungsuk Lee
Graduated from Pohang University of Science and Technology, Department of Electronic Engineering, M.S. degree. He is currently a researcher at the Korea Institute of Robotics & Technology Convergence. His research interest include field robotics, robot system integration and intelligent robotics
Hyeongseok Song
Graduated from Handong Global University, Department of Mechanical & Control System, M.S. degree. He is currently a researcher at the Korea Institute of Robotics & Technology Convergence. His research interest include sensor calibration, robot vision, and autonomous driving.
Juhyun Pyo
Ph.D. in Creative IT Convergence, Pohang University of Science and Technology(POS-TECH) in 2018. Since 2019, Senior Researcher at the Korea Institute of Robotics & Technology Convergence. His research interests include field robotics, disaster safety robots, and robot system development.
Jinho Suh
Professor in the Major of Mechanical System Engineering, Division of Energy Transport Systems Engineering, College of Engineering, Pukyong National University. His research interest is disaster response robot, underwater robots, and system control & integration in field robotics.
Murim Kim
Director and Chief Researcher with the Human-centered Robotics R&D Division of the KIRO, Pohang, South Korea. His research interests include robust control of nonlinear plants, time-delay control, robot motion control, collaborative robots, disaster robotics, and factory automation. Dr. Kim serves as an associate editor of the International Journal of Control, Automation, and Systems, and Journal of the Korean Society for Precision Engineering.