ABSTRACT
This paper presents a tiltable cable-suspended aerial manipulation (SAM) system designed to improve the utility of aerial manipulators in industrial settings. Although drone-robot arm systems have shown promise, suspended configurations encounter notable stability challenges, particularly during inclined operations. To tackle these challenges, we performed simulation-based analyses focusing on the system's kinematics, dynamic response, and thrust requirements under tilted conditions. We utilized Monte Carlo sampling and forward kinematics to assess the workspace and manipulability. The findings indicated that each propeller needs to generate over 32 N of thrust to maintain stable control. Additionally, simulation experiments showed that the system can uphold its attitude and execute end-effector motions effectively, even in the presence of disturbances. This study establishes a foundational verification step toward developing a physical SAM system capable of safe and robust operation in inclined scenarios.
-
KEYWORDS: Aerial manipulation, Drone, Optimal control, Redundant manipulator
-
KEYWORDS: 공중 조작시스템, 드론, 최적제어, 여유자유도 로봇팔
1. 서론
최근 드론과 로봇 팔을 결합한 공중 매니퓰레이션 시스템(Aerial Manipulation System) 기술에 대한 연구가
Fig. 1를 포함하여 활발하게 이루어지고 있다[
1,
2]. 공중에서 로봇 팔을 이용하면 높은 곳에서 다양한 작업을 수행할 수 있다. 그러나 드론을 사용하게 되면 배터리 문제 때문에 장시간 사용이 불가하다. 이 문제를 해결하기 위해 독일 항공 우주 센터(DLR)는 C able Suspended Aerial Manipulation (SAM) 시스템을 개발하였다[
3].
SAM 시스템은 케이블을 이용해 전체 시스템을 지탱함으로써, 중력의 영향을 효과적으로 보상할 수 있다. 이 시스템에서는 드론이 외란을 보상하는 역할을 수행하며, 이를 통해 로봇 팔의 안정적인 작업이 가능해진다. DLR의 연구 이후 SAM 시스템 관련하여 다양한 후속 연구가 진행되었다[
4-
6]. 물리적 상호작용 작업을 수행할 수 있는 SAM 시스템이 Kong et al.(2024)에 의해 개발되었는데 양팔 형태의 로봇 팔을 사용하고, 원격 조작이 가능하도록 설계하였다[
4]. Gabellieri 등은 SAM 시스템에 계층적 제어 프레임워크를 적용하여 순응 제어를 구현하였다[
5]. 이러한 기존 연구들은 하방 조작 작업을 수행할 수 있는 공중 조작 시스템에 관한 연구이며 드론 시스템은 작업 중 수평 상태를 유지하게 된다. 드론 시스템이 기울어진 상태에서 측면 작업을 수행할 수 있는 SAM에 대한 연구는 아직 없었다.
SAM 시스템으로 공중 작업을 할 때 드론 본체를 기울일 수 있으면 작업 영역이 획기적으로 증대되는 이점이 있다. 로봇 팔이 아래 보기 작업을 할 때에는 드론이 수평을 유지하면서 작업이 가능하나, 벽면에 대한 작업을 수행하려면 드론의 프로펠러가 벽면이나 기타 지형물에 충돌할 위험이 증가하게 된다(
Fig. 2 참고). 따라서 본 논문에서는 기울임 작업이 가능한 현수형 공중 조작 시스템을 제안한다. 제안된 이 시스템은 기구 설계 및 시뮬레이션 기반 분석을 통해 드론 시스템을 기울인 상태에서도 안정적으로 측면 작업을 수행할 수 있도록 필요한 추력을 도출하고 이를 검증하였다. 또한 SAM 시스템 구조를 통해 중력 하중을 지탱하지만, 케이블의 길이 변화나 로봇팔의 움직임에 따라 진자 운동이 발생하기 쉽다. 이는 단순한 크레인 기반 시스템만으로는 제어가 어려우며, 따라서 본 연구에서는 드론의 추력 제어를 이용해 공중 플랫폼의 진동을 감쇠하고 경사 작업시 안정적인 자세를 유지하도록 하였다.
논문의 구성은 다음과 같다. 제2장에서는 기구학 분석을 통해 기울임이 가능한 구조의 이점을 제시한다. 제3장에서는 외란 억제를 위해 필요한 프로펠러의 추력을 계산하며, 제4장에서는 설계된 SAM 시스템을 시뮬레이션 환경에서 외란과 동작 수행 능력을 검증한다. 마지막으로 제5장에서 결론을 제시한다.
2. SAM 시스템의 기구학적 분석
이 연구에서 사용되는 SAM 시스템은
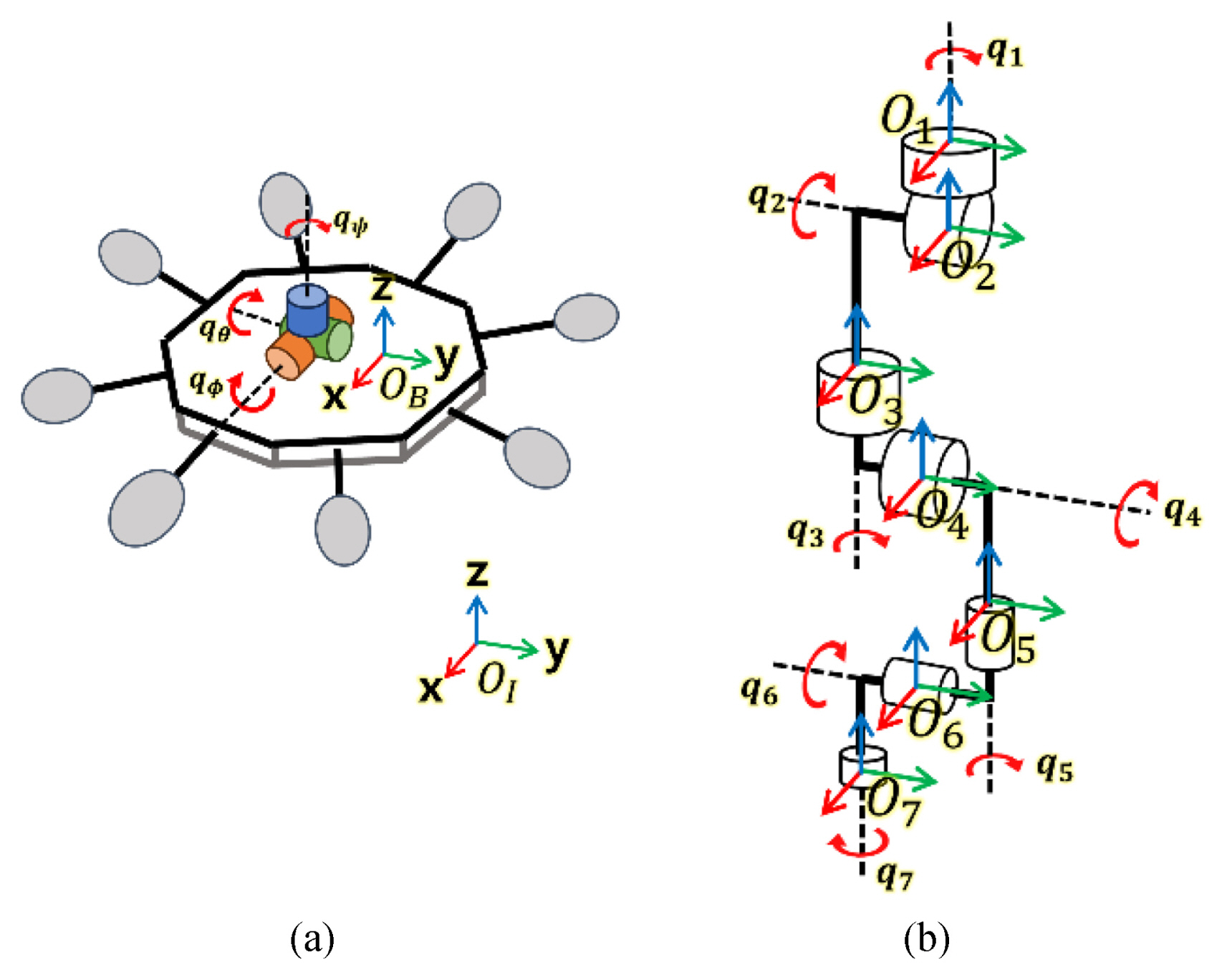
Fig. 3과 같은 구성으로 설계된다. 이 시스템은 최대 가반하중 7 kg을 목표로 하였다. 이를 견디기 위해 8개의 프로펠러를 사용하는 드론형태의 공중 플랫폼이 있으며(
Fig. 3(a) 참조), 7자유도의 로봇 팔을 포함하고 있다(
Fig. 3(b) 참조). 이 로봇 팔은 공중 플랫폼의 아래에 위치하여 결합되지만, 정 중앙이 아닌 약간 편향되게 위치한다. 이는 로봇 팔이 작업할 때 무게 중심이 시스템을 크게 벗어나는 것을 방지하기 위한 설계다. 이 SAM 시스템은 일반적인 드론과는 다르게 케이블에 매달린 현수형이기 때문에 위치는 현수시스템에 의해 결정되며, 그 외의 회전 요소인 롤, 피치, 요와 로봇팔의 7개 자유도만 고려하면 된다. 따라서 이 시스템은 10개의 자유도를 갖는 시스템이 된다.
이 시스템의 구동을 위해서는 작업공간에 대한 분석이 필요하다. 작업 공간에 대한 분석은 랜덤한 데이터를 기반으로 한 Monte Carlo 방법을 활용하여 정기구학 계산을 수행하여 작업공간을 분석한다[
7]. 정기구학을 위한 계산식은 식(1)을 따른다.
여기서
TEI(q)는 초기 프레임의 좌표계에 대한 말단의 프레임 좌표계의 변환행렬이다. q는 이 시스템의 일반화된 좌표계에 대한 변수들의 벡터이다. 각 변수들은, 공중 플랫폼에 대한 요()- 피치(θ)-롤()부터 로봇팔의 첫번째 관절(q
1)부터 마지막 관절(q
7)까지이다.
TBI과
TE7는 각각 평행 이동 정보만 있는 변환행렬이다. A(q)는 인접한 링크 프레임 간의 동차 변환행렬이다. 이 방법을 기반으로 하여, Monte Carlo 방법을 수행한다. 이 방법에서 사용된 랜덤 데이터의 개수는 200,000개로 하였다. 이식에 활용되는 관절들의 범위나 위치 벡터는
Table 1에 정리되어 있다. 이 Table에서 p ∈
R3는 위치 벡터를 의미한다. 이 시스템은 로봇팔에 공중 플랫폼을 추가한 형태이기 때문에, 공중 플랫폼을 추가 전후 작업공간의 범위가 어떻게 변하는지 분석할 필요가 있다.
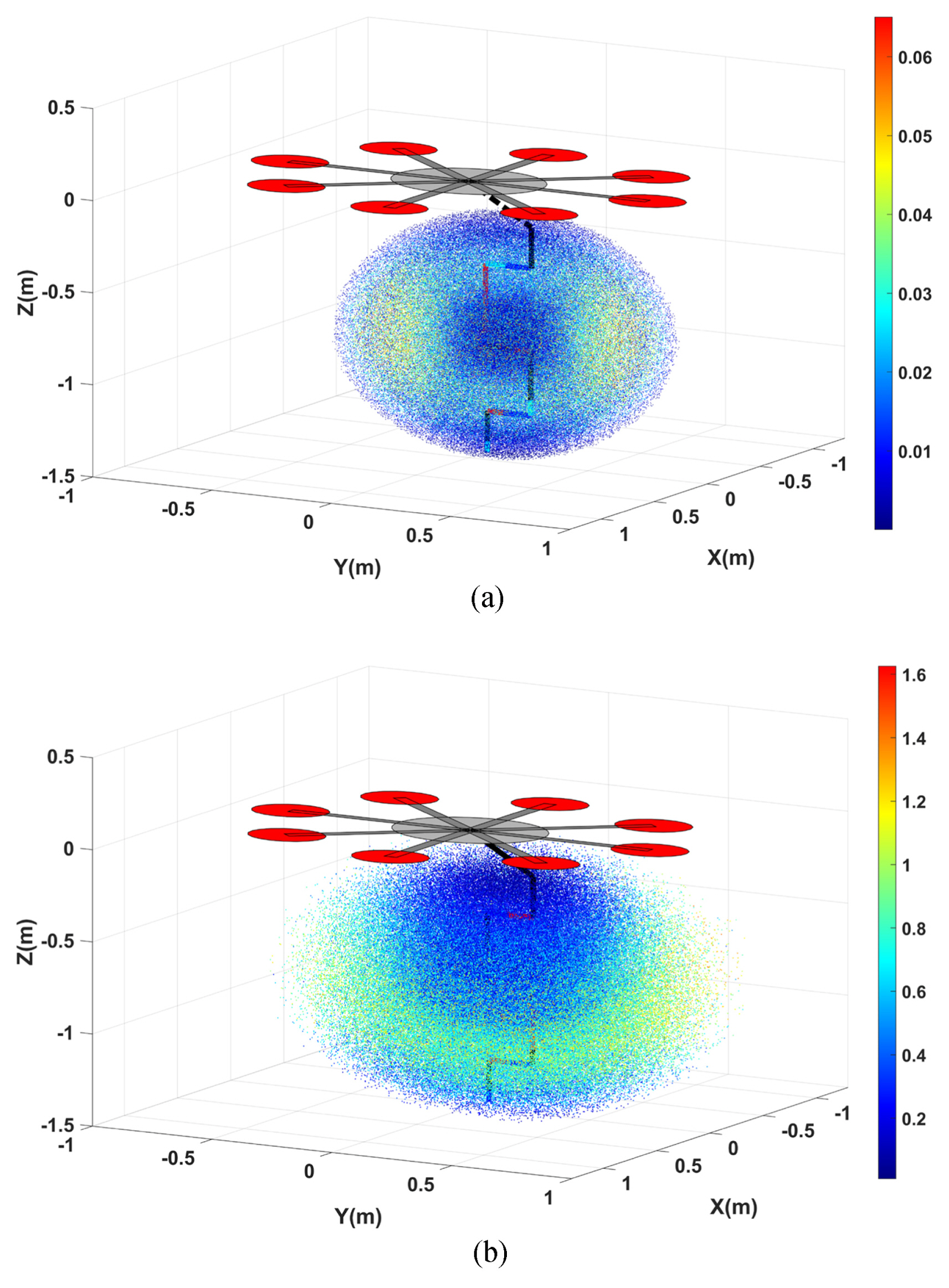
Fig. 4에는 로봇팔만 고려하였을 때의 작업공간과 공중플랫폼을 추가하였을 때에 대한 작업공간을 등각뷰로 나타내었다. 등각뷰로 봤을 때에, 공중 플랫폼을 고려하였을 때 얼마나 작업공간이 넓어졌는지 파악하기 어렵다. 따라서 단순히 수치적으로만 나타내면 먼저 y축에 대해서는 -0.551 m ≤ y ≤ 0.774m에서 -0.714 m ≤ y ≤ 1.01 m로 커졌다. x축으로는 -0.754 m ≤ x ≤ 0.568 m에서 -1.011 m ≤ x ≤ 0.839 m 로 각각 넓어졌다. 단, z 축에 대해선 로봇팔의 길이가 변하지 않기 때문에 z축에 대한 작업공간은 동일하다.
Fig. 4에는 작업공간 뿐만 아니라 파란색부터 빨간색까지 색이 포함되어있다. 이 때의 색은 로봇 팔의 말단의 위치에 따른 조작성 지수(Manipulability Measure, MM)에 대한 표시이다. 조작성 지수는 로봇의 특정 자세를 취했을 때, 그 자세에서 특이점 여부를 확인할 수 있는 지표이다[
8]. 이 조작성 지수는 식(2)와 같이 나타낼 수 있다.
여기서 JG(q) ∈ R6 x m은 Geometric Jacobian이며, σi는 Singular Value이다. m은 시스템의 자유도와 관련되어 있으며 로봇 팔만 고려하였을 때에는 m = 7이고, 공중 플랫폼까지 포함하였을 경우에는 m = 10이다. 이 식에서 볼 수 있듯이 조작성 지수는 자코비안행렬의 제곱에 대하여 행렬식을 구한뒤 제곱근을 취하는 형태이다. 이는 다시 자코비안 행렬을 특이 값 분해를 통해 특이값들의 곱으로도 나타낼 수 있다. 결국 이 조작성 지수는 자코비안의 제곱을 역행렬로 만들 수 있는지의 여부이기 때문에, 이 값이 0에 가깝게 될수록 그 때의 로봇 팔의 자세는 특이점에 가까운 자세이다. 따라서 최댓값 기준으로 하였을 때, 로봇 팔만 고려하였을 때보다 공중 플랫폼을 포함시켰을 때 약 0.065에서 약 1.62정도 증가하였으며 약 25배 정도 값이 커졌다.
조작성 지수의 크기로만 분석할 경우에 20만개 데이터 중에 얼마나 많이 특이점 구간이 감소하였는지 분석이 어렵다. 이를 분석하기 위해 식(2)를 식(3)과 같이 나타낼 수 있다.
이 식은 Condition Number라 부르며, 식(2)에서 구하였던 특이 값의 최댓값을 최솟값으로 나눈 형태이다. 이 값은 조작성 지수와는 반대로 값이 커질수록 특이점에 가깝게 된다. 이것을 사용하는 이유는, 특이점을 분석하는데 큰 값일수록 직관적으로 받아들이기 쉽기 때문이다.
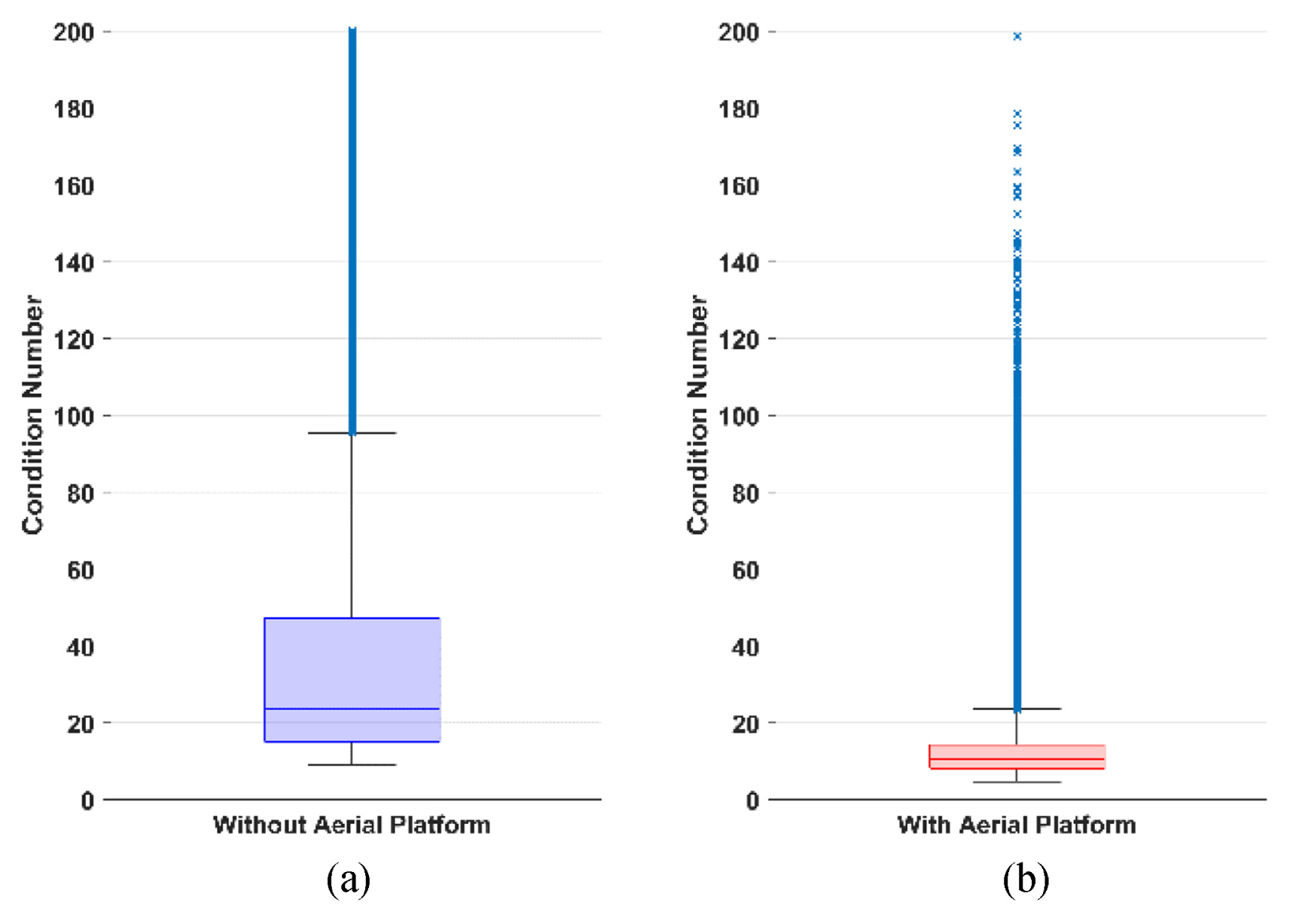
Fig. 5에 조작성 지수의 결과를 Condition Number로 변환하여 이를 Box Plot으로 나타내었다. 이 그래프에서 알 수 있듯이, 공중 플랫폼을 포함할 경우 중앙값뿐만 아니라 상 이상치(Upper Outliers)의 값도 로봇 팔만 고려하였을 때보다 0에 가까운 값을 보인다. Box Plot의 특성상 3사분위가 전체 데이터 셋에서 75%이기 때문에 이미 공중 플랫폼을 포함할 경우, 특이점에서 매우 안정적인 시스템이 된다. 이를 구체적인 수치로 비교하기 위해 공중 플랫폼을 포함하였을 때의 상한 경계(Upper Fence)의 값을 기준으로 하였을 때, 상 이상치의 개수를 확인하였다. 공중 플랫폼을 포함할 경우의 상한 경계값은 약 24.64이며, 이 때의 이상치의 개수는 14,277개이다. 이 경계 값을 로봇팔만 적용하였을 때로 적용하면 이상치의 개수는 97,092개가 된다. 따라서 공중 플랫폼을 고려하였을 때, 이 시스템은 약 6.8배 정도 더 특이점에서 안전한 시스템이 될 수 있다.
3. 공중 플랫폼의 추력 분석
이 시스템은 케이블에 매달린 구조로 인해 로봇 팔의 움직임으로부터 발생하는 무게중심의 이동 및 바람과 같은 외란 등으로 인해 진자 운동이 발생한다. SAM 시스템은 이를 완전 구동형 멀티 로터 구조의 프로펠러 기반 추진 시스템 메커니즘을 활용하여 진자 운동을 감쇠함으로 보상한다. 그와 동시에 작업 방향을 조정하기 위해 요()에 대한 제어를 수행한다. 이 장에서는 제어기를 바탕으로 안정적인 공중 조작 작업에 필요한 추진 시스템의 요구 사양을 분석한다.
SAM 시스템의 경우 고정 틸트 로터 타입의 완전 구동형 멀티로터 방식을 활용하였다[
9-
13]. 8개의 프로펠러 기반 추진 시스템이 각각 다른 방향으로 추력 벡터를 생성할 수 있도록 고정 배치되었다(
Fig. 3(a) 참조). 이 추력 벡터들의 조합을 바탕으로 모든 방향의 힘 F와 토크 T, 렌치 W = [F
T T
T]
T를 생성할 수 있다. 이때 SAM의 각 추력 벡터의 방향은 목표 렌치에 따라 추력의 크기를 균일하게 발생할 수 있도록 최적화 과정을 거쳐 배치되었다[
3].
추진 시스템 제어를 위해 렌치와 추력 사이의 수식을 기구학을 통해 도출하였다. 각 추력 크기 벡터 U = [u1 u2 ... u8]T와 렌치 사이의 관계는 식(4)를 따른다.
여기서 A는 Control Allocation 행렬을 의미한다. 이 행렬을 통해 상위 제어기로부터 구한 목표 W로부터 요구되는 추력의 크기를 계산할 수 있다[
14]. A은 모터의 위치, 방향에 따라 달라지는데 이를 반영하여 식(5)와 같이 나타낼 수 있다.
여기서 ti, 는 pib각각 i번째 모터가 발생하는 추력의 방향을 나타내는 단위 벡터와 모터의 플랫폼 좌표계 기준 위치벡터를 의미한다. k = (-1)i+1 ζ로 나타난다. 이때 ζ는 프로펠러 기반 추진 시스템이 발생하는 힘과 모멘트 사이의 비율이다. 프로펠러가 회전하면서 그 반대 방향으로 모멘트가 발생하는데 그 부호를 (-1)i+1로 나타낸다.
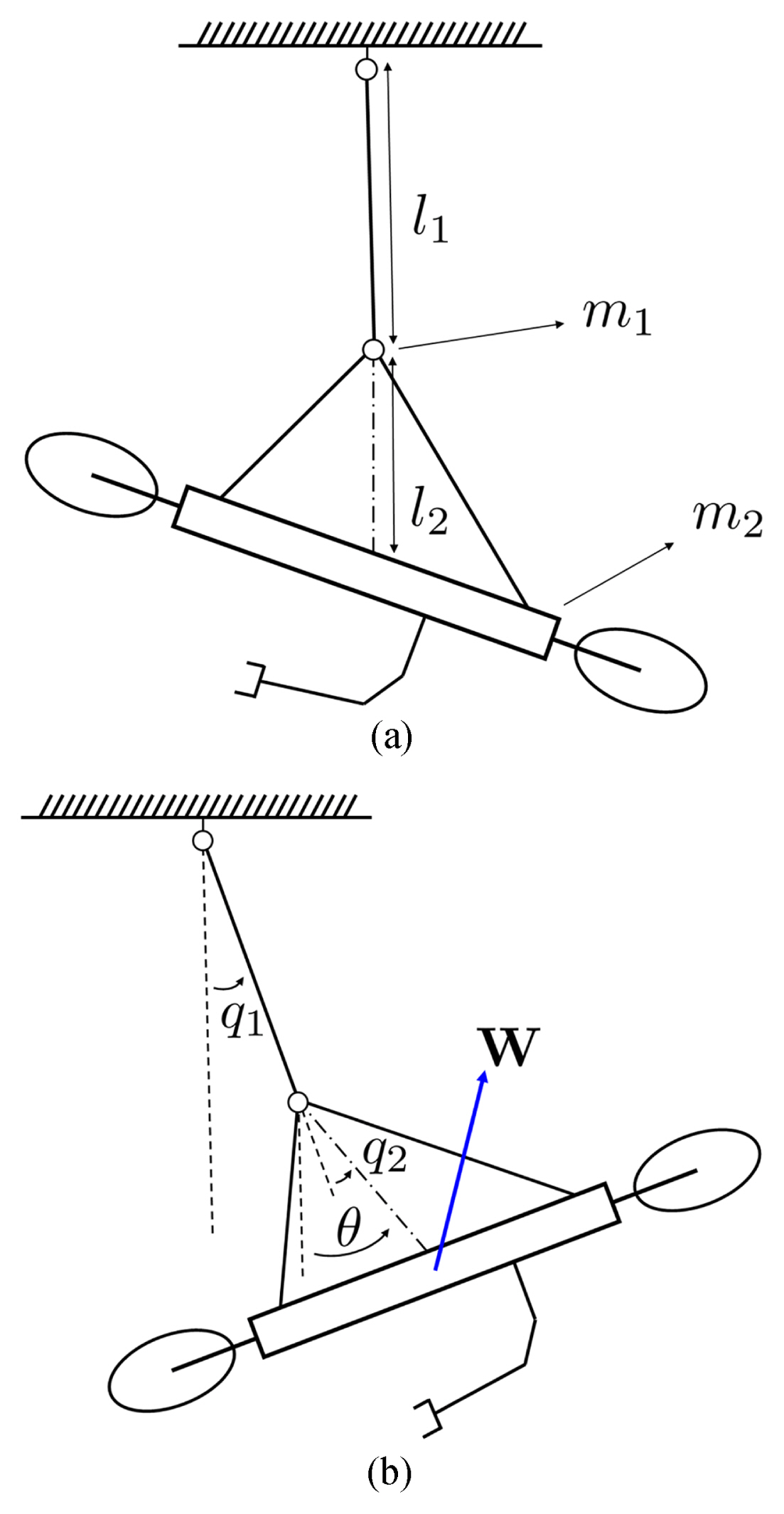
SAM 시스템의 동역학 방정식은 이중 진자의 운동 방정식으로 나타낼 수 있다. 먼저 기울인 상태의 공중 플랫폼의 모습을
Fig. 6과 같이 2D 시스템으로 묘사했다. 여기서 m
1, m
2는 첫 번째 및 두 번째 진자의 질량을 의미하며, l
1, l
2는 각 진자의 길이를 나타낸다. 이때 일반화 좌표는 q = [q
1θ]
T이며 θ = q
1 + q
2 로 정의한다. 이를 바탕으로 라그랑주 동역학 방정식을 다음과 같이 나타낼 수 있다.
여기서 M, C, G는 각각 관성, 코리올리 및 원심력, 중력에 해당하는 항이며, τ는 시스템에 가해지는 외력을 의미한다. 추진 시스템에 의해 발생하는 W를 통해 시스템의 진자 운동을 감쇠할 수 있다. 시뮬레이션은
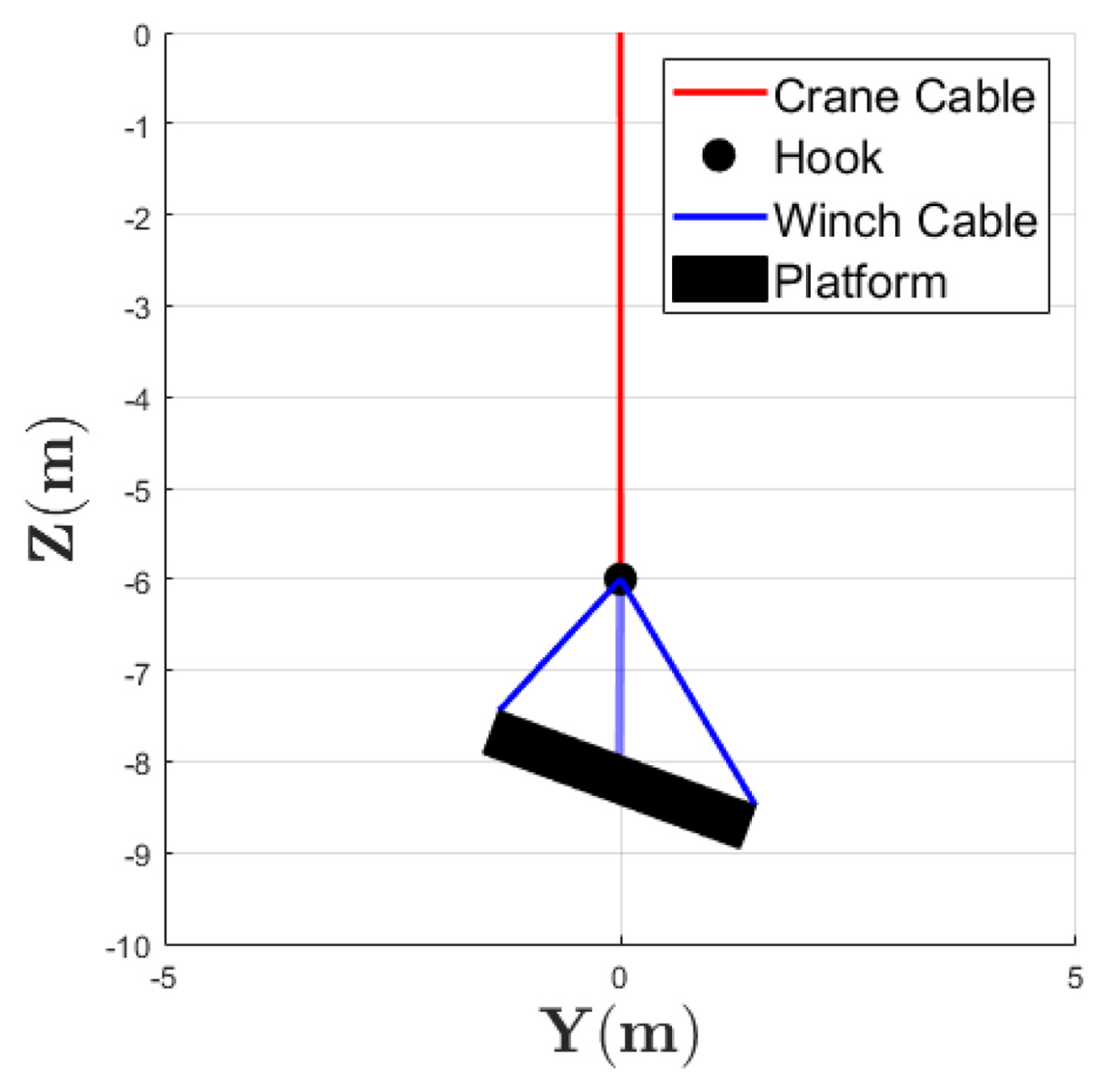
Fig. 7과 같이 구성되었다. W
des = -DV 로 병진 및 회전 속도 벡터 V에 대하여 감쇠행렬 D로 감쇠 제어기를 구성하여 목표 렌치를 도출하였다. 이를 발생시키기 위한 추력 입력 U는 식(10)의 2차 계획법(QP) 최적화 문제를 통해 도출하였다.
Control allocation 행렬과 U
min, U
max로 설정한 제약 조건을 바탕으로 OSQP 솔버를 활용해 목표 렌치에 대하여 최적의 추력값을 도출하였다. 플랫폼이 측면 작업을 위해 -20도로 기울어져 있다고 가정하고, q
0 = [5
o 5
o]
T를 초기값으로 한 뒤 시뮬레이션을 수행하였다. 이 때, 시스템은 중력에 의해 유도된 초기 진자 운동을 시작으로, 추진 시스템의 추력에 의해 점차 감쇠되는 움직임을 보이게 된다. 사용된 파라미터 값과 감쇠 행렬은
Table 2에 정리되어 있다.
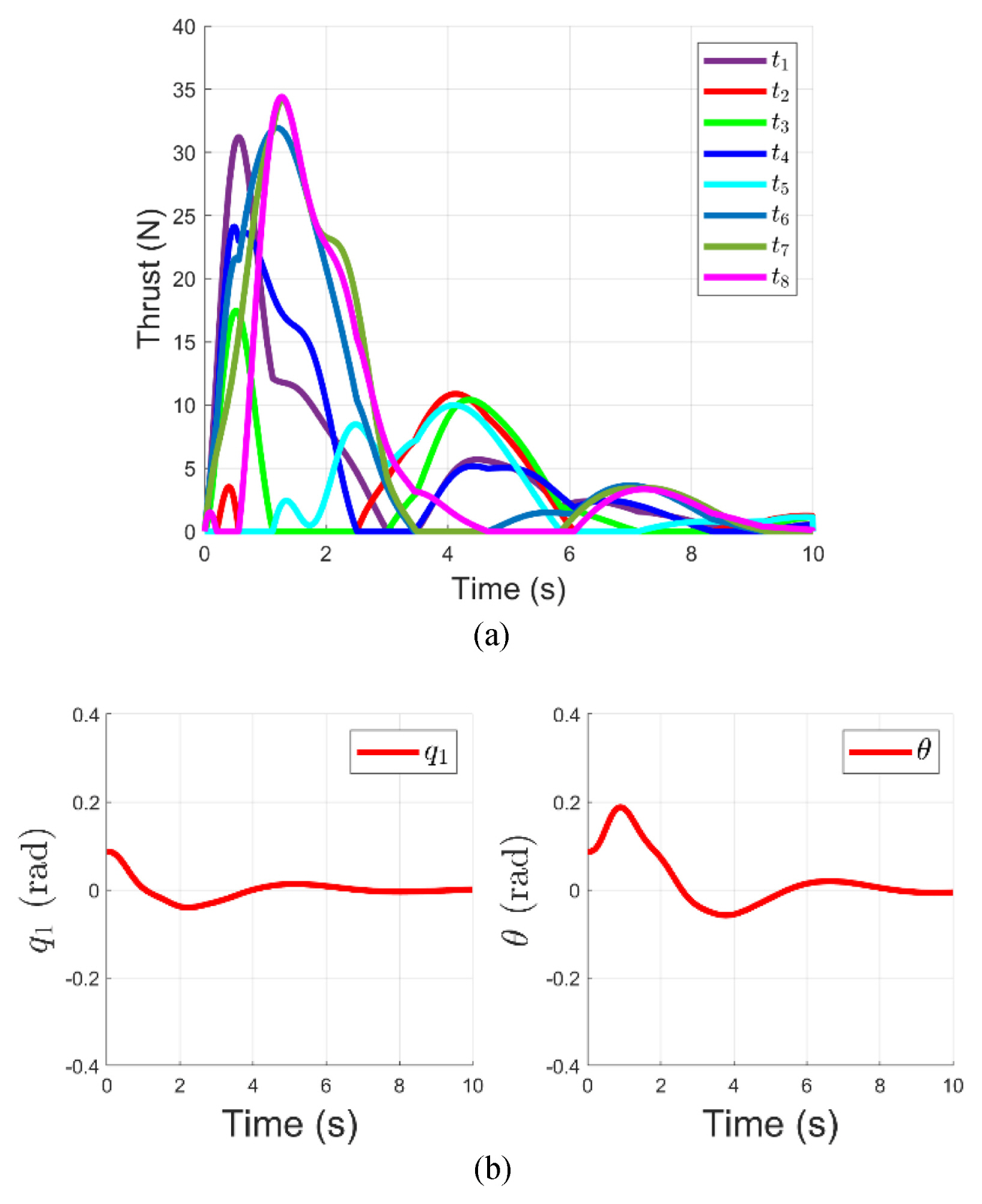
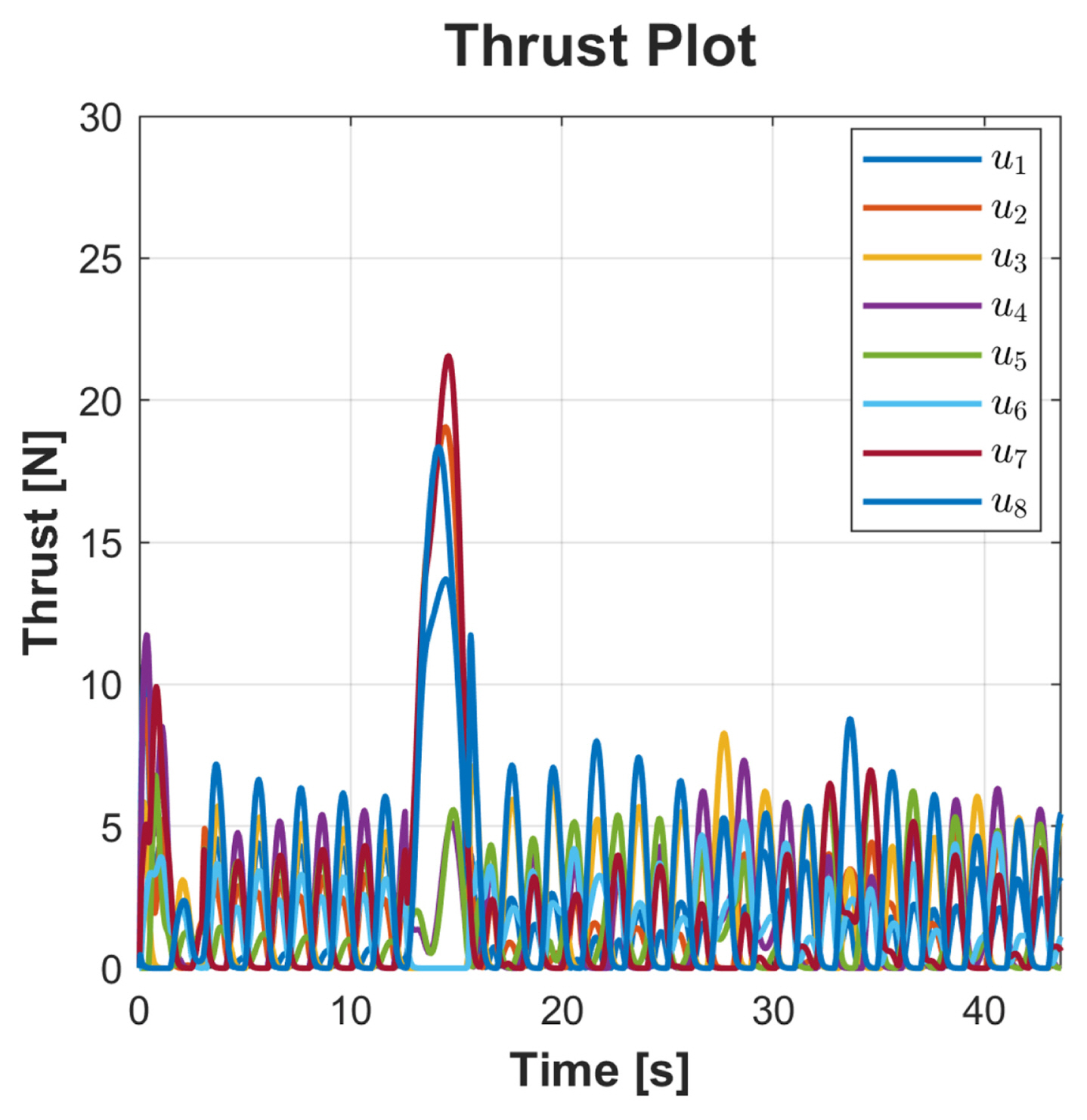
Fig. 8은 시뮬레이션 실험의 결과를 보여주고 있다.
Fig. 9(a)는 감쇠 제어 중 W
des를 발생시키기 위해 각 추진 시스템이 발생시킨 추력 데이터를 나타내고, 8(b)는 q
1과 θ에 대한 플롯이다. 10초 동안의 시뮬레이션 결과 약 1.7초 부근에서 최대 추력으로 34.4 N이 발생했음을 확인할 수 있다. 이를 고려하였을 때 각 추진 시스템이 최대 40 N 이상의 추력을 발생시킬 수 있다면 기울임 작업 중 안정적으로 공중 플랫폼을 제어할 수 있다.
4. 실험 및 검증
제안한 이 시스템의 성능을 실험적으로 검증하기 위해 MuJoCo 시뮬레이터를 사용하였으며, 시스템의 동역학제어를 위해 RBDL (Rigid Body Dynamics Library)를 활용하였다. 첫번째 실험은, 앞서 검증하였던 외란에 대해 MuJoCo 환경에서 3차원 시스템에 대한 검증을 수행하며, 두번째 실험은 외란이 있는 상태에서 로봇팔 말단의 모션 수행한다.
4.1 외란 검증 실험
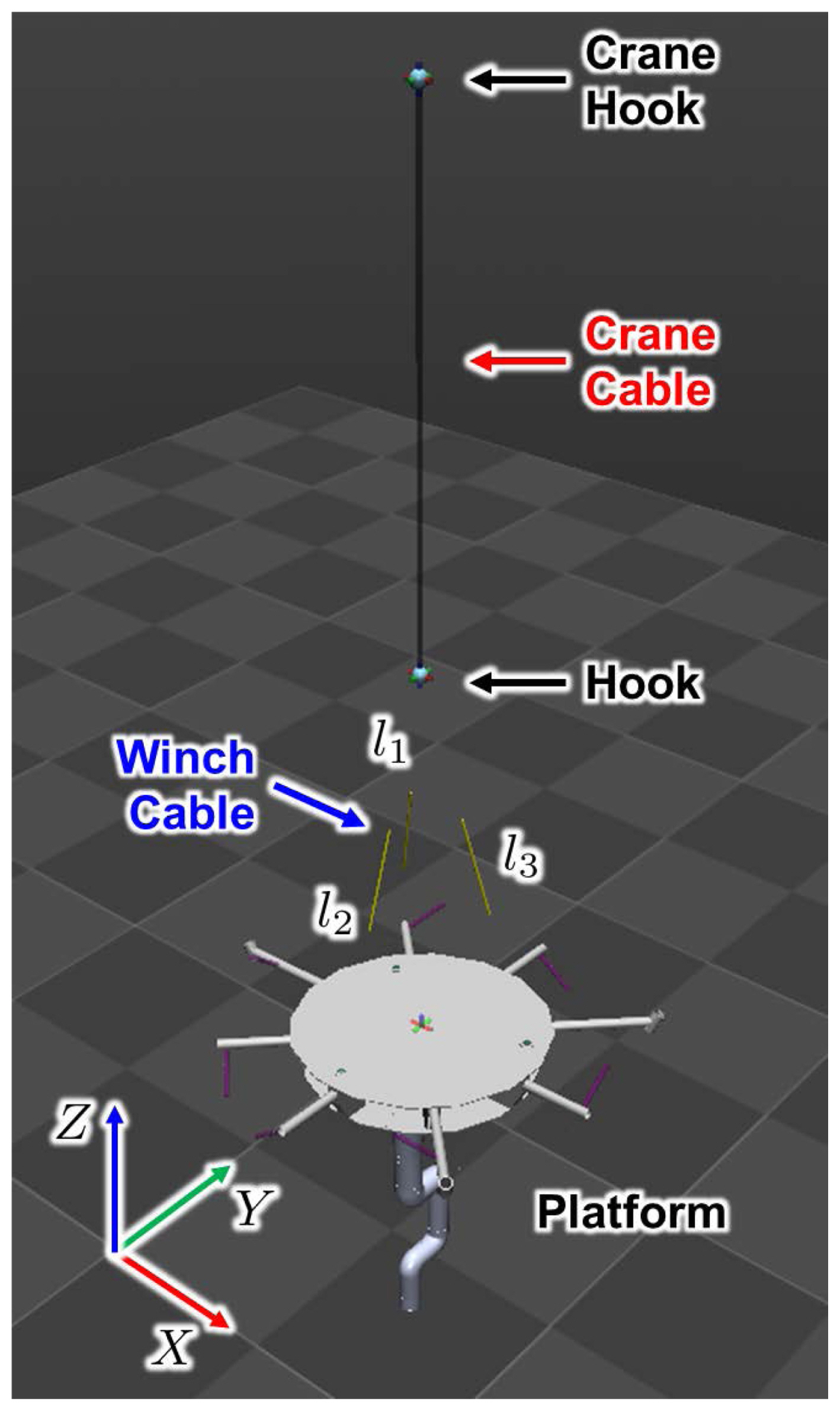
Fig. 9은 공중 플랫폼에 대한 시뮬레이션 모델의 구성을 나타낸다. 본 실험은 두 가지 조건에서 수행되었다. 이 시스템의 전역 좌표계 기준 x축 방향으로 10 + sin t N형태의 외란을 가하였다. 또한 요(Yaw) 방향의 제어를 위해 W
des에 PD 제어기로부터 도출한 τ
des,yaw를 추가하였다. 이 실험에서는 로봇팔의 모든 관절 각도를 0
o로 고정한 상태에서 추진 시스템이 진동 감쇠 효과를 분석하였다.
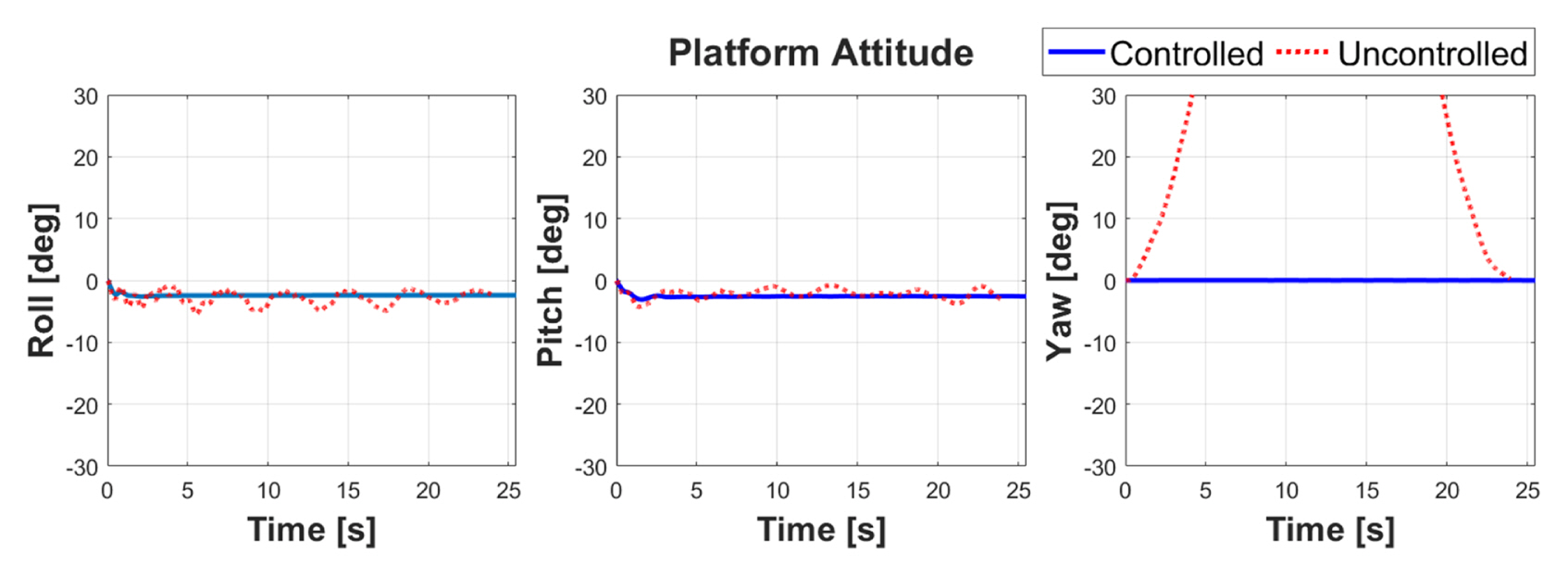
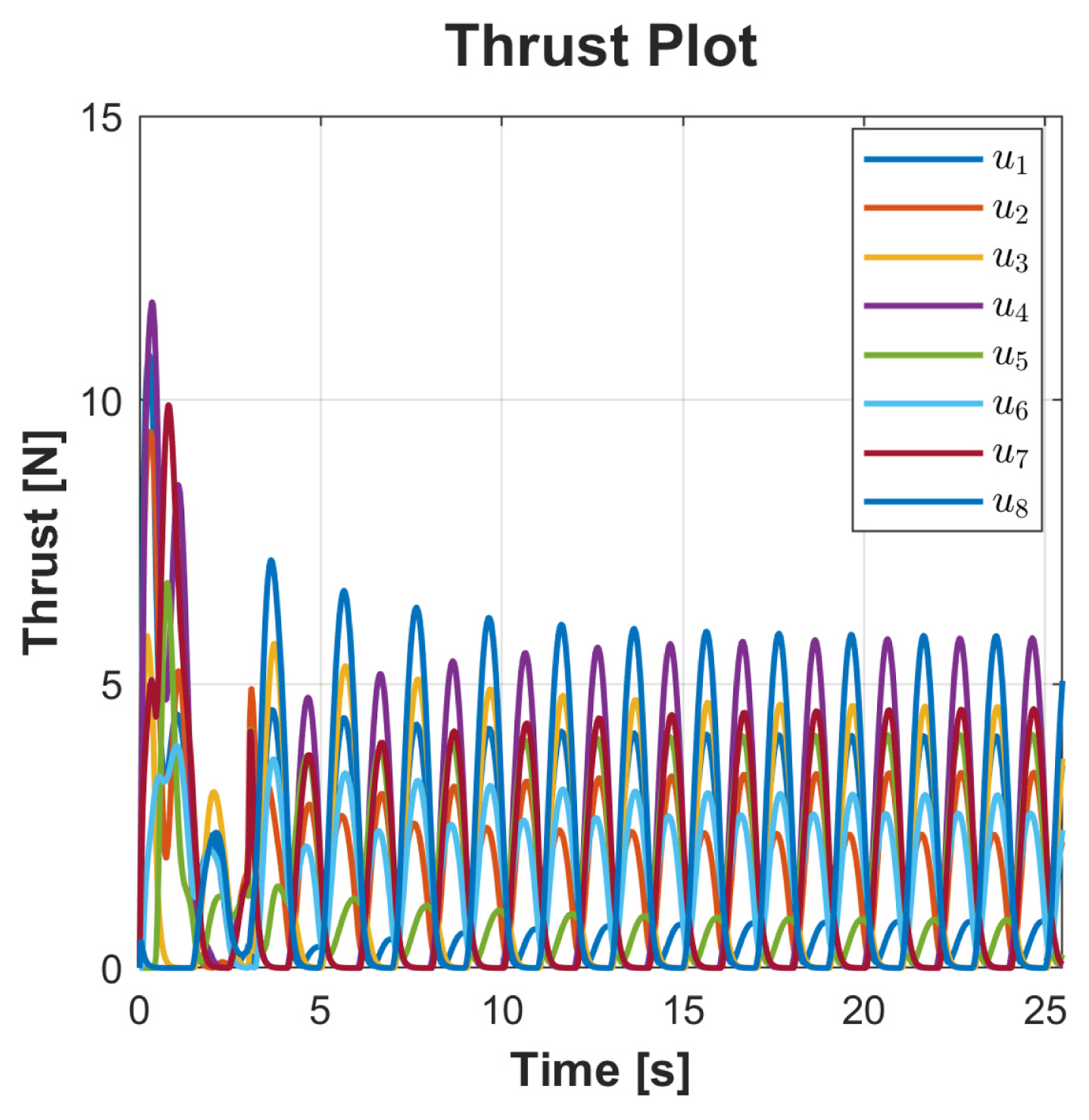
Figs. 10은 추진 시스템의 적용 유무에 따른 플랫폼의 롤(Roll), 피치(Pitch), 요(Yaw) 변화를 비교한 것이고, 이 때 감쇠와 제어를 위해 발생한 추력은 11과 같이 나타난다. 첫번째 행의 플롯은 감쇠 제어기가 적용된 경우로 외란에도 불구하고 롤, 피치, 요가 안정적으로 유지됨을 확인할 수 있다. 두번째 행은 감쇠 제어기를 적용하지 않은 경우로 롤, 피치가 ±5o의 범위로 진동하며, 요 방향은 0
o로 제어가 되지 않는 모습을 보인다. 따라서 이 제어기는 외란에 대응하여 공중 플랫폼의 진동을 효과적으로 감쇠하는데 사용되었다.
4.2 외란 환경에서의 모션 수행
첫번째 실험을 통해, 프로펠러에 의한 추력으로 인해 외란이 보상됨을 보였다. 이 실험에서는 외란 보상과 동시에 이 시스템의 로봇팔의 말단이 모션 수행하는지 검증한다. 이 실험에서는 간단한 모션 검증을 위해 Closed-loop Inverse Kinematics (CLIK)를 적용하였다[
7]. 식(11)-(14)는 C LIK를 구현하기 위한 수식이다. 식(11)를 통하여 로봇 팔 말단의 궤적에 따른 관절의 목표 각도가 생성된다. 식(12)는 여자유도 시스템의 Null-space Projection을 사용하기 위해 사용되는 식이며, 이 연구에서는 식(13)을 사용하였으며 이는 관절들의 기계적인 제한을 넘지않도록 한다. 그리고 식(14)는 식(11)에 대입되어 사용된다.
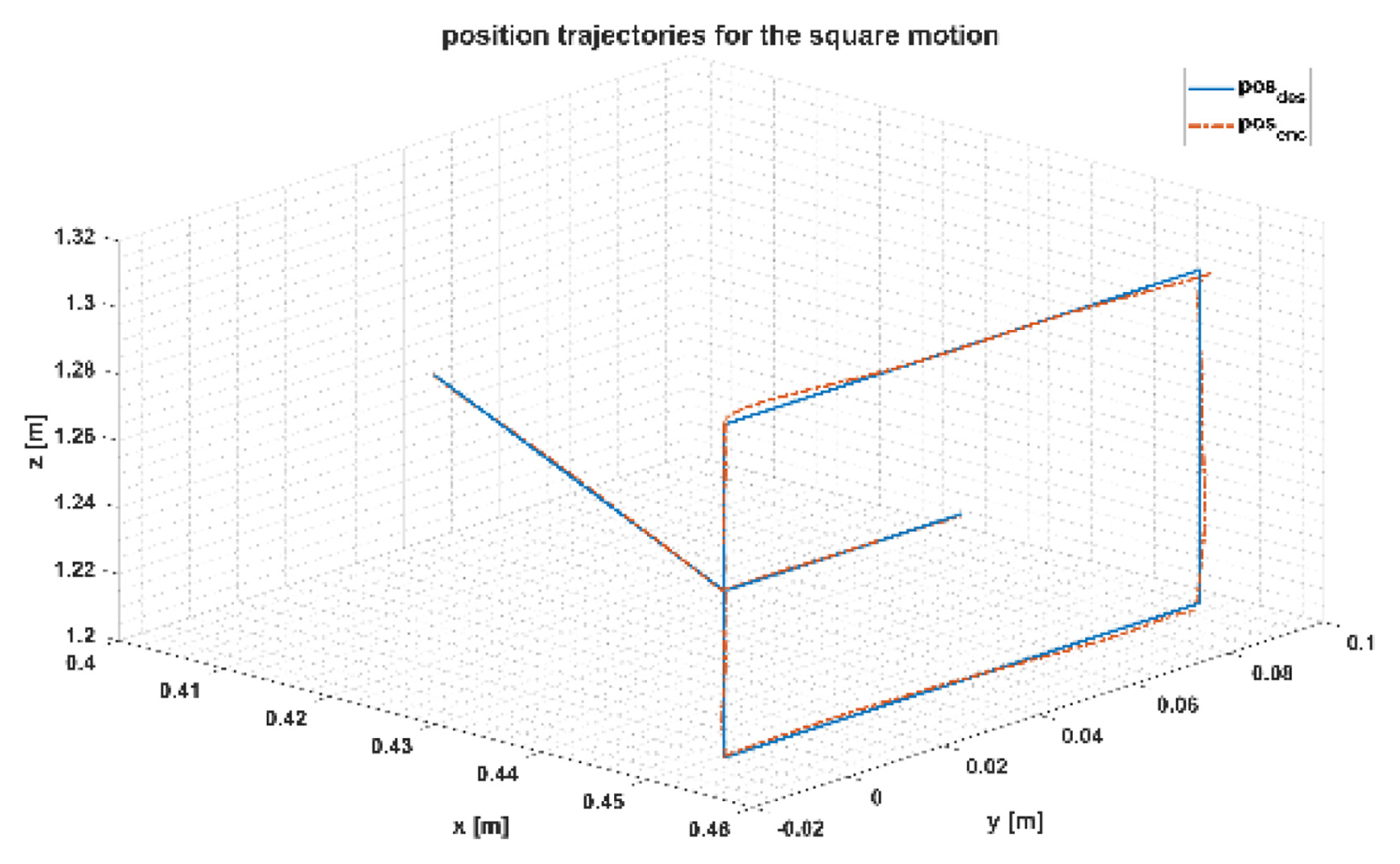
이 실험에 사용된 말단의 궤적은 사각형을 그린다.
Figs. 12와
13에는 이 궤적과 IK의 결과가 나타나있다.
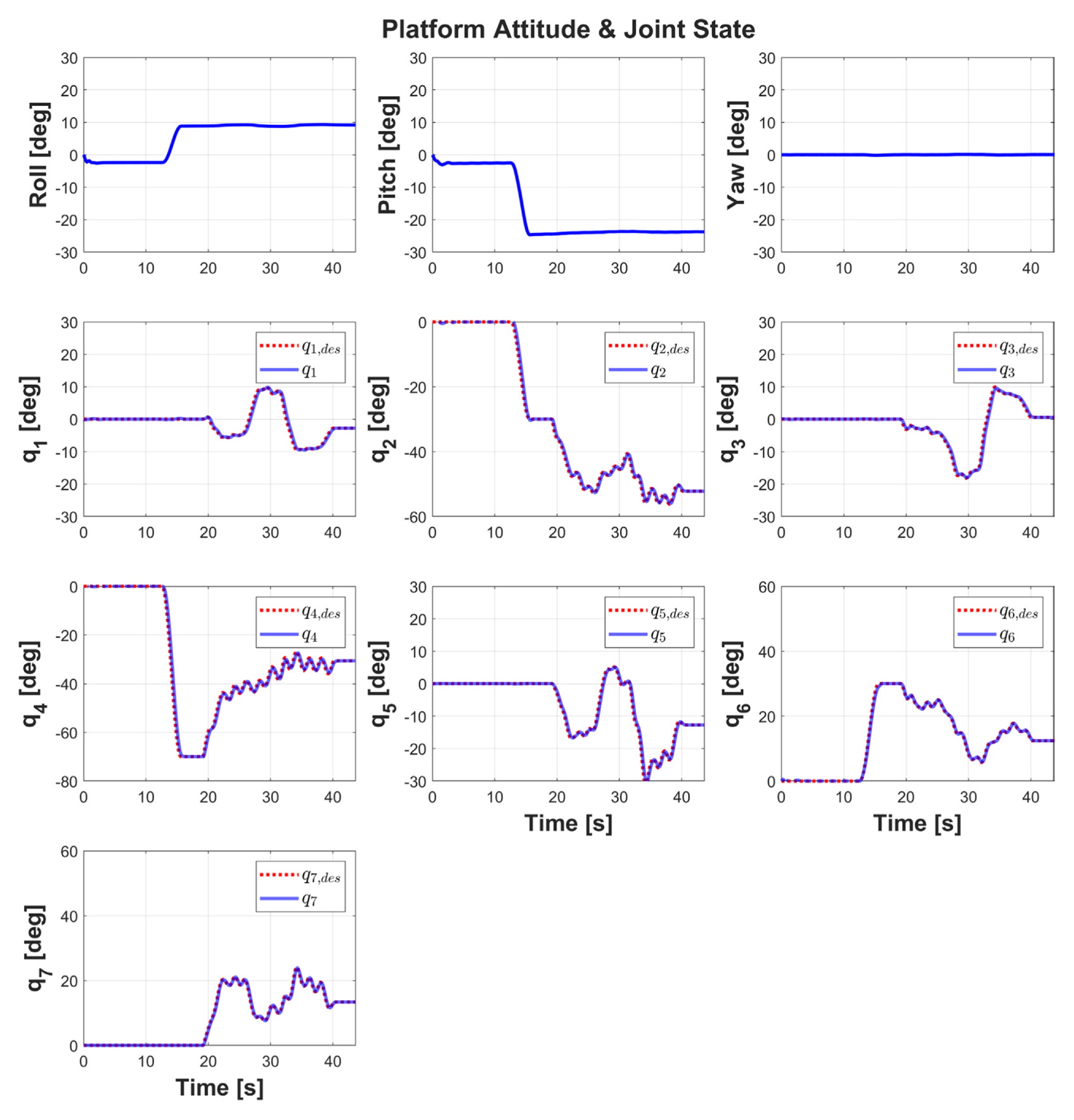
Fig. 13에는 공중플랫폼의 몸에 대한 세 개의 회전각도와 팔 7축에 대해 나와있다. 몸 세개의 회전축에 대해서는 현재 위치를 유지하도록 하였다. 그 이유는 몸통이 움직이지 않은 상태에서 로봇팔 만을 이용하여 궤적을 생성해야 작업 수행이 가능 할 수 있기 때문이다. 이 때에도, 외란을 억제하기 위해 추력을 계속 발생시키고 있으며 그 결과는
Fig. 14에 나타나있다.
이상의 결과를 통해, SAM 시스템의 안정적인 작업을 위해 추진 시스템 기반 진동 감쇠 제어기가 필수적임을 확인할 수 있다. 또한 본 시스템은 수직 하방 작업뿐만 아니라 플랫폼이 기울어진 상태에서도 측면 방향의 작업 수행이 가능함을 실험적으로 검증하였다.
5. 결론
이 연구에서는 기울일 수 있는 현수형 공중 매니퓰레이션 시스템 구현을 위해 시뮬레이션 기반 검증을 수행하고 필요 추력을 산출하였다. 각 프로펠러의 필요한 추력이 약 34 N를 보였다. 추가로 본 시스템이 경험할 수 있는 환경의 불확실성과 바람 등 외란 요소를 고려하여 충분한 추력을 확보하기 위해 약 64 N의 추력을 생성할 수 있는 프로펠러-모터 조합을 선정하였다. 향후 연구로는 실제 시스템을 제작하고 필요한 제어 알고리즘과 측면 작업, 하방 작업을 위한 모션 생성 알고리즘을 개발 및 검증할 계획이다.
FOOTNOTES
-
ACKNOWLEDGEMENT
이 연구는 2025년도 산업통상자원부 및 산업기술기획평가원(KEIT) 연구비 지원에 의한 연구임(No. 2410011582).
Fig. 1Examples of aerial manipulation systems [
1] (Adapted from Ref.
1 on the basis of OA)
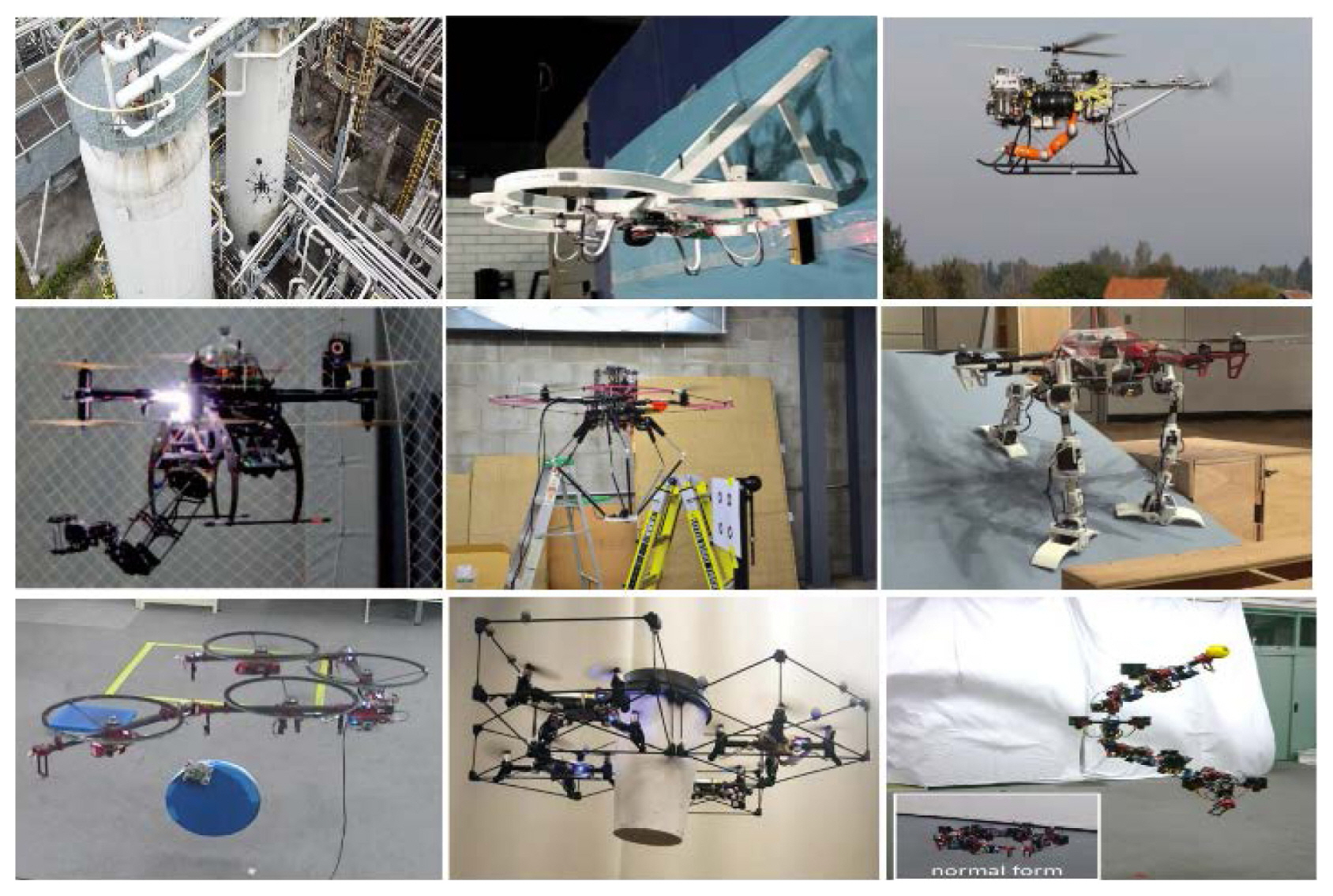
Fig. 2Example of propeller collision with structure before contact in the SAM system

Fig. 3SAM system configuration. (a) is a drone-type aerial platform, (b) is a 7-degree-of-freedom robot arm
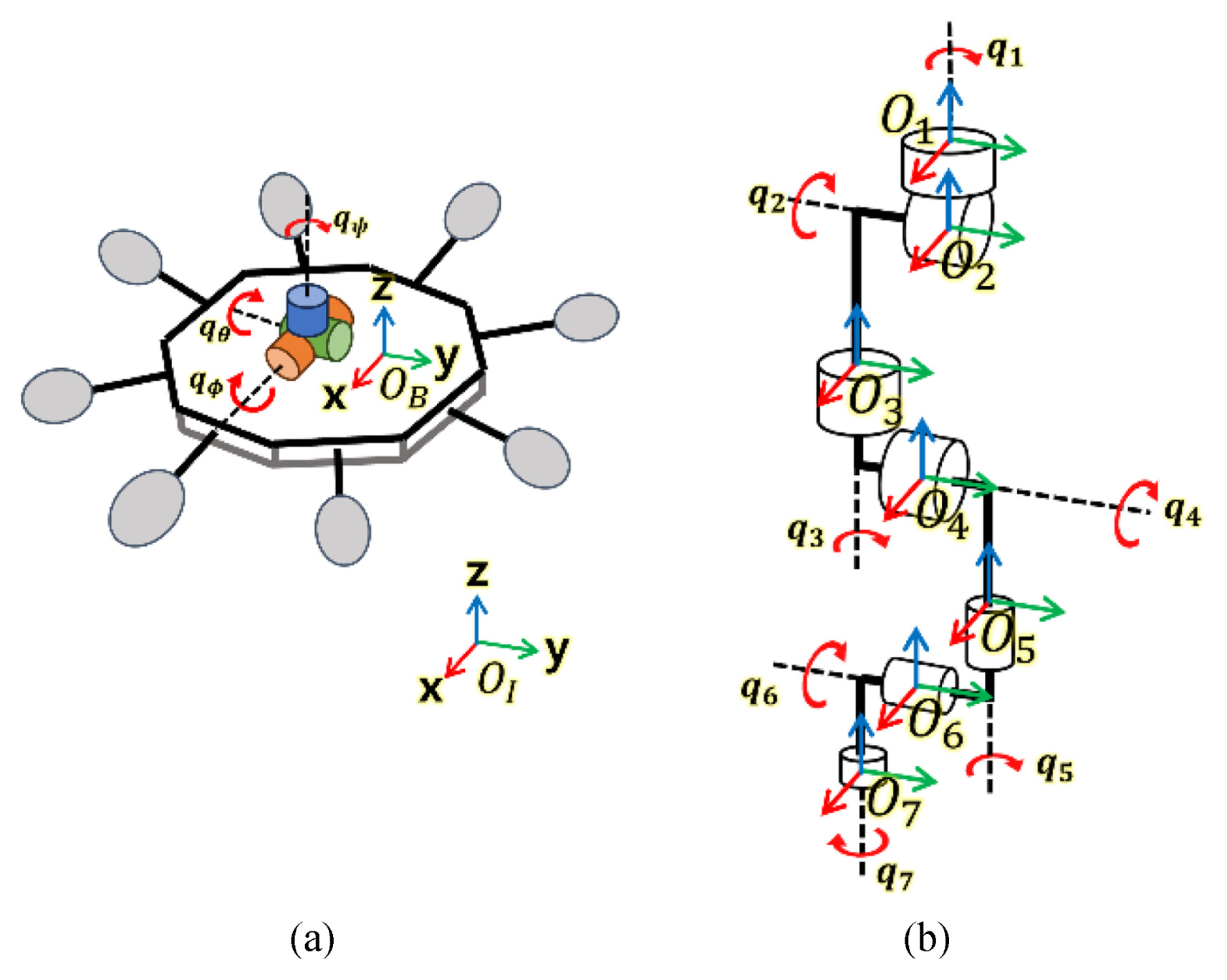
Fig. 4Workspace and manipulability measure values. (a) considering only the robot arm, (b) considering both the robot arm and the aerial platform
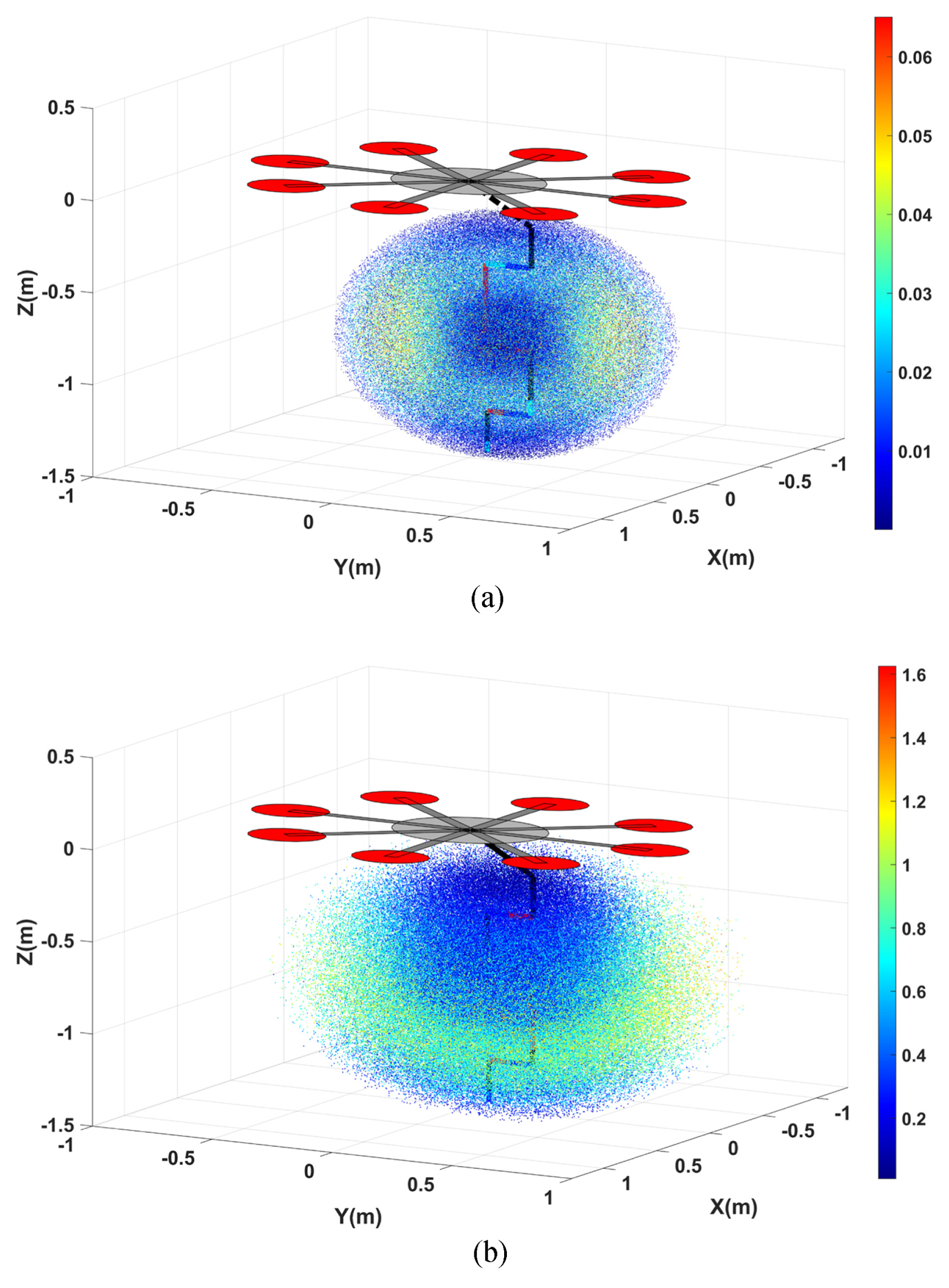
Fig. 5Comparison of system configuration. (a) Robot arm only, (b) Robot arm mounted on aerial platform
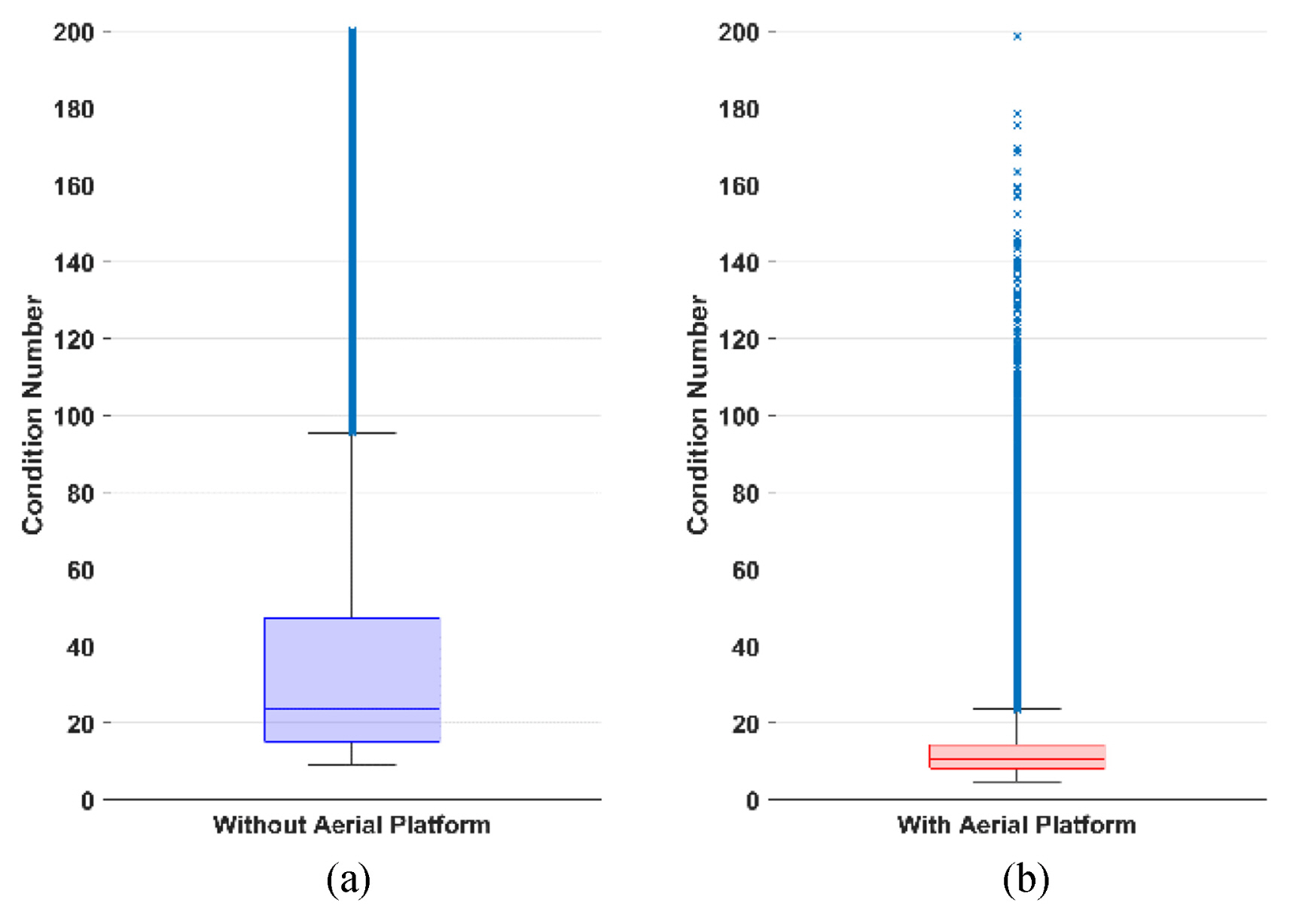
Fig. 6A schematic diagram of SAM in tilt operation (a) system without oscillation (b) joint state and generated wrench description of SAM system while oscillating
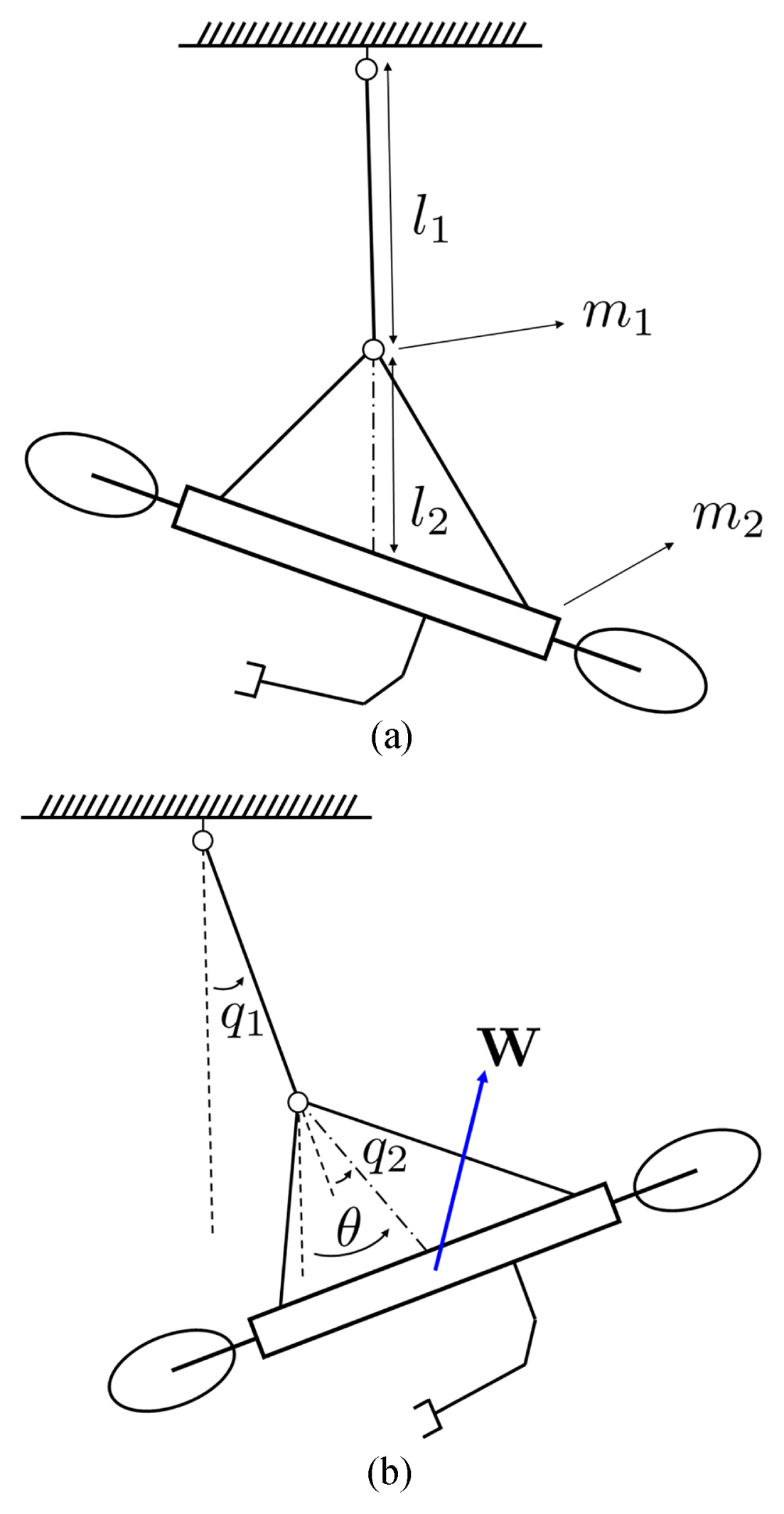
Fig. 7A simulation configuration of 2D tilting SAM model. 11, l2, m1, m2 are described as crane (red line), winch cable (blue line), hook (black circle), platform (black rectangle) respectively. The platform was tilted at an angle of −20 degrees
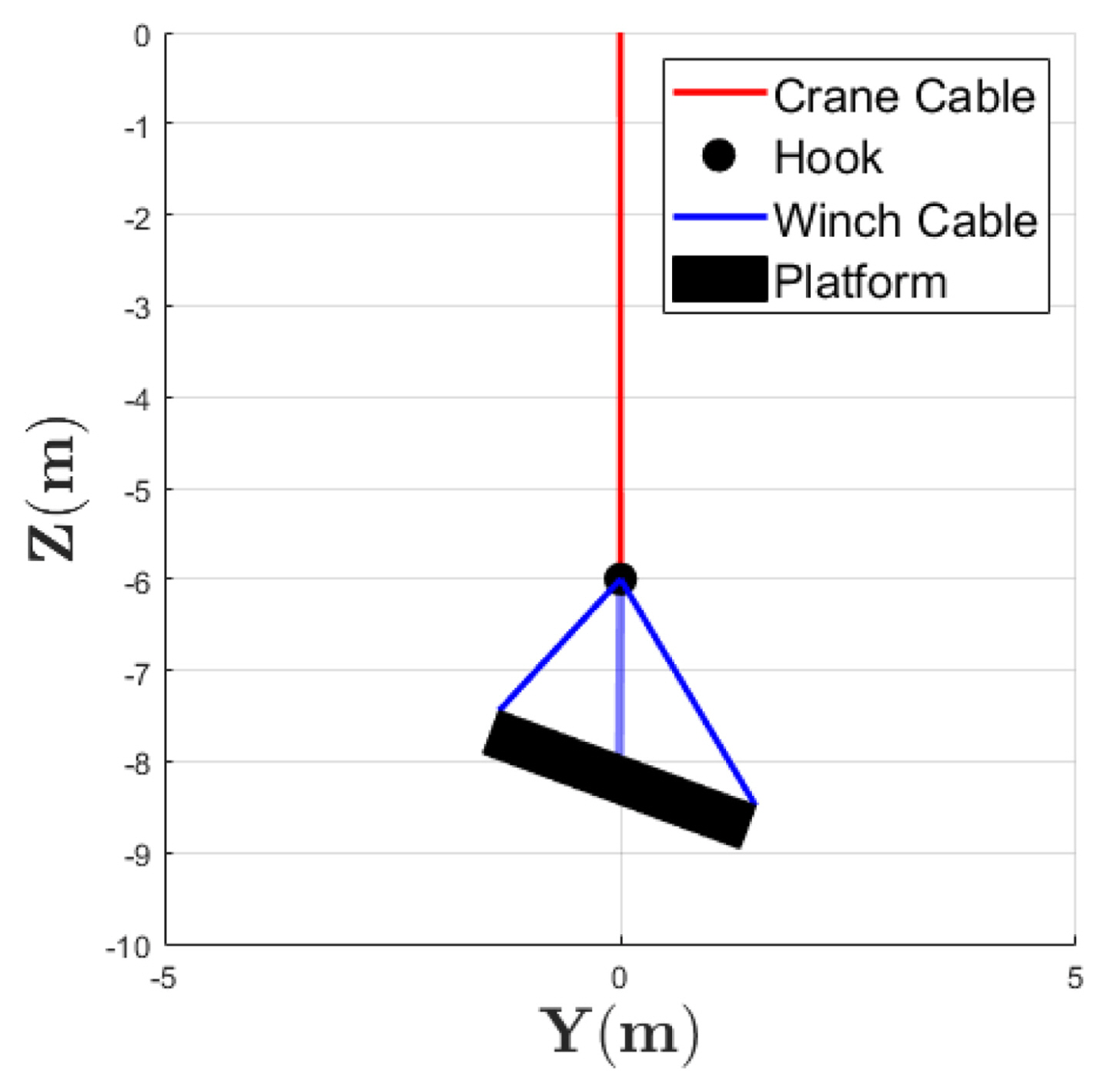
Fig. 8A simulation result of oscillation damping control. (a) Plot of individual thrust data. At 1.7 seconds, t8 (magenta line) shows a peak thrust input with 34.39 N, (b) Plots of q1 and θ angle of system
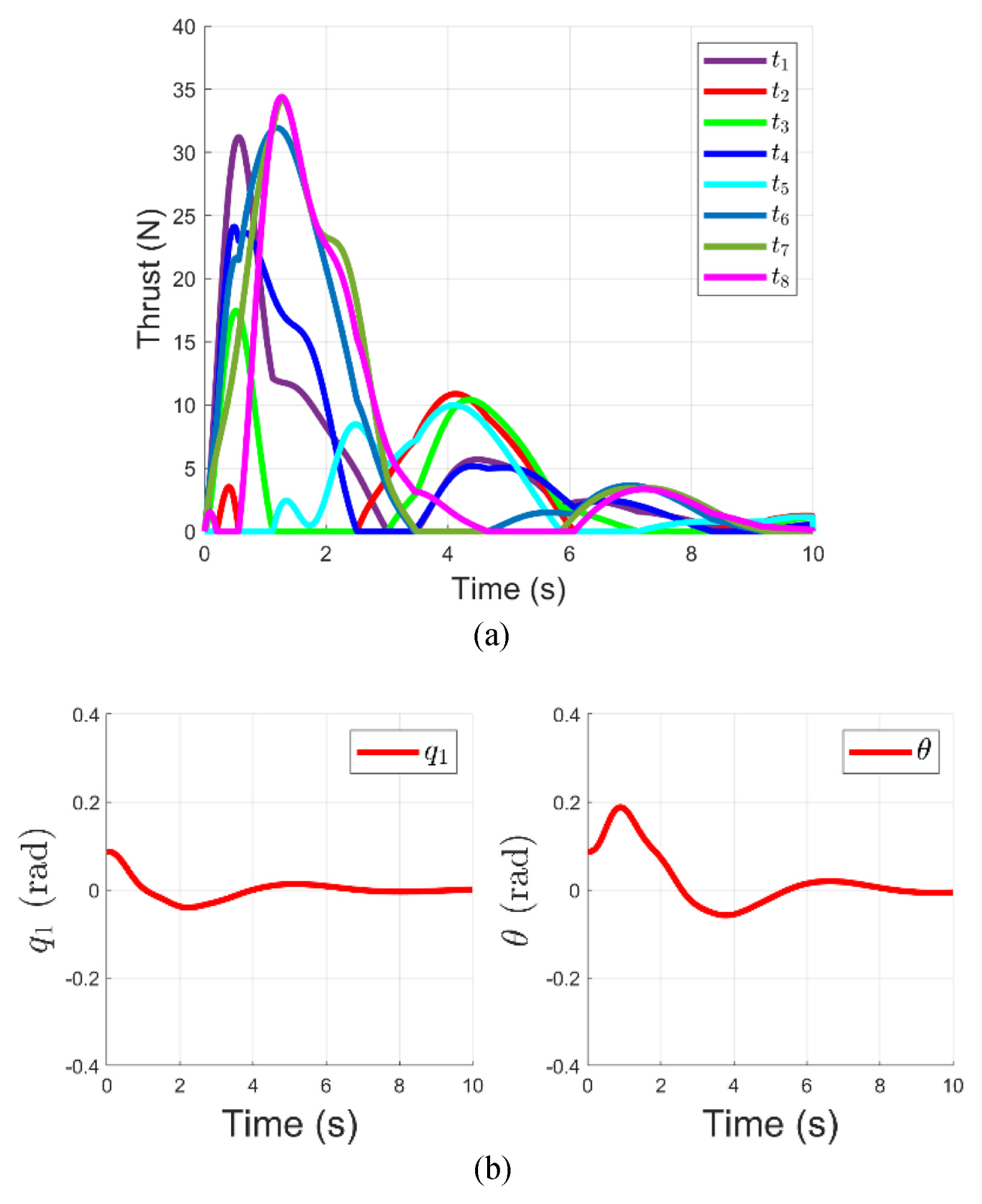
Fig. 9A model configuration for simulation. The controlled lengths of winch cables are represented by l1, l2, l3
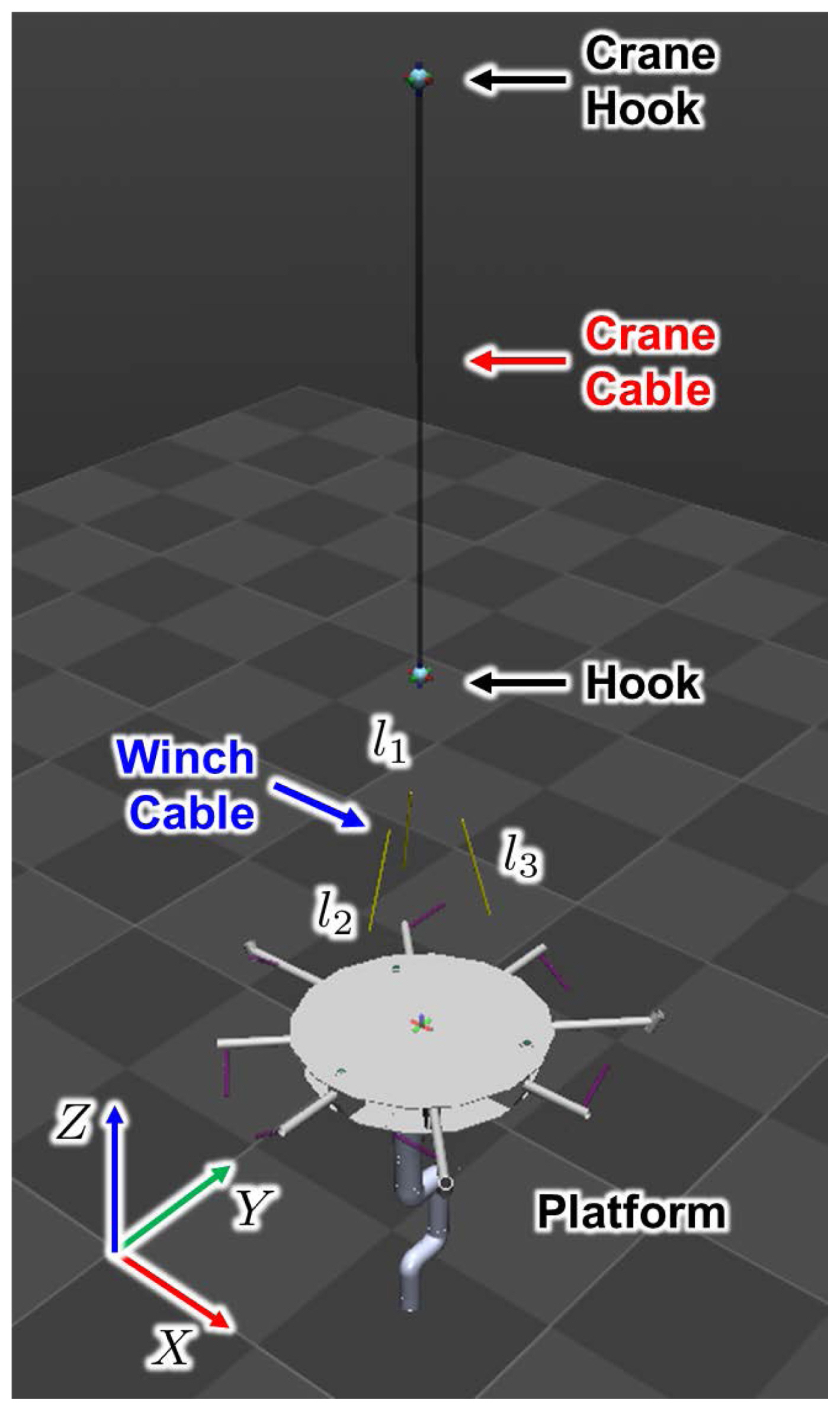
Fig. 10Platform attitude results from experiment 1. The blue solid line is the platform’s attitude under propulsion-based control, and the dotted red line is the uncontrolled attitude data
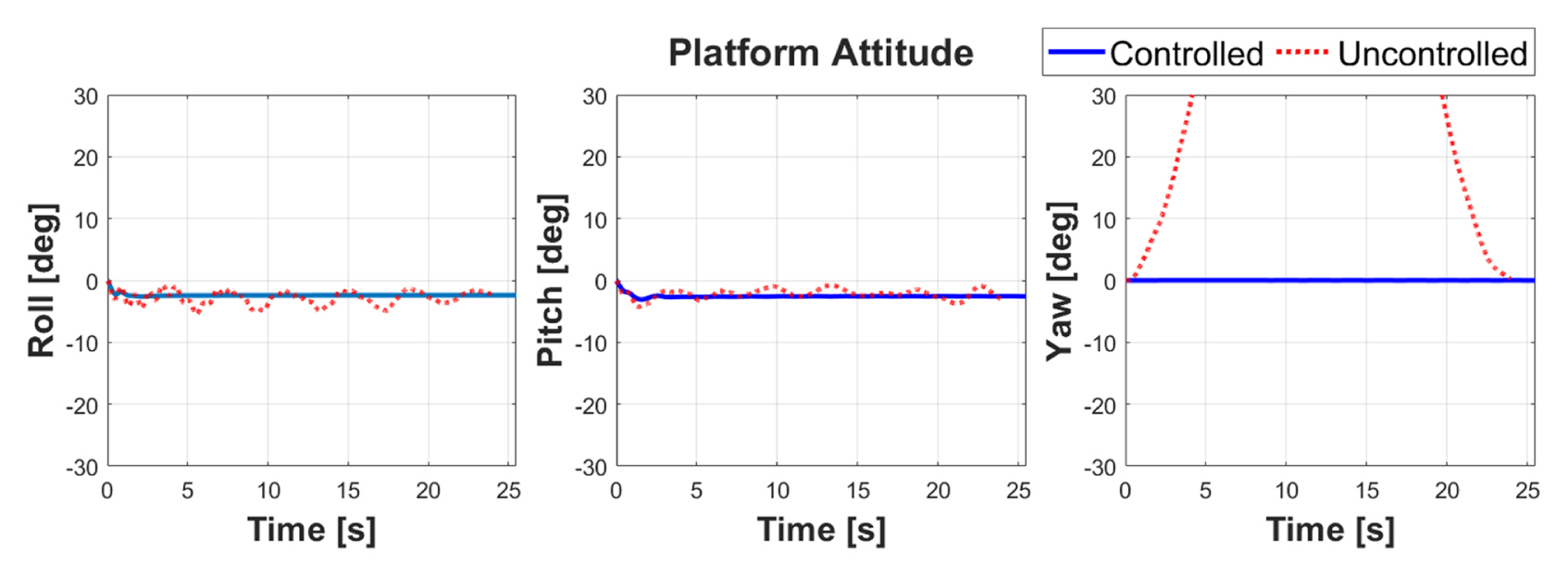
Fig. 11A Plot of U = [u1... u8]T during experiment 1. The thrust variation at the beginning results from the initial condition of the simulation, and the controller then generates thrust inputs for oscillation damping under the disturbance
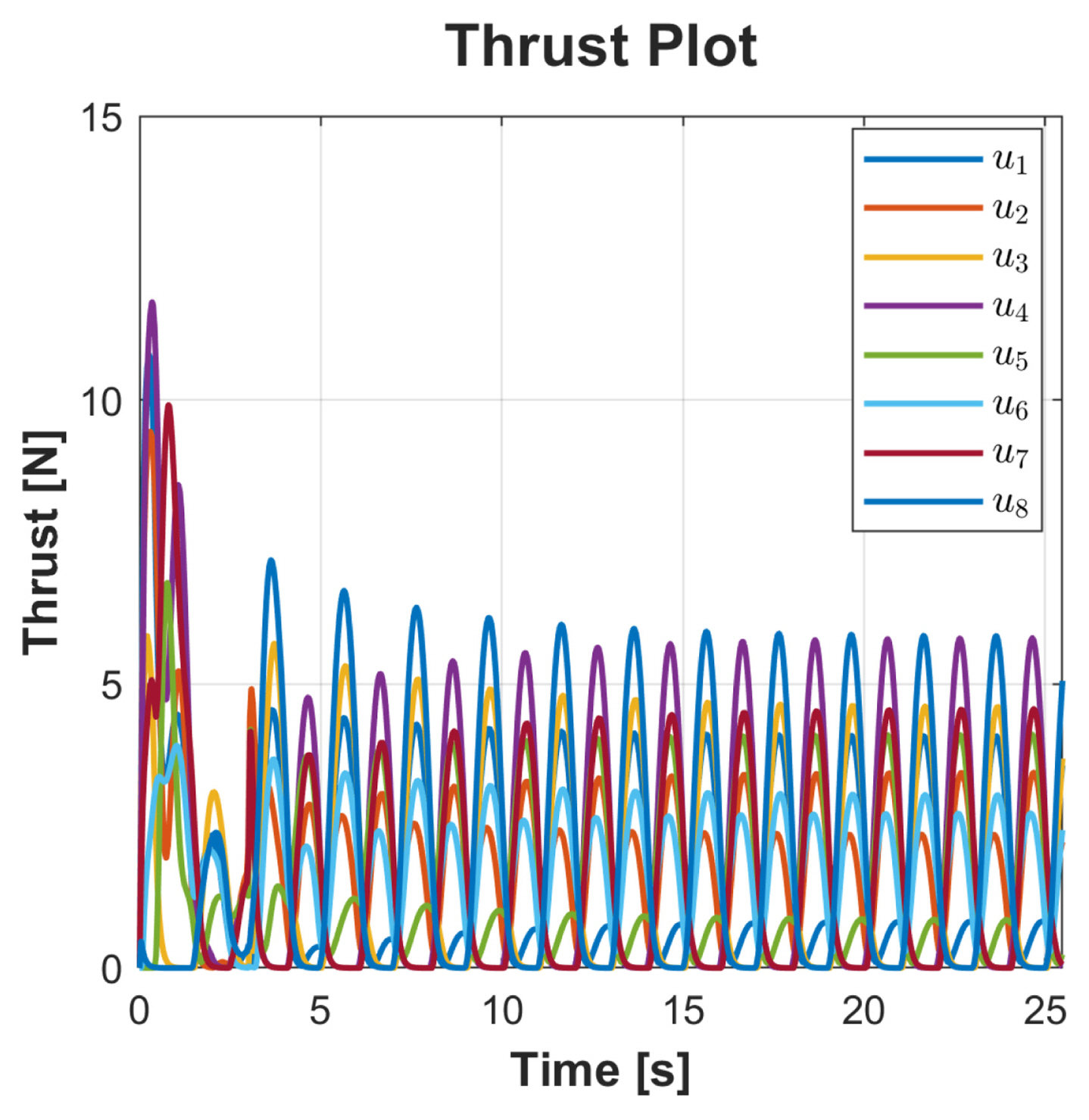
Fig. 12Generation and results of the end-effector’s square motion
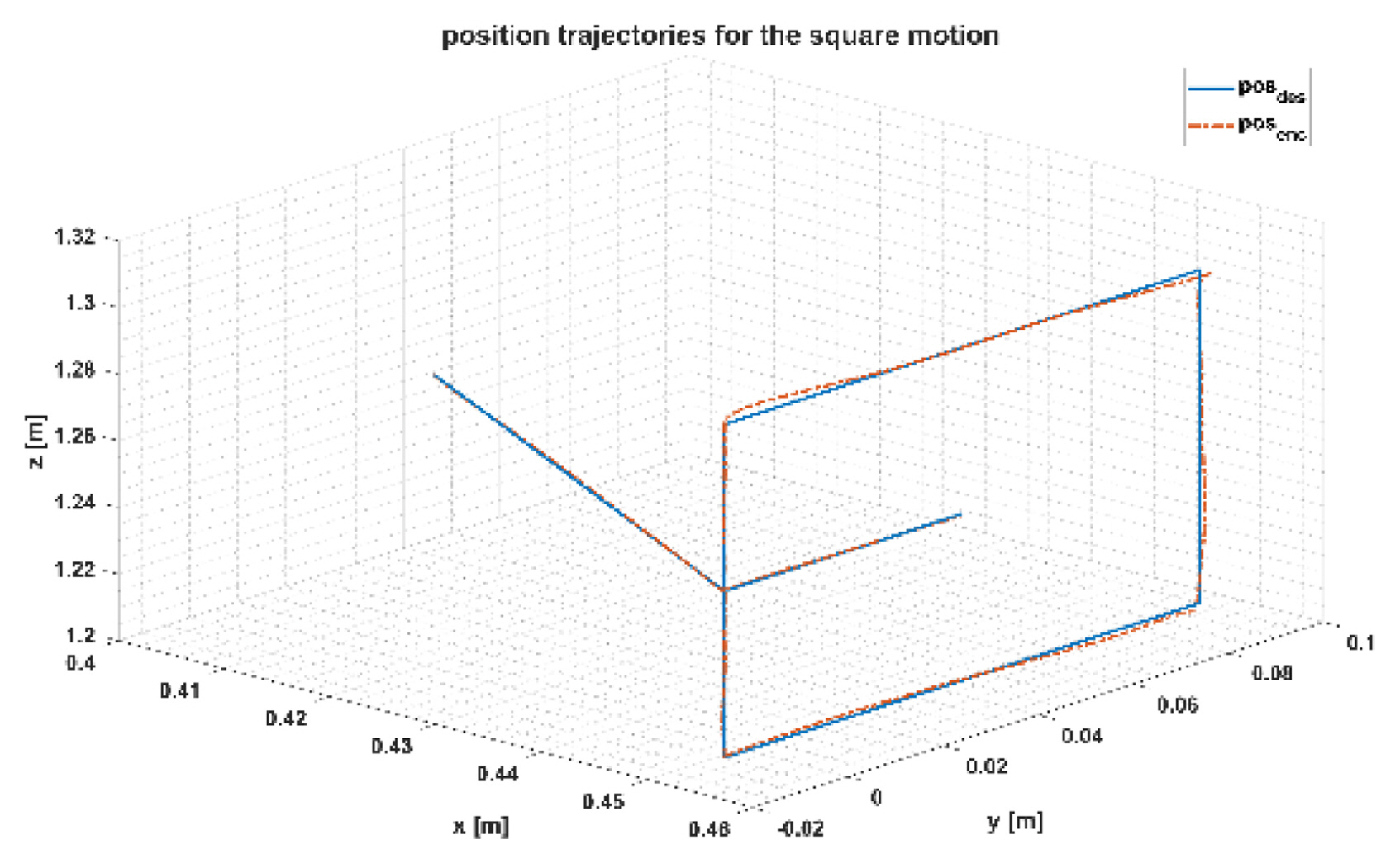
Fig. 13Inverse kinematics results for the end-effector’s square motion using CLIK
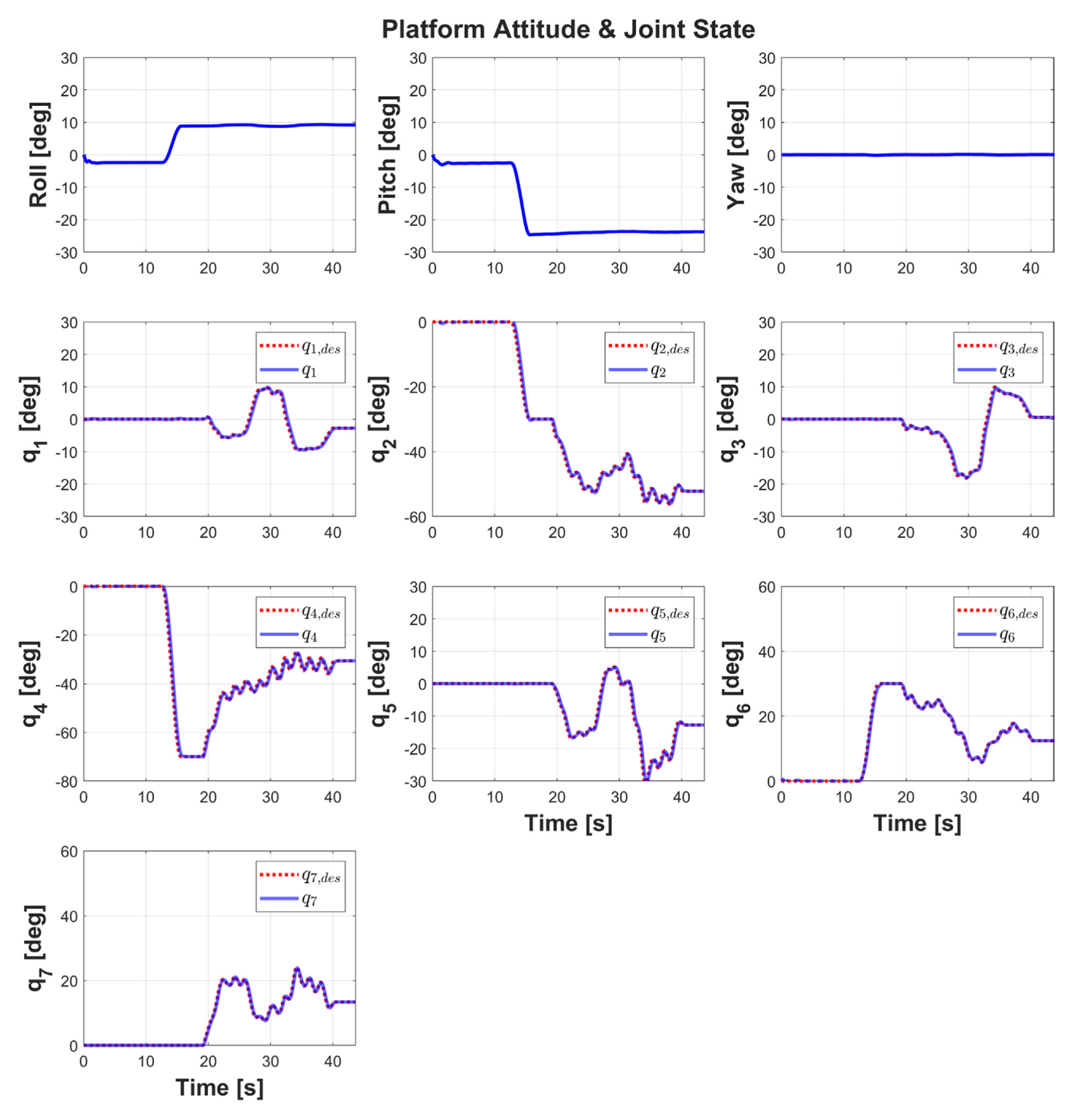
Fig. 14A Plot of U = [u1...u8]T during the experiment 2. During the oscillation damping, around 12–15 s, thrust inputs are generated while the winch cable lengths are controlled to change the platform attitude
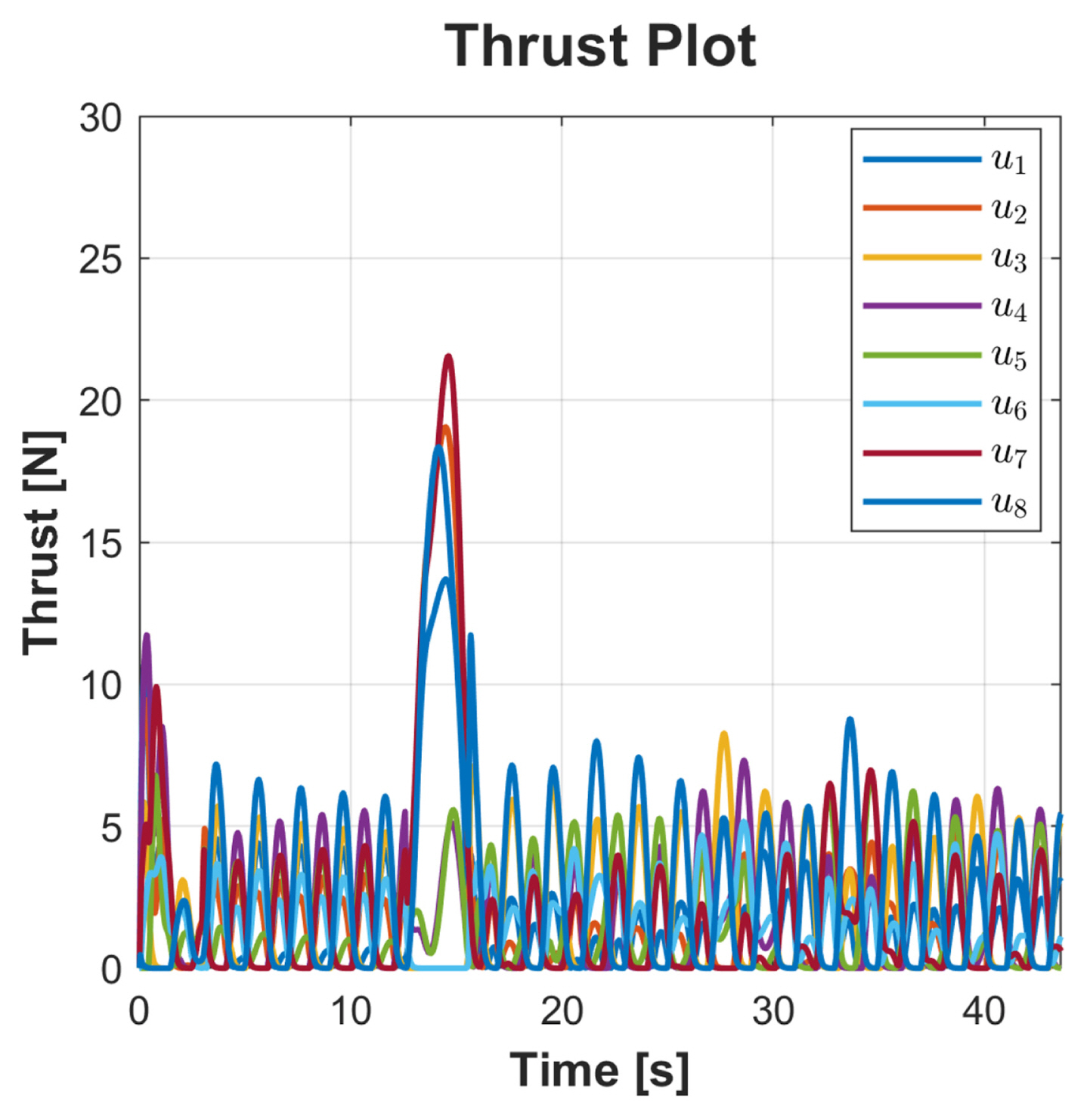
Table 1Kinematic parameters of aerial manipulation system
Table 1
|
Joint |
Range of motion [degree] |
Position vector [mm] |
|
qψ
|
±20 |
- |
|
qθ
|
±20 |
- |
|
qφ
|
±20 |
- |
|
q1
|
±175 |
p1B=[-92.05,221.9,-237.5]
|
|
q2
|
p21=[0,-109.27,-221.47]
|
|
q3
|
p32=[0,-83.2,-373.02]
|
|
q4
|
p43=[0,115.61,-76.94]
|
|
q5
|
p54=[0,73.68,-265.54]
|
|
q6
|
p65=[0,-114.3,-84.47]
|
|
q7
|
p76=[0,-67.54,-166.04]
|
|
pE7=[0,0,-60.5]
|
Table 2Parameter and gain of simulation
Table 2
|
Parameter |
Value |
|
m1 [kg] |
18.5 |
|
m2 [kg] |
77.0 |
|
l1 [m] |
6.0 |
|
l2 [m] |
2.2 |
|
Gain |
Value |
|
D
|
diag([100, 100, 100, 100, 100, 100]) |
REFERENCES
- 1. Barakou, S. C., Tzafestas, C. S., Valavanis, K. P., (2024), A review of real-time implementable cooperative aerial manipulation systems, Drones, 8(5), 196.
- 2. Su, Y., Li, J., Jiao, Z., Wang, M., Chu, C., Li, H., Zhu, Y., Liu, H., (2023), Sequential manipulation planning for over-actuated unmanned aerial manipulators, Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems. 6905-6911.
- 3. Sarkisov, Y. S., Kim, M. J., Bicego, D., Tsetserukou, D., Ott, C., Franchi, A., Kondak, K., (2019), Development of sam: Cable-suspended aerial manipulator, Proceedings of the International Conference on Robotics and Automation. 5323-5329.
- 4. Kong, F., Zambella, G., Monteleone, S., Grioli, G., Catalano, M. G., Bicchi, A., (2024), A suspended aerial manipulation avatar for physical interaction in unstructured environments, IEEE Access, 12, 48108-48125.
- 5. Gabellieri, C., Sarkisov, Y. S., Coelho, A., Pallottino, L., Kondak, K., Kim, M. J., (2020), Compliance control of a cable-suspended aerial manipulator using hierarchical control framework, Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems. 7196-7202.
- 6. La Vigne, H., Charron, G., Rancourt, D., Lussier Desbiens, A., (2024), The mamba: A suspended manipulator to sample plants in cliff environments, Drones, 8(4), 139.
- 7. Lee, J., Cho, B.-K., (2023), Design of 9-dof humanoid arms inspired by the human’s inner shoulder to enhance versatility and workspace, Robotics and Autonomous Systems, 166, 104447.
- 8. Kim, S., Park, J., (2017), Singularity avoidance algorithms for controlling robot manipulator: A comparative study, The Journal of Korea Robotics Society, 12(1), 42-54.
- 9. Tognon, M., Franchi, A., (2018), Omnidirectional aerial vehicles with unidirectional thrusters: Theory, optimal design, and control, IEEE Robotics and Automation Letters, 3(3), 2277-2282.
- 10. Brescianini, D., D’Andrea, R., (2016), Design, modeling and control of an omni-directional aerial vehicle, Proceedings of the IEEE international Conference on Robotics and Automation. 3261-3266.
- 11. Santos, D. A., Bezerra, J. A., (2022), On the control allocation of fully actuated multirotor aerial vehicles, Aerospace Science and Technology, 122, 107424.
- 12. Yao, C., Krieglstein, J., Janschek, K., (2018), Modeling and sliding mode control of a fully-actuated multirotor with tilted propellers, IFAC-PapersOnLine, 51(22), 115-120.
- 13. Abbaraju, P., Ma, X., Jiang, G., Rastgaar, M., Voyles, R. M., (2021), Aerodynamic modeling of fully-actuated multirotor uavs with nonparallel actuators, Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems. 9639-9645.
- 14. Park, W., Wu, X., Lee, D., Lee, S. J., (2023), Design, modeling and control of a top-loading fully-actuated cargo transportation multirotor, IEEE Robotics and Automation Letters, 8(9), 5807-5814.
Biography
- Jaesoon Lee
Senior researcher in Human-Centered Robotics R&D Division, Korea Institute of Robotics and Technology Convergence. His research interests are redundant manipulation, and nonlinear control.
- Wooyong Park
Researcher in Human-Centered Robotics R&D Division, Korea Institute of Robotics and Technology Convergence. His research interests are Aerial control and aerial manipulation.
- Junyoung Lee
Principal researcher in Human-Centered Robotics R&D Division, Korea Institute of Robotics and Technology Convergence. His research interests are robot dynamics, control, and application.
- Byeonggi Yu
Senior researcher in Human-Centered Robotics R&D Division, Korea Institute of Robotics and Technology Convergence. His research interest is robotic manipulation.
- Murim Kim
Director and Chief Researcher with the Human-centered Robotics R&D Division of the KIRO, Pohang, South Korea. His research interests include robust control of nonlinear plants, time-delay control, robot motion control, electro-hydraulic actuators, winding machines, collaborative robots, disaster robotics, and factory automation. Dr. Kim serves as an associate editor of the International Journal of Control, Automation, and Systems, and Journal of the Korean Society for Precision Engineering.