ABSTRACT
Digital twin technologies in manufacturing have evolved into dynamic, data-synchronized systems that facilitate real-time monitoring and control. Given that machining involves closely interconnected multi-physics behaviors, the effectiveness of a digital twin largely relies on the accuracy and reliability of its underlying process models. This review systematically evaluates three primary paradigms for machining process modeling in digital twins: physics-based, data-driven, and hybrid approaches. Physics-based models provide interpretability and physical consistency but are hindered by high computational costs and limited adaptability to changing conditions. In contrast, data-driven models offer real-time capabilities and adaptive learning but face challenges related to data scarcity and black-box behavior. Hybrid modeling has emerged as the most promising approach, combining physical laws with machine learning through techniques such as parameter correction, physics-guided learning, and state-estimation-based intelligent control. Recent research demonstrates significant advancements in predictive performance, adaptability, and computational efficiency across various machining applications, underscoring the effectiveness of new process modeling strategies for digital twins. However, challenges remain, including multi-physics integration, model reduction for real-time deployment, and autonomous self-updating in data-limited scenarios. The review concludes that hybrid models present the most viable pathway to achieving high-fidelity, self-adaptive, and trustworthy digital twins for autonomous manufacturing.
-
KEYWORDS: Digital twin, Process modeling, Physics-based modeling, Data-driven modeling, Hybrid modeling
-
KEYWORDS: 디지털 트윈, 공정 모델링, 물리 기반 모델링, 데이터 기반 모델링, 하이브리드 모델링
1. 서론
제조 산업은 데이터 기반의 자율 생산 체계인 Industry 4.0을 넘어, 인간 중심적이고 지속 가능한 가치를 창출하는 Industry 5.0으로의 패러다임 전환을 맞이하면서, 디지털 전환 기술 또한 고도화된 기술 개발을 요구하고 있다[
1,
2]. 특히 이러한 시대적 변화의 핵심 기술인 디지털 트윈(Digital Twin, DT) 기술은 기존에는 물리적 자산을 가상 공간에 구현하는 단순 가상 모델 복제 기술로 정의되었다[
3]. 그러나 물리적 실체와 데이터를 양방향 동기화하고, 생산 주기를 관리하는 동적 시스템 구현 기술로 발전하면서 제조 분야의 패러다임 전환 시대와 함께 디지털 트윈 기술이 지속적으로 개발되고 있다[
4].
이러한 디지털 트윈 기술은 제조 산업의 뿌리 기술인 정밀 절삭 가공의 핵심 기술로 자리매김하고 연구개발이 활발히 진행 중이다[
5,
6]. 특히 절삭 가공은 재료 제거 과정에서 발생하는 복잡한 열-역학적 상호작용, 공구와 소재 간의 비선형적 마찰, 공작기계 구조의 동적 변형 등의 물리적 현상이 제품 품질에 결정적인 영향을 미친다. 따라서 가상 공간에서 이러한 물리적 현상을 얼마나 정밀하게 모사하고 예측할 수 있는지가 디지털 트윈의 성패를 좌우한다.
이전의 절삭 공정 모델링 연구는 Altintas et al.이 제안한 가상 공작기계(Virtual Machine Tool) [
7]와 같이 물리학적 원리에 기반한 물리 기반(Physics-driven) 접근법이 주류를 이루어 왔다. 이러한 모델은 절삭력, 기계 구조 응답, 열-기계적 변형 등 가공 과정에서 일어나는 물리 현상을 명확한 인과관계로 설명할 수 있다는 점에서 높은 해석력을 제공한다. 그러나 실제 제조 현장은 센서 잡음, 환경 변화, 공구 마모, 재료 이질성 등 다양한 불 확실성과 시변동성을 포함하고 있어, 순수 물리 기반 모델만으로 이를 실시간으로 반영하기에는 구조적·계산적 한계가 존재한다.
이와 같은 제약을 보완하기 위해, 인공지능 및 센서 기술의 발전과 함께 데이터 기반(Data-driven) 접근법이 부상하였다. 데이터 기반 모델은 실측 데이터를 통해 시스템의 입출력 관계를 직접 학습함으로써 물리식으로 표현하기 어려운 비선형성이나 공정 변동성을 효과적으로 포착할 수 있다는 장점이 있다. 그러나 이러한 방식은 충분한 데이터가 확보되지 않을 경우 일반화 성능이 저하되고, 학습된 모델의 내부 구조와 예측 근거를 명확하게 해석하기 어려운 블랙박스(Black-box) 문제를 내포한다.
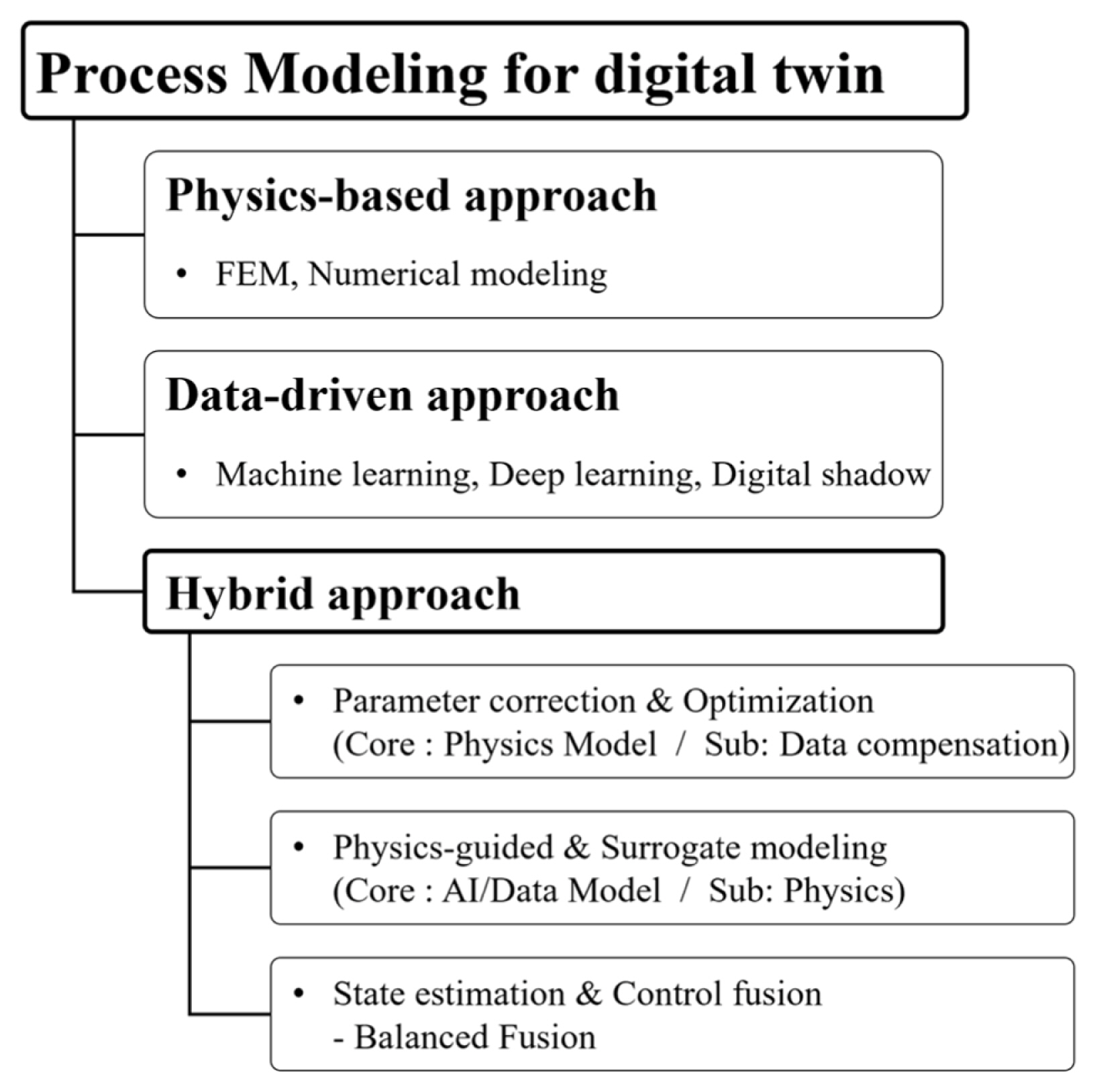
이러한 양측의 한계를 극복하기 위해 최근 연구는 자연스럽게 하이브리드(Hybrid) 모델링으로 수렴하고 있다. 하이브리드 모델링은 물리 모델의 구조적 해석력과 데이터 모델의 적응적 학습 능력을 결합함으로써, 높은 물리적 정합성과 실시간성·적응성을 동시에 확보하려는 접근법이다. 특히 하이브리드 방식은 단순 결합이 아니라, 물리 모델과 데이터 모델이 어떤 역할을 중심적으로 수행하는지에 따라 다양한 유형으로 확장될 수 있다. 본 논문에서는 이러한 역할 관계를 주도적(Core) 역할과 보조적(Sub) 역할이라는 관점에서 재정립하고, 세 가지 대표적 하이브리드 모델링 전략을 분류하였다.
본 리뷰 논문은 제조 디지털 트윈을 위한 공정 모델링 접근법의 최신 연구 동향을 체계적으로 정리하기 위해 물리 기반, 데이터 기반, 그리고 하이브리드 기반 모델의 핵심 문헌을 심층적으로 분석한다. 특히 본 논문은 공정 모델의 수치적 정확도 자체보다는, 실질적인 디지털 트윈 환경에서 각 모델링 기술이 유기적으로 결합되고 동기화되는 ‘구조적 아키텍처(Integration Architecture)’의 설계 방법론을 명확히 제시한 연구들을 중심적으로 선정하였다. 이는 단편적인 알고리즘의 우수성을 강조하는 사례를 지양하고, 실제 공정 시스템에 즉각적으로 적용할 수 있는 통합 구조를 제안함으로써 모델의 물리적 정합성과 실시간성을 동시에 확보한 사례들을 중심으로 검토하기 위함이다. 더 나아가 각 접근법의 방법론적 특성, 장단점, 적용 가능성, 그리고 제조 현장 실용화를 위해 해결해야 할 주요 기술 과제 및 전망을 종합적으로 논의한다. 본 논문에서 제안하는 공정 모델링 접근법의 전체적인 분류 체계는
Fig. 1에 제시되어 있다.
2. 물리 기반 접근법
물리 기반 접근법(Physics-based Approach)은 공정 메커니즘에 대한 이론적 이해를 바탕으로 수학적 모델을 수립하여, 데이터가 부족한 초기 단계에서도 변수 간의 인과관계를 명확히 하고 물리적 정합성을 보장한다는 점에서 디지털 트윈의 핵심 기술로 자리 잡고 있다. 최근 연구들은 단순한 기구학적 모사를 넘어, 기계와 공정 간의 복잡한 동적 상호작용을 정밀하게 예측하고 제어하는 방향으로 심화되고 있다.
기계 구조와 제어기의 동적 거동을 정밀하게 모사하기 위한 연구로, Cugnon et al.은 기계 구조의 유연 다 물체 동역학 모델에 CNC 제어 알고리즘과 순간 절삭력 모델을 결합한 통합 시뮬레이션 방법론을 제시하여, 절삭 가공 부하에 따른 기계 구조의 미세 진동과 경로 오차를 사전에 예측하고 물리적 시운전을 대체할 수 있는 디지털 트윈을 구현하였다[
8]. 이에 더해 Fujita et al.은 기계 동역학의 정밀한 식별을 위해 기계 구조적 진동과 비선형 마찰 특성을 물리 모델로 정의하고, 이를 재귀적 최소 제곱법을 통해 실시간으로 업데이트함으로써 시간 영역 시뮬레 이션에서 수 마이크로미터 수준의 고정밀 절삭 가공 오차 예측이 가능한 모델을 개발하였다[
9].
나아가, 구축된 물리 모델을 통해 디지털 트윈을 실시간 제어 및 절삭 공정 최적화에 활용하려는 시도 또한 활발하다. Ward et al.은 물리 모델의 연산 병목을 해소하기 위해 사전 계산된 공구의 공작물 절입 관계 맵과 실시간 공구 위치를 결합한 ‘Lookahead/Lookup’ 알고리즘을 개발하였으며, 이를 통해 가공 유발 잔류 응력을 58% 저감하고 채터를 선제적으로 방지하는 자율 폐쇄 루프 제어 시스템이 탑재된 디지털 트윈을 실증하였다[
10]. Zhu et al.은 절삭 가공 진행에 따라 변화하는 공작물의 상태를 실시간으로 반영하는 ‘공작물 디지털 트윈’ 개념을 도입하고, FEA 기반의 공구 경로 최적화와 혼합 현실(MR) 인터페이스를 결합하여 난삭재 박판 부품의 가공 변형을 30% 이상 줄이는 통합 프레임워크를 제안하였다[
11]. 마지막으로 현장 적용성을 극대화하기 위해 Kaneko et al.은 고가의 센서 대신 서보 모터의 토크를 이용한 센서리스 모니터링과 기상 측정(On Machine Measurement) 데이터를 순시 절삭력 및 탄성 변형 모델과 결합하여, 일반 제조 현장에서도 핵심 모델 매개변수를 실용적으로 식별할 수 있는 방법론을 디지털 트윈에 확립하였다[
12].
그러나 고정밀 물리 모델은 높은 연산 부하로 인해 실시간 디지털 트윈 기술로 접목하기 어렵고, 복잡한 가공 환경 내의 모든 변수를 수식적으로 정의하는 데에는 현실적인 제약이 따른다. 이러한 물리적 모델링의 경직성을 극복하고 실시간 데이터 스트림을 즉각적으로 활용하기 위해, 최근에는 기계 학습(Machine Learning) 및 딥러닝(Deep Learning)을 활용하여 시스템의 입출력 관계를 데이터 그 자체로부터 추론하는 데이터 기반 접근법이 대안으로 부상하고 있다.
3. 데이터 기반 접근법
데이터 기반 접근법은 현장의 입출력 데이터를 학습하여 공정 상태를 추론하는 방식으로, 물리 기반만으로는 구현하기 힘든 디지털 트윈의 실시간성과 적응성을 확보하는 방법론이다. 최근 연구들은 단순한 데이터 분석을 넘어, 디지털 트윈이 스스로 학습하고 공정을 제어하는 자율형 모델로 진화하고 있다.
먼저, 물리적 모델이 추적하기 힘든 실시간 절삭 공정 변동성을 제어하기 위해, Liu et al.은 디지털 트윈 기반의 표면 거칠기 예측 및 적응형 제어 프레임워크를 제안하였다. 이 연구에서 디지털 트윈은 실시간 데이터의 집합소이자 제어의 핵심기술로 기능하며, 신경망을 통해 공구 마모와 표면 거칠기를 학습하고 예측값이 임계치를 초과할 경우 즉각적으로 절삭 공정 변수를 최적화한다. 이는 빠른 연산 속도(3.64초)를 달성함으로써, 데이터 구동형 디지털 트윈이 단순 모니터링을 넘어 실시간 공정 제어의 핵심 플랫폼이 될 수 있음의 결과를 보여주었다[
13].
나아가 단일 공정을 넘어 공정 계획부터 실행까지 전주기를 관통하는 디지털 트윈을 구현하기 위해, Vishnu et al.은 외부 센서 없이 표준 CAM 및 CNC 데이터만을 활용하는 순수 데이터 기반 디지털 트윈 프레임워크를 제시하였다. 이 연구의 디지털 트윈은 데이터 가용성에 따라 Model-I(계획)부터 Model-III(실행)까지 단계별로 고도화되는 예측 모델을 내장하고 있으며, 지속적 학습(Continual-learning)을 통해 모델 강화가 가능하다. 이는 데이터 기반 접근법이 공정의 계획 단계와 실행 단계 간의 간극을 최소화하고, 디지털 트윈이 작업자에게 전 주기적 의사결정 지원을 제공할 수 있는 결과를 제공한다[
14].
또한, 순수 데이터 분석으로 해석의 모호성을 극복하고 디지털 트윈의 신뢰성을 높이기 위해, Ladj et al.은 지식 기반 디지털 섀도(Knowledge-based Digital Shadow) 개념을 도입하여 디지털 트윈의 중추로 활용하였다. 비지도 학습으로 도출된 데이터 패턴에 온톨로지와 비즈니스 규칙을 결합하여 이상 상황의 맥락을 추론하는 이 방식은, 기존 제어기가 감지하지 못한 공구 파손과 결함을 파악함으로써 데이터와 도메인 지식의 융합이 디지털 트윈의 상황 인지 능력과 해석 가능성을 보여주었다[
15].
이처럼 데이터 기반 디지털 트윈은 실시간성과 적응성 측면에서 비약적인 발전을 이루었으나, 학습 데이터 범위를 벗어나는 상황에 대한 대응력 부족과 결과 해석의 불투명성은 여전히 해결해야 할 과제로 남아 있다. 따라서 복잡한 공정 현상을 설명 가능한 물리 지식으로 구속하고, 물리현상을 표현하기 위한 잔차나 파라미터를 데이터로 보정해 모델의 신뢰성과 범용성을 동시에 확보하려는 물리-데이터 결합형 하이브리드 접근법이 디지털 트윈 고도화를 위한 핵심 방법론으로 부상하고 있다.
4. 하이브리드 공정 모델링 접근법
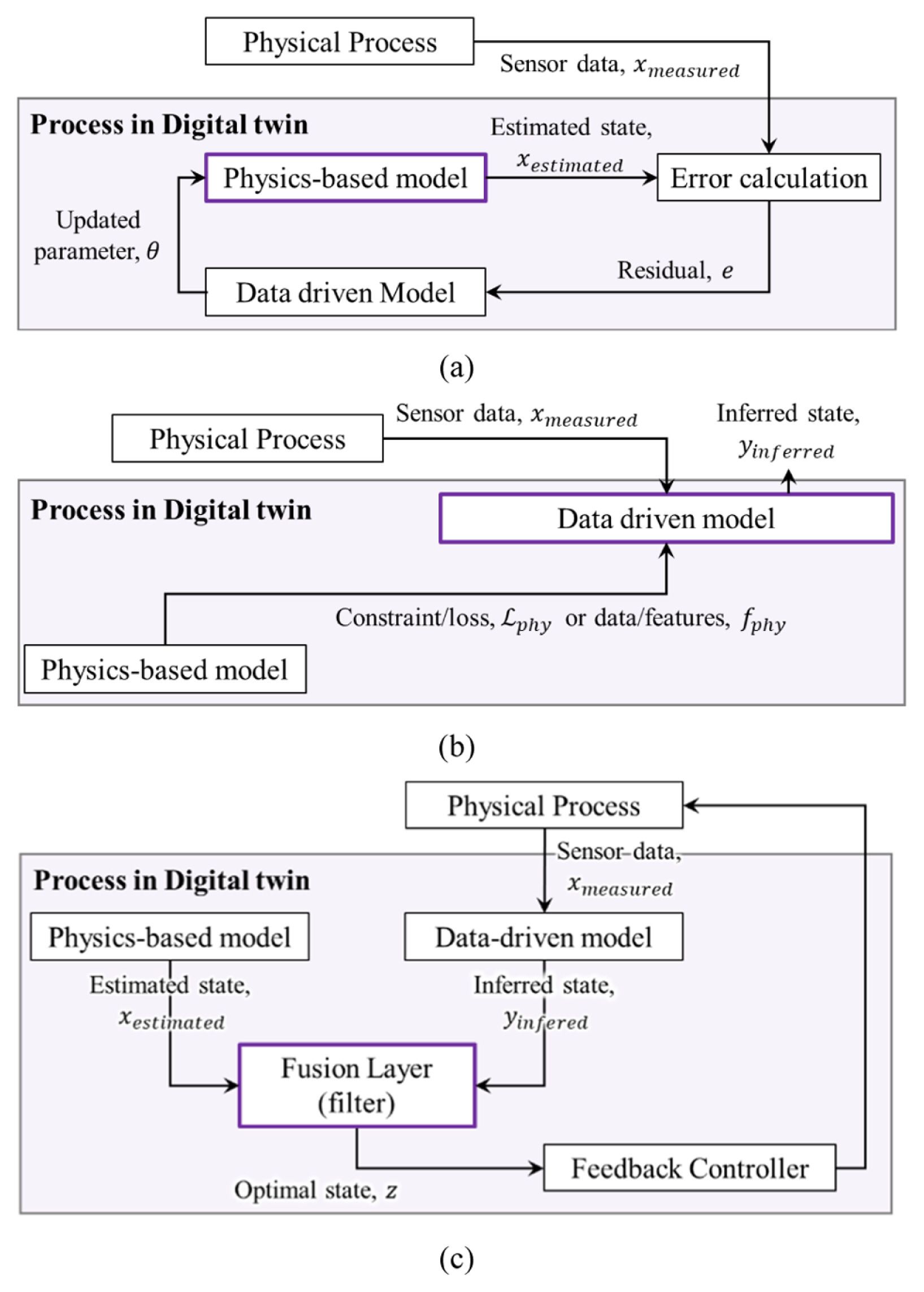
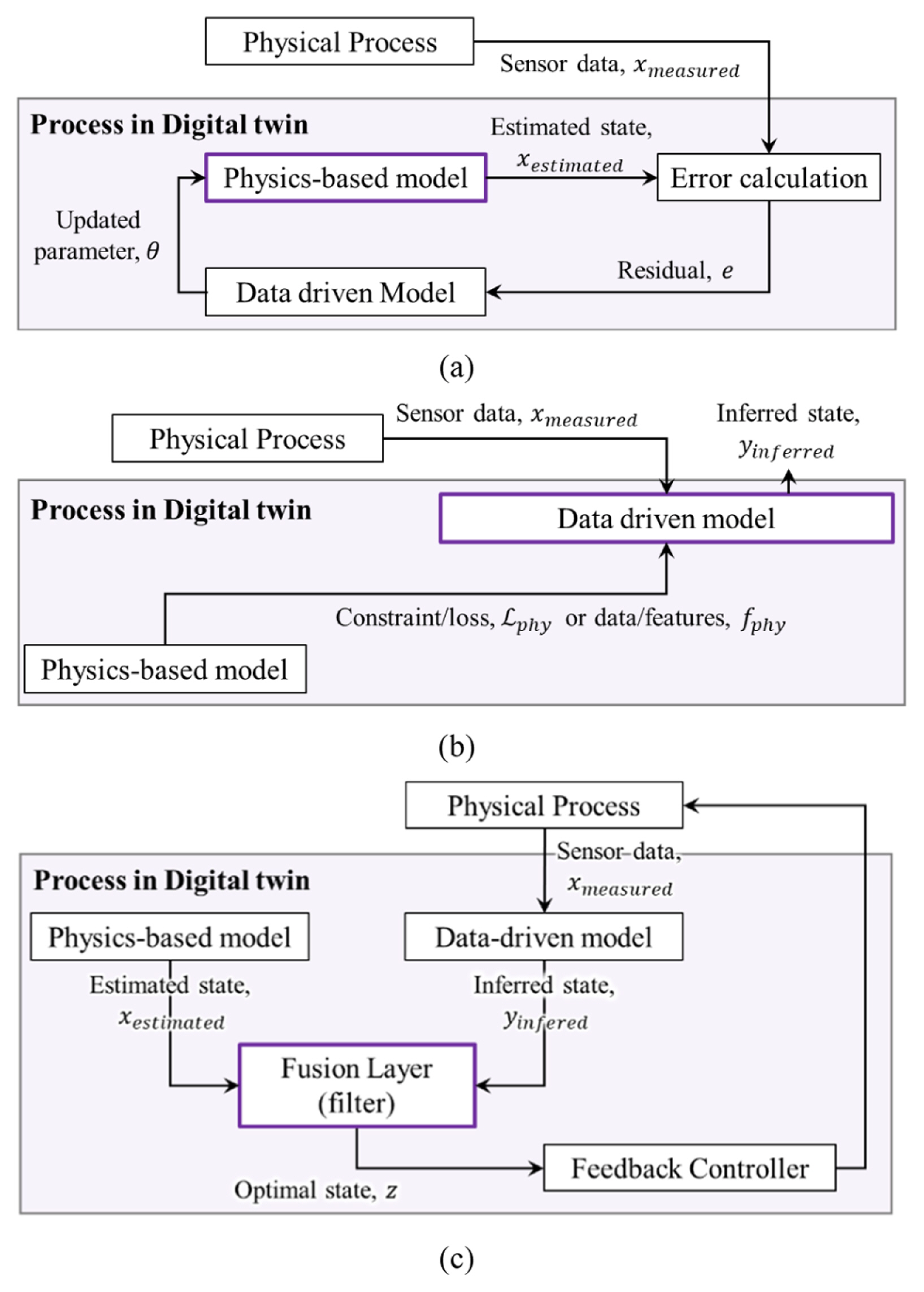
공정의 물리적 법칙에 기반하여 높은 물리 현상의 충실도와 해석력을 제공하는 물리 모델 기반 접근법과, 실시간 데이터 스트림을 통해 공정의 불확실성과 비선형성을 지속적으로 학습하고 보정할 수 있는 데이터 기반 방법론을 상호 보완적으로 결합한 하이브리드 모델링이 차세대 공정 디지털 트윈의 핵심 패러다임으로 부상하고 있다. 순수 물리 모델은 높은 계산 비용과 미세한 환경 변수 정의의 어려움이라는 단점이 있으며, 순수 데이터 모델은 학습 데이터 범위를 벗어난 상황에 대한 일반화 성능 저하와 물리적 인과관계를 설명하기 어렵다는 ‘블랙박스’ 한계가 존재한다. 본 논문은 하이브리드 모델링 전략을 정보 통합의 계층적 위계와 그에 따른 기능적 목적을 기준으로 다음과 같이 세 가지 범주로 분류한다. 각 접근법의 구조적 아키텍처와 데이터 흐름은
Fig. 2에 구체화되어 있다.
먼저,
Fig. 2(a)의 개요도에서 확인할 수 있는 물리 모델 보정 및 파라미터 최적화는 물리 모델의 파라미터 수준에서의 결합을 의미한다. 이 방식은 실제 공정의 센서 데이터(x
measured)와 물리 모델의 예측값(x
estimated) 사이의 잔차(e)를 최소화하도록 물리 모델 내의 미지 계수()를 데이터 기반 알고리즘으로 업데이트하는 구조를 취한다. 이를 통해 물리 모델의 이론적 정합성을 유지하면서도 실제 현장의 불확실성을 즉각적으로 반영할 수 있어, 디지털 트윈의 물리적 충실도와 환경 적응성을 동시에 확보하는 것을 목적으로 한다.
다음으로,
Fig. 2(b)의 도식을 통해 제시된 물리 가이드 데이터 및 대리 모델링은 데이터 기반 모델 구조 및 학습 단계에서의 결합에 해당한다. 물리적 수식이나 제약조건(L
phy) 혹은 물리 모델에서 도출된 특징(f
phy)을 데이터 기반 모델의 내부 파라미터나 손실 함수에 직접 내재하는 방식을 사용한다. 이러한 접근법은 블랙박스 형태의 데이터 모델에 물리적 인과관계를 부여함으로써 추론 결과(y
inferred)의 해석력과 데이터 효율성을 높이는 한편, 연산 부하가 큰 해석 모델을 경량화된 대리 모델로 대체하여 실시간성을 확보하는 데 그 목적이 있다.
마지막으로,
Fig. 2(c)에 묘사된 상태 추정 및 지능형 제어 융합은 출력 및 의사결정 단계에서의 병렬적 결합을 특징으로 한다. 독립적으로 구동되는 물리 모델의 상태 추정값(x
estimated)과 데이터 모델의 추론값(y
inferred)을 융합 레이어에서 확률적으로 결합하여 최종적인 최적 상태(z)를 도출하는 아키텍처이다. 이는 다원적 정보 융합을 통해 단일 모델의 한계를 극복하고, 디지털 트윈이 단순한 모니터링 도구를 넘어 공정의 불확실성을 스스로 최적화하는 능동적 제어 주체로서 기능하도록 하는 데 핵심적인 목적이 있다.
이 접근법은 물리 모델을 디지털 트윈의 핵심 뼈대(Backbone) 로 사용하되, 이론적으로 산출하기 어려운 계수나 공정 중 시시각각 변하는 파라미터를 데이터 기반 알고리즘으로 식별하거나 모델을 학습하고 보정함으로써, 물리적 정합성과 데이터의 적응성을 동시에 확보하는 방식이다.
먼저 마이크로 단위의 정밀 절삭 가공에서 물리적 거동의 불확실성을 보정하기 위한 연구로, Christiand et al.은 마이크로 밀링 공정의 공구 마모를 추적하기 위해 스핀들 모터, 제어기, 그리고 절삭 토크의 동적 거동을 미분 방정식으로 정식화한 물리 모델을 구축하였다. 그러나 미세 공정 특성상 물리식만으로는 마모에 따른 토크 변화를 완벽히 예측하기 어렵다는 한계를 극복하기 위해, 실제 가공 중 수집되는 실시간 토크 데이터와 물리 모델의 시뮬레이션 토크 간의 차이를 데이터 기반으로 지속 보정하는 하이브리드 전략을 적용했다. 이를 통해 평균 0.037 mm의 정밀한 오차로 공구 마모를 예측하는 데 성공하였으며, 이는 물리적 법칙에 기반한 시뮬레이션이 실시간 데이터와 결합될 때 예지보전의 신뢰성을 획기적으로 높일 수 있음을 보여주었다[
16]. 또 다른 절삭 공정인 복잡한 다중 물리가 작용하는 CFRP 드릴링 공정의 경우, Chen et al.은 힘-열 결합 문제를 해결하기 위해 절삭력과 열전달 메커니즘을 수식화 한 물리 모델에 마모 진행에 따른 형상 변화를 반영하는 5가지 마모 보정 함수를 도입하였다. 특히 모델 내의 미지 파라미터를 식별하기 위해 실제 드릴링 실험 데이터를 기반으로 최적화 알고리즘을 적용하는 하이브리드 보정 방식을 채택하여, 추력과 출구 온도에서 매우 낮은 평균 오차를 달성하고 물리적 투명성을 확보한 고정밀 드릴링 트윈 물리 엔진을 구현하였다[
17].
스핀들의 열적 특성 예측을 위해 Yi & Fan은 유한 요소 열해석(FEA)의 경계조건(마찰열, 접촉 열저항)을 이론적으로 산출하기 어려운 한계에 대해서, IoT 센서로 수집된 실시간 온도 데이터를 역전파 신경망에 입력하여 현재 상태에 맞는 열 경계조건을 추론하고 이를 다시 FEA 모델에 입력하는 방식을 제안하였다. 이 하이브리드 모델은 온도 예측 정확도 98% 이상, 열변형 예측 정확도 96% 이상을 달성하여, 물리 모델의 구조적 지식을 유지하면서 데이터로 경계조건의 정밀도를 보완하는 전략의 유효성을 입증하였다[
18]. 유사한 맥락에서 Hänel et al.은 기하, 열, 채터 등 다양한 물리 모델을 통합한 디지털 트윈을 제안하면서, 기계의 구동 모터의 전류 데이터 활용해 경험적 절삭력 물리 모델의 계수를 실시간으로 적응시킴으로써, 디지털 섀도가 정적 모델이 아닌 지속적으로 진화하는 동적 모델이 되도록 구현하는 방법론을 제시하였다[
19].
상용 공작기계와 같이 제어 로직이 공개되지 않은 시스템의 정보 접근성 한계를 극복하기 위해, Sim & Lee는 상용 CNC 공작기계의 제어기와 피드 구동계의 물리적 거동을 수식화 하되, 비공개된 제어 특성을 스케일 인자로 정의하고 유전 알고리즘을 통해 실제 가공 데이터로부터 이 인자와 마찰 모델 파라미터를 역추적하여 물리 모델을 완성하였다. 이렇게 구축된 고신뢰도 디지털 트윈을 기반으로 가공 조건을 최적화한 결과, 가공 시간을 16.9%, 생산 비용을 36.4% 절감하는 성과를 거두어 상용 장비의 ‘블랙박스’ 영역을 데이터 최적화로 규명한 실용적 사례를 보여주었다[
20].
결론적으로, 물리 모델 보정 및 파라미터 최적화를 통한 하이브리드 접근법은 물리적 법칙의 해석 가능성을 유지하면서도 실시간 데이터를 통해 모델의 불확실성과 미지 파라미터를 정밀하게 보정함으로써 디지털 트윈의 공정 물리현상의 충실도를 획기적으로 향상시킬 수 있다. 이러한 방식은 기존의 정적인 물리 시뮬레이션을 공정 상태 변화에 따라 스스로 진화하는 동적 모델로 전환시켰으며, 제어 로직이 비공개된 상용 장비나 복잡한 다중 물리 현상과 같은 ‘블랙박스’ 영역까지도 디지털 트윈의 범주로 포섭하는 데 성공하였다. 궁극적으로 이는 가상 모델과 실제 공정 간의 간극(Gap)을 최소화하여 예지보전 및 공정 제어의 신뢰성을 담보함으로써, 자율 제조를 위한 고정밀 디지털 트윈 구축의 필수적인 기반 기술임을 보여준다.
4.2 물리 가이드 데이터 및 대리 모델링
이 접근법은 데이터 모델인 인공지능을 주축으로 하되, 물리적 지식(수식, 시뮬레이션 데이터)을 학습 데이터나 입력 특성으로 활용해 데이터 효율성을 높이거나, 계산 비용이 많이 드는 물리 해석을 경량화된 대리 모델(Surrogate Model)로 대체해 실시간성을 확보하는 하이브리드 방식이다.
Sa et al.은 데이터 모델의 성능이 센서 데이터의 품질에 좌우된다는 점에 착안하여, FEA 시뮬레이션으로 스핀들의 가상 온도장을 생성하고 이를 바탕으로 유전 알고리즘을 통해 열 오차 예측에 최적인 센서 위치를 먼저 선정하였다. 이렇게 최적화된 위치의 센서 데이터는 시계열 특성을 학습하는 신경망에 입력되어 열 오차를 예측하며, 연삭기에 적용된 결과 높은 정확도를 달성하였다. 이는 물리적 시뮬레이션을 통해 데이터 모델의 입력 변수를 최적화함으로써, 제한된 센서만으로도 디지털 트윈의 경제성과 예측 정확도를 동시에 확보한 하이브리드 접근법의 유효성을 보여주었다[
21].
Zheng et al.은 스핀들 열변형 예측을 위해 순수 데이터 모델을 사용하는 대신, 스핀들의 기하학적 변형 메커니즘에서 도출된 비차원 파라미터와 구조적 변수들을 신경망의 입력 특징으로 활용하는 알고리즘을 제안하였다. 물리적 메커니즘 정보를 데이터 모델에 내재화함으로써 일반화 성능을 높인 이 모델은 실제 가공 실험에서 Y축 및 Z축 열 오차를 각각 감소시켜, 물리적 지식이 데이터 모델의 해석력과 강건성(Robustness)을 보강함으로써 디지털 트윈의 신뢰도를 높일 수 있음을 증명하였다[
22].
Yang et al.은 물리 기반의 절삭력 및 온도 모델을 사용하되, 모델의 핵심 변수이지만 이론적 산출이 어려운 전단각(Shear Angle)을 예측하기 위해 칩을 형태학적 분석 데이터로 학습된 인공신경망을 도입하였다. 인공신경망이 예측한 전단각이 다시 물리 모델의 입력으로 사용되는 ‘데이터 지원 물리 모델링’ 구조를 통해, 절삭력 예측, 온도 예측에서 높은 정밀도를 달성하였으며, 이는 데이터 기반 인공지능이 물리 모델의 불확실한 연결고리를 완성하는 역할을 수행할 때 디지털 트윈이 최적의 성능을 낼 수 있음을 제시하였다[
23].
계산 효율성 측면에서 Xuewei Zhang et al.은 초음파 진동 보조 밀링의 복잡한 물리 현상을 실시간으로 모니터링하기 위해, 계산 비용이 많이 드는 FEA결과를 대리 모델로 변환하여 응력 분포를 실시간 시각화 하였다. 또한 고장 진단에는 신경망을 사용하여 98.7%의 진단 정확도를 확보함으로써, 물리적 해석의 정확성과 데이터 모델의 연산 효율성을 결합하여 복잡한 공정의 실시간 가시성과 진단 신뢰성을 동시에 확보한 디지털 트윈 시스템을 구현하였다[
24].
Zheng et al.은 밀링 파라미터 식별을 위해 연산이 빠른 컨볼루션 모델로 파라미터의 근사해를 먼저 찾아 탐색 범위를 좁히고, 이후 정밀한 수치적 모델과 알고리즘으로 최적해를 찾는 계층적 하이브리드 접근을 취했다. 이를 통해 기존 대비 축 방향 절삭 깊이의 오차를 8.3% 미만으로 줄이면서도 전체 실행 시간을 1.35초로 단축하여, 디지털 트윈의 온라인 모니터링에 필수적인 연산 효율성을 확보하였다[
25]. 이외에도 Li et al.은 공정 계획 단계에서 물리 기반 공정 지식인 설계 요구사항과 데이터 기반 컴퓨터 비전 기술인 PointNet++을 결합하여, 가공 대상의 설계 모델에서 가공 피처를 인식하고 과거 가공 이력을 매핑함으로써 피처 단위의 지식 재사용과 지능형 공정 계획이 가능한 디지털 트윈을 실현하였다[
26]. 마지막으로 Liu et al.은 공구 상태 모니터링을 위해 데이터 모델을 사용하여 입출력 관계를 식별하되, 이를 블랙박스로 두지 않고 비선형 주파수 응답 함수를 통해 물리적 특징을 추출하여 진단에 활용하였다. 이 방법은 신호 기반 방식보다 월등한 정확도를 보였으며, 데이터 모델링 결과물을 물리적으로 해석하여 진단에 활용하는 설명 가능한 디지털 트윈의 방향성을 제시하였다[
26].
이상의 사례들을 관통하는 핵심은 물리적 메커니즘을 별도의 해석 도구로 남겨두지 않고, 데이터 모델의 내부 파라미터나 학습 구조로 내재화하였다는 점이다. 즉, 시스템의 뼈대는 데이터 모델이 담당하되, 물리적 지식이 그 모델의 입력 차원을 축소하거나 탐색 범위를 좁히는 보조 역할을 수행하는 구조다. 이는 인공지능이 데이터 간의 상관관계만을 학습하는 것을 넘어 인과관계에 기반한 추론을 하도록 유도함으로써, 데이터 주도형 모델의 범용성과 물리 모델의 강건함을 하나의 신경망 안에서 실현했다는 점에서 중요한 시사점을 갖는다.
4.3 상태 추정 및 지능형 제어 융합
Liang et al.은 공구 위치나 절삭 조건에 따라 기계의 동적 특성이 변한다는 점을 고려하여, 초기 FEM과 구조 동역학 모델을 칼만 필터로 융합함으로써 기계의 주파수 응답 함수를 실시간으로 갱신하는 동적 디지털 트윈을 구현하였다. 이는 시변하는 공정 환경에서도 디지털 트윈이 실제 기계와 동일한 동적 거동을 유지하도록 하여 가공 안정성 평가의 정밀도를 높였다[
27]. Qiu et al.은 공작 기계의 구조적 진동 문제를 해결하기 위해 초기 FEM 모드 형상과 실시간 서보 데이터를 융합하여 전체 구조물의 진동을 재구성하는 구조 동역학 디지털 트윈을 제안하여, 디지털 트윈을 수동적 미러링 도구에서 능동적 제어 해결책으로 확장하였다[
28]. Luo et al.은 다중 영역 물리 모델을 통해 센서로 측정 불가능한 내부 상태(온도, 응력)를 가상으로 추정하고, 이를 실제 센서 데이터와 입자 필터 알고리즘으로 융합해 공구의 잔여 유효 수명을 예측하는 고신뢰도 예지보전 디지털 트윈을 제안하였다. 이 방식은 물리-데이터의 확률적 융합을 통해 단일 모델 대비 예측 오차를 21.36%에서 3.17%로 획기적으로 줄여 디지털 트윈을 통해 신뢰할 수 있는 유지 보수의 가능성을 입증하였다[
29]. 공정 제어 측면에서 Chen et al.은 CFRP 드릴링의 박리(Delamination)를 방지하기 위해, 파괴 역학 모델과 마모 예측 모델을 결합한 능동형 품질 제어 디지털 트윈을 구축하였다. 이 시스템은 예측된 마모 상태에서 박리가 발생하지 않는 최대 허용 이송 속도를 실시간으로 계산해 장비를 제어함으로써, 디지털 트윈이 공구 수명 전반에 걸쳐 가공 품질을 능동적으로 보장할 수 있음을 보여주었다[
30].
Zhao et al.은 5축 가공의 표면 품질을 확보하기 위해 동적 절삭력 시뮬레이션과 Support Vector Machine (SVM) 모델을 결합하고, 예측값이 임계치를 초과하면 경사 하강법으로 공정 변수를 최적화하여 피드백하는 자기 적응형(Self-adaptive) 디지털 트윈을 개발하였다. 이를 통해 표면 거칠기를 80% 이상 개선하며 디지털 트윈이 실시간 공정 최적화의 주체가 될 수 있음을 증명하였다[
31].
로봇 가공 분야에서는 Ni et al.이 로봇 기구학 모델의 잔차를 LightGBM (Light Gradient Bossting Machine)으로 학습하여 관절 오차를 보정하고, 단계적 업데이트 전략을 통해 모델의 노후화를 방지하는 고정밀 로봇 디지털 트윈을 제안하여 윤곽 오차를 90% 이상 감소시켜 로봇 가공의 정밀도를 개선하였으며[
32], Guo et al.은 기계 움직임의 물리적 규칙 및 기하학적 관계 기반한 물리 시뮬레이션 기능의 역할을 하는 GJK (Gilbert-Johnson-Keerthi) 충돌 감지 알고리즘과 생산 데이터를 기반으로 공구의 마모를 예측하는 다층 신경망을 결합한 피드백 제어를 통해 공정 안전성과 효율성을 동시에 관리하는 통합 모니터링 디지털 트윈을 구현하였다[
33].
나아가 절삭 공정의 전 주기적 관점에서 보았을 때, Domínguez-Caballero et al.은 드릴링 중 발생하는 추력 토크 신호의 기상관측 측정값으로 공구 마모 진전을 실시간으로 추정하는 딥러닝 모델을 활용하였다. 이 절차에서, 절삭 메커니즘을 반영하여 신호 변화가 공구 마모 및 파손 메커니즘과 연결되는 지를 반영하는 Physical Knowledge Layer를 포함하여, 공구의 조기 마모 검출과 상태 인식 수명 예측의 전 주기적 역할을 하는 디지털 트윈을 개발하였다[
34]. Li et al.은 기하 재료 물리적 메커니즘 모델을 데이터 기반의 연삭 상태 추정 모델과 결합하여 연삭 공정의 미세 표면 오차를 크로스 스케일로 가시화함으로써, 보이지 않는 품질 정보를 실시간으로 제공하는 가시화 디지털 트윈의 가능성을 제시하였다[
35].
종합하면, 상태 추정 및 지능형 제어 융합을 통한 하이브리드 접근법은 디지털 트윈을 단순한 가상 모니터링 도구에서 공정의 불확실성을 스스로 제어하고 최적화하는 능동적 주체로 발전시켰다는 데 그 핵심적인 의의가 있다. 이러한 연구들은 물리적 모델의 해석적 강건성과 데이터 모델의 실시간 적응력을 결합함으로써, 단일 모델만으로는 해결하기 어려웠던 기계의 복잡한 동적 거동과 미세 품질 변동을 정밀하게 제어할 수 있음을 입증하였다. 결과적으로 하이브리드 기반의 상태 추정 및 제어 기술은 가상과 현실의 간극을 최소화하고 제조 공정의 투명성과 자율성을 동시에 확보하여, 궁극적으로 자율 제조 시스템 실현을 위한 필수적인 기술적 토대를 마련하였다.
5. 주요 과제 및 향후 전망
본 리뷰에서 고찰한 바와 같이, 절삭 가공 공정의 디지털 트윈은 물리적 해석의 정밀도와 데이터 기반 모델의 유연성을 결합하는 방향으로 비약적인 발전을 이루었다. 그러나 실제 제조 현장의 복잡성과 불확실성을 완벽하게 제어하고 완전한 자율 제조를 실현하기 위해서는 여전히 해결해야 할 기술적 난제들이 존재한다. 향후 연구는 이러한 한계를 극복하기 위해 모델링 기술의 효율화와 데이터 운영의 자율성을 확보하는 방향으로 전개될 것으로 전망된다.
먼저, 고충실도(High-fidelity) 모델링과 실시간성(Real-time) 간의 상충 관계를 해결하고 다중 물리 현상을 통합하는 것이 시급한 과제이다. 현재의 하이브리드 모델은 기구학적 거동뿐만 아니라 열역학, 재료 과학적 현상이 복합적으로 작용하는 다중 스케일(Multi-scale) 공정을 정밀하게 묘사할수록 연산 비용이 급증하여 실시간 제어에 적용하기 어려운 딜레마를 안고 있다. 이를 극복하기 위해 모델 차수 축소법이나 물리 정보 신경망과 같이 물리적 법칙을 내재화하면서도 연산 속도를 획기적으로 높이는 경량화 기술의 고도화가 필수적이다. 또한 서로 다른 물리적 도메인의 이질적인 모델들을 표준화된 인터페이스로 연동하고, 실시간성이 요구되는 제어 연산은 엣지(Edge)에서, 대규모 시뮬레이션은 클라우드(Cloud)에서 수행하는 계층적 컴퓨팅 아키텍처의 최적화가 요구된다.
나아가 현장의 데이터 희소성(Small Data)을 극복하고 인간의 개입을 최소화하는 자율 보정 기술의 확보가 필요하다. 실제 제조 현장은 고품질 데이터 확보가 어렵고 비정상 상황 데이터가 부족하므로, 소량의 실험 데이터나 시뮬레이션 데이터만으로도 효율적인 학습이 가능한 전이 학습(Transfer Learning) 연구가 강화되어야 한다. 이를 통해 한 공정에서 학습된 지식을 다른 장비로 확장하는 범용성을 확보함과 동시에, 궁극적으로는 공구 마모나 환경 변화 등 시변하는 공정 조건을 스스로 감지하여 모델 구조를 유연하게 변경하고 지식 베이스를 확장해 나가는 자율 강화형 디지털 트윈이 향후 기술 경쟁력의 핵심이 될 것이다.
6. 결론
논문에서는 스마트 제조의 핵심 기술인 디지털 트윈의 공정 모델링 방법론을 물리 기반, 데이터 기반, 그리고 하이브리드 접근법으로 분류해 심층적으로 고찰하였다. 기존의 물리 기반 모델은 높은 해석력을 제공하나 실시간성과 환경 적응성에 한계가 있었으며, 데이터 기반 모델은 빠른 연산과 유연성을 갖추었으나 일반화 능력 부족과 블랙박스 문제가 제기되어 왔다. 이에 대한 대안으로 부상한 하이브리드 공정 모델링은 두 방법론의 장점을 상호 보완적으로 결합하여 디지털 트윈의 완성도를 한차원 높이는 데 이바지했다.
리뷰를 통해 확인된 하이브리드 모델링의 주요 성과는 다음과 같다. 첫째, 물리 모델 보정 및 파라미터 최적화 전략은 이론적 모델의 구조적 지식을 유지하면서 데이터로 미지수와 오차를 보정함으로써, 상용 장비나 미세 가공과 같은 불확실성이 높은 영역에서도 모델의 신뢰성을 확보하였다. 둘째, 물리 가이드 데이터 및 대리 모델링은 물리적 시뮬레이션 정보를 데이터 모델의 입력이나 학습 가이드로 활용해, 적은 데이터 환경에서도 높은 예측 정확도와 물리적 정합성을 달성하고 연산 비용을 획기적으로 절감하였다. 셋째, 상태 추정 및 지능형 제어 융합은 칼만 필터나 입자 필터와 같은 융합 알고리즘을 통해 공정의 숨겨진 상태를 실시간으로 추정하고 이를 제어 루프에 직접 연결함으로써, 디지털 트윈을 단순한 가상 모니터링 도구에서 공정 품질과 안정성을 스스로 최적화하는 자율 제어의 주체로 확장하게 했다.
결론적으로, 물리적 지식과 데이터 지능의 융합은 가상 모델과 실제 공정 간의 동기화 수준을 극대화하고, 복잡한 제조 현상의 해석 가능성과 제어 가능성을 동시에 충족시키는 가장 현실적이고 강력한 솔루션임이 입증되었다. 향후 하이브리드 모델링 기술은 다중 물리/다중 스케일 통합과 강화되는 AI 기술과의 결합을 통해 더 고도화될 것이며, 이는 궁극적으로 인간의 개입을 최소화하고 생산성과 품질을 극대화하는 자율 제조 시스템의 실현을 앞당기는 핵심 동력이 될 것이다.
FOOTNOTES
-
ACKNOWLEDGEMENT
본 연구는 2022년도 과학기술정보통신부 재원으로 한국연구재단의 지원(No.NRF-2022R1A2C3007963)와 2023년도 산업통상자원부 및 한국산업기술평가관리원(KEIT)의 산업기술 알키미스트 프로젝트(No. 20025702)의 연구비 지원에 의한 연구임.
Fig. 1Classification taxonomy of process modeling approaches for digital twin
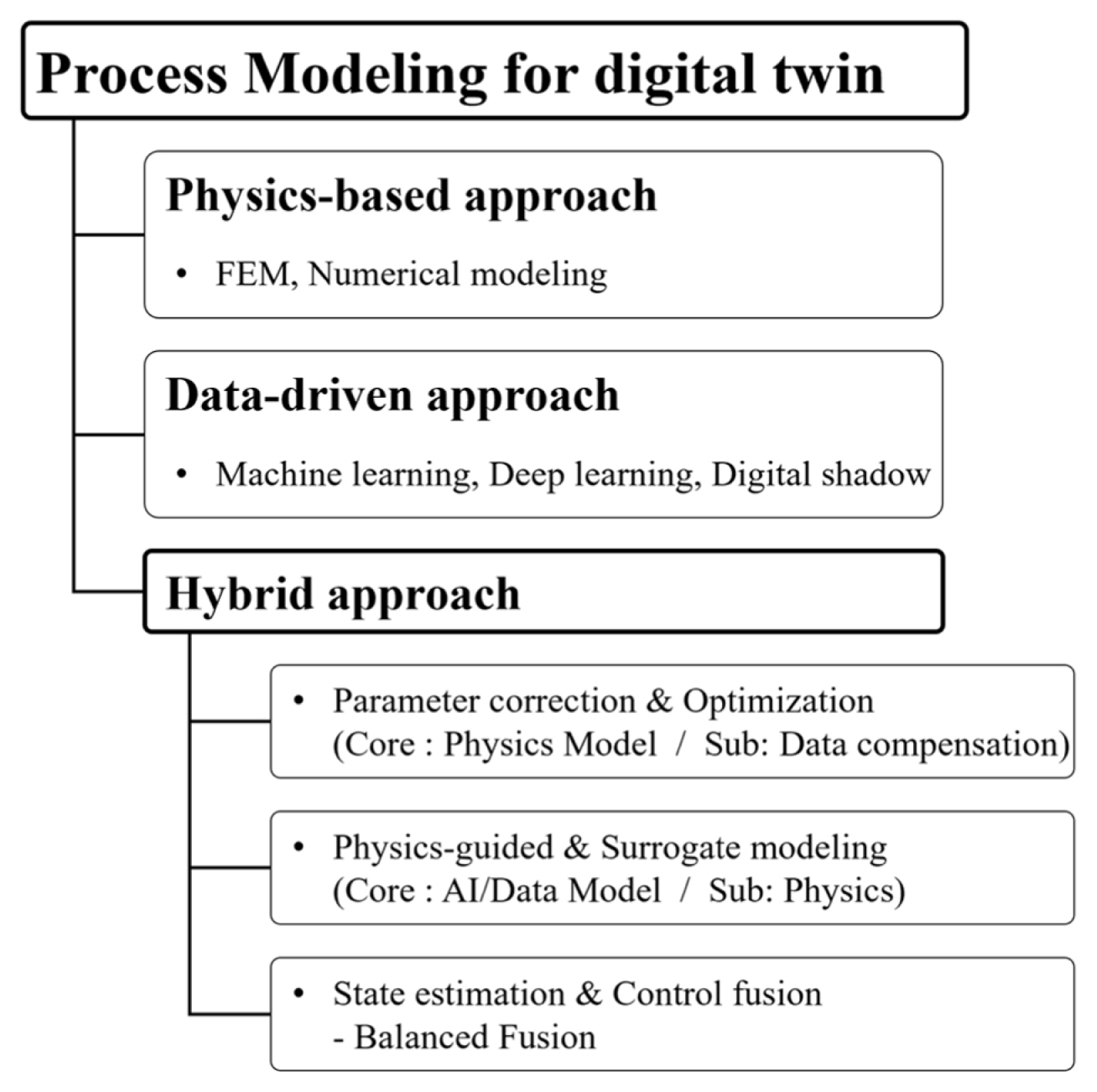
Fig. 2Conceptual architectures of three hybrid modeling strategies: (a) Physics model correction and parameter optimization, (b) Physics-guided data and surrogate modeling, and (c) State estimation and intelligent control fusion
REFERENCES
- 1. Xu, X., Lu, Y., Vogel-Heuser, B., Wang, L., (2021), Industry 4.0 and industry 5.0—inception, conception and perception, Journal of Manufacturing Systems, 61, 530-535.
- 2. Leng, J., Sha, W., Wang, B., Zheng, P., Zhuang, C., Liu, Q., Wuest, T., Mourtzis, D., Wang, L., (2022), Industry 5.0: Prospect and retrospect, Journal of Manufacturing Systems, 65, 279-295.
- 3. Friederich, J., Francis, D. P., Lazarova-Molnar, S., Mohamed, N., (2022), A framework for data-driven digital twins of smart manufacturing systems, Computers in Industry, 136, 103586.
- 4. Liu, X., Jiang, D., Tao, B., Xiang, F., Jiang, G., Sun, Y., Kong, J., Li, G., (2023), A systematic review of digital twin about physical entities, virtual models, twin data, and applications, Advanced Engineering Informatics, 55, 101876.
- 5. Fu, X., Song, H., Li, S., Lu, Y., (2025), Digital twin technology in modern machining: A comprehensive review of research on machining errors, Journal of Manufacturing Systems, 79, 134-161.
- 6. Fu, X., Li, S., Song, H., Lu, Y., (2025), Digital twin-driven multi-scale characterization of machining quality: Current status, challenges, and future perspectives, Robotics and Computer-Integrated Manufacturing, 93, 102902.
- 7. Altintas, Y., Brecher, C., Weck, M., Witt, S., (2005), Virtual machine tool, CIRP Annals, 54(2), 115-138.
- 8. Cugnon, F., Berglind, L., Plakhotnik, D., Armendia, M., (2018), Simulation of machining operations using the virtual machine tool concept, Proceedings of the International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, V006T009A010.
- 9. Fujita, T., Xi, T., Ikeda, R., Kehne, S., Fey, M., Brecher, C., (2022), Identification of a practical digital twin for simulation of machine tools, International Journal of Automation Technology, 16(3), 261-268.
- 10. Ward, R., Sun, C., Dominguez-Caballero, J., Ojo, S., Ayvar-Soberanis, S., Curtis, D., Ozturk, E., (2021), Machining digital twin using real-time model-based simulations and lookahead function for closed loop machining control, The International Journal of Advanced Manufacturing Technology, 117(11), 3615-3629.
- 11. Zhu, Z., Xi, X., Xu, X., Cai, Y., (2021), Digital twin-driven machining process for thin-walled part manufacturing, Journal of Manufacturing Systems, 59, 453-466.
- 12. Kaneko, K., Kudo, A., Waizumi, T., Shimizu, J., Zhou, L., Ojima, H., Onuki, T., (2024), Practical method for identifying model parameters for machining error simulation in end milling through sensor-less monitoring and on-machine measurement, International Journal of Automation Technology, 18(3), 342-351.
- 13. Liu, L., Zhang, X., Wan, X., Zhou, S., Gao, Z., (2022), Digital twin-driven surface roughness prediction and process parameter adaptive optimization, Advanced Engineering Informatics, 51, 101470.
- 14. Vishnu, V., Varghese, K. G., Gurumoorthy, B., (2023), A data-driven digital twin framework for key performance indicators in CNC machining processes, International Journal of Computer Integrated Manufacturing, 36(12), 1823-1841.
- 15. Ladj, A., Wang, Z., Meski, O., Belkadi, F., Ritou, M., Da Cunha, C., (2021), A knowledge-based digital shadow for machining industry in a digital twin perspective, Journal of Manufacturing Systems, 58, 168-179.
- 16. Christiand Kiswanto, G., Baskoro, A., Ko, T., (2025), Digital twin of micro-milling process for micro-tool wear, International Journal of Computer Integrated Manufacturing, 1-26.
- 17. Chen, J., An, Q., Chen, M., Ko, T. J., Chen, T., (2025), Digital twin dynamic force-thermal physics sub-cell for CFRP drilling process, Composites Part B: Engineering, 292, 112057.
- 18. Yi, H., Fan, K., (2023), Co-simulation-based digital twin for thermal characteristics of motorized spindle, The International Journal of Advanced Manufacturing Technology, 125(9), 4725-4737.
- 19. Hänel, A., Seidel, A., Frieß, U., Teicher, U., Wiemer, H., Wang, D., Wenkler, E., Penter, L., Hellmich, A., Ihlenfeldt, S., (2021), Digital twins for high-tech machining applications—a model-based analytics-ready approach, Journal of Manufacturing and Materials Processing, 5(3), 80.
- 20. Sim, B., Lee, W., (2023), Digital twin based machining condition optimization for CNC machining center, International Journal of Precision Engineering and Manufacturing-Smart Technology, 1(2), 115-123.
- 21. Sa, G., Jiang, Z., Liu, Z., Sun, J., Qiu, C., He, L., Tan, J., (2024), An integrated optimization method for measurement points layout and error modeling for digital twin of CNC machine tools, Precision Engineering, 90, 1-11.
- 22. Zheng, Y., Yang, H., Jiang, G., Hu, S., Tao, T., Mei, X., (2025), Data-mechanism fusion modeling and compensation for the spindle thermal error of machining center based on digital twin, Measurement, 250, 117152.
- 23. Yang, S. M., Choe, J.-H., Kim, J., Kim, D. M., Park, H. W., (2025), Intelligent digital twin process for the end-milling simulation combined with a multi-physical model, Journal of Intelligent Manufacturing, 1-18.
- 24. Zhang, X., Shi, T., Huang, X., Yu, T., (2026), A digital twin-driven in-process monitoring system for the ultrasonic vibration-assisted milling, Robotics and Computer-Integrated Manufacturing, 98, 103168.
- 25. Zheng, C. M., Zhang, L., Kang, Y.-H., Zhan, Y., Xu, Y., (2022), In-process identification of milling parameters based on digital twin driven intelligent algorithm, The International Journal of Advanced Manufacturing Technology, 121(9), 6021-6033.
- 26. Li, J., Zhou, G., Zhang, C., Hu, J., Chang, F., Matta, A., (2025), Defining a feature-level digital twin process model by extracting machining features from mbd models for intelligent process planning, Journal of Intelligent Manufacturing, 36(5), 3227-3248.
- 27. Liang, Z., Wang, S., Peng, Y., Mao, X., Yuan, X., Yang, A., Yin, L., (2022), The process correlation interaction construction of digital twin for dynamic characteristics of machine tool structures with multi-dimensional variables, Journal of Manufacturing Systems, 63, 78-94.
- 28. Qiu, Y., Mao, X., Gao, C., Xu, Y., Liu, H., (2025), Structural dynamics-driven digital twin framework for real-time vibration modelling of machine tools, Mechanical Systems and Signal Processing, 240, 113406.
- 29. Luo, W., Hu, T., Ye, Y., Zhang, C., Wei, Y., (2020), A hybrid predictive maintenance approach for CNC machine tool driven by digital twin, Robotics and Computer-Integrated Manufacturing, 65, 101974.
- 30. Chen, J., Li, S., Teng, H., Leng, X., Li, C., Kurniawan, R., Ko, T. J., (2025), Digital twin-driven real-time suppression of delamination damage in CFRP drilling, Journal of Intelligent Manufacturing, 36(2), 1459-1476.
- 31. Zhao, Z., Wang, S., Wang, Z., Wang, S., Ma, C., Yang, B., (2022), Surface roughness stabilization method based on digital twin-driven machining parameters self-adaption adjustment: A case study in five-axis machining, Journal of Intelligent Manufacturing, 33(4), 943-952.
- 32. Ni, H., Hu, T., Deng, J., Chen, B., Luo, S., Ji, S., (2025), Digital twin-driven virtual commissioning for robotic machining enhanced by machine learning, Robotics and Computer-Integrated Manufacturing, 93, 102908.
- 33. Guo, M., Fang, X., Hu, Z., Li, Q., (2023), Design and research of digital twin machine tool simulation and monitoring system, The International Journal of Advanced Manufacturing Technology, 124(11), 4253-4268.
- 34. Dominguez-Caballero, J., Ayvar-Soberanis, S., Curtis, D., (2025), Intelligent real-time tool life prediction for a digital twin framework, Journal of Intelligent Manufacturing, 1-21.
- 35. Li, G., Lu, H., Wang, H., Ran, Y., Ji, R., Liu, Y., Zhang, Y., Cai, B., Yin, X., (2025), A visualization method for cross-scale online monitoring of grinding state based on data-mechanism hybrid-driven digital twin system, Mechanical Systems and Signal Processing, 225, 112293.
Biography
- Chang Hyeon Mun
Postdoctoral researcher in the Department of Mechanical Engineering, Ulsan National Institute of Science and Technology (UNIST). His research interest is digital twin of flexible manufacturing system.
- Jong Woo Han
Ph.D. candidate in the Department of Mechanical Engineering, Ulsan National Institute of Science and Technology (UNIST). His research interest is in smart manufacturing.
- Hyung Wook Park
Professor in the Department of Mechanical Engineering, Ulsan National Institute of Science and Technology (UNIST). His research interest is digital transformation about manufacturing technology.